
エンジニア必見!ロボット導入側から見た【産業ロボットと協働ロボットの違い】とは?

皆さんは、ロボットの種類を全てご存知ですか?
身近なロボットだとPepper君がいてどこかの店頭で触れ合うことも出来たり、一方で工場なんかでは窓の外から大きなロボットが動いているのを眺める、なんてものもあります。
現在の技術では、人と共存できるロボットや、処理速度が早いロボットなどそれぞれ活躍する領域が異なっている、ということになります。
ロボットを実際に導入を検討している企業では、どこでどの作業を自動化するかを明確にしておかないと、ただ処理速度が速いだけで安全が担保されない為になかなか導入が進まない。。。なんてこともあったりします。
そこで今回はロボット導入側から見た各種ロボットの違いを見ていきましょう。
産業ロボットとは、速くて大きくて力持ちなロボット
まずは大きなロボットのイメージがある産業ロボットについてみていきましょう。JIS(日本工業規格)における定義を確認してみましょう。
産業用ロボット:自動制御され、再プログラム可能で、多目的なマニピュレータ(作業を操縦すること)であり、3軸以上でプログラム可能で、1か所に固定又は移動機能をもって、産業自動化の用途に用いられるロボット(JIS B 0134:2015)
と定義されています。言葉がやや難しいので解説をしていきます。自動制御とは、どう動くかを事前にプログラムした内容を元にロボットがプログラム通りに行動します。そのプログラムは都度人間が書き換えることが出来ます。この制御によってロボットは自動で動くことが出来ます。
その上で、操縦作業を行うロボットにおいて、「軸」という言葉が動きを理解する大きなポイントになります。ロボットを「人間の動き」に似せることを目的として、6軸を人間の「身体」「腕」「手首」「手」に対応させることによってロボットは人間と似た自由度の高い動きを再現できるようになります。
【身体の機能・軸】
・腰を回転させる(第1軸)
【腕の機能・軸】
・肩を回して腕を上下させる(第2軸)
・肘を曲げて下腕を上下させる(第3軸)
【手首の機能・軸】
・手首を回転させる(第4軸)
・手首を曲げて上下させる(第5軸)
【手の機能・軸】
・指先を回転させる(第6軸)
「腰」「肩」「肘」「手首(回転/上下)」「指先」の計6軸をロボットが再現することにより、人間にかなり酷似した動きができるようになりました。
6軸での再現が可能となり、現在の人間が行なっている作業をロボットに置き換える可能性が現実的になったのです。
産業ロボットの種類としては、3種類に大きく分けられます。
①垂直多関節ロボット(多軸型ロボット)
現在最も普及している産業用ロボットであり、人間の腕のような構造で、動きの自由度が高い点が特徴。汎用性が高く、溶接や塗装、搬送、組立、出荷作業など幅広い作業に利用されています。

産業ロボットの実例としては、株式会社Mujinでの導入事例を挙げておきます。Mujinでは、従来ロボット内でのプログラムが各社で違うことからロボット毎にそれぞれプログラムを作成する事が必要で、ロボット導入企業は開発までに多くの時間がかかったり、自動化したい作業がなかなか実現できない状況でした。
Mujinでは最適なプログラムを生成する事が出来る為、どのロボットを使用している企業でも動きを最適化する事が出来るんです。これは導入企業にとっては自動化を推進する上での革命と言えるでしょう。
②直交ロボット(スカラー型ロボット)
直交ロボットはスカラー型とも言われ、UFOキャッチャーなどのクレーンゲームと同様に縦、横、高さの3方向のスライドで3次元の動きを実現することが可能。直線的な動きしかできないため作業内容は限定されるが、簡単な構造のため設計の自由度が高く、垂直多関節と比べると安価での導入が出来る点が特徴。

スカラー型では、事前に決められた再現性の作業を行うことに適しています。工場のセル生産などはこの一例と言えるかもしれません。
③パラレルリンクロボット
関節が並列に配置されており、一般的に3本のアームで先端の位置を制御。可動範囲は狭いものの、ベルトコンベアで流れてくる物の整列や選定などに使われます。
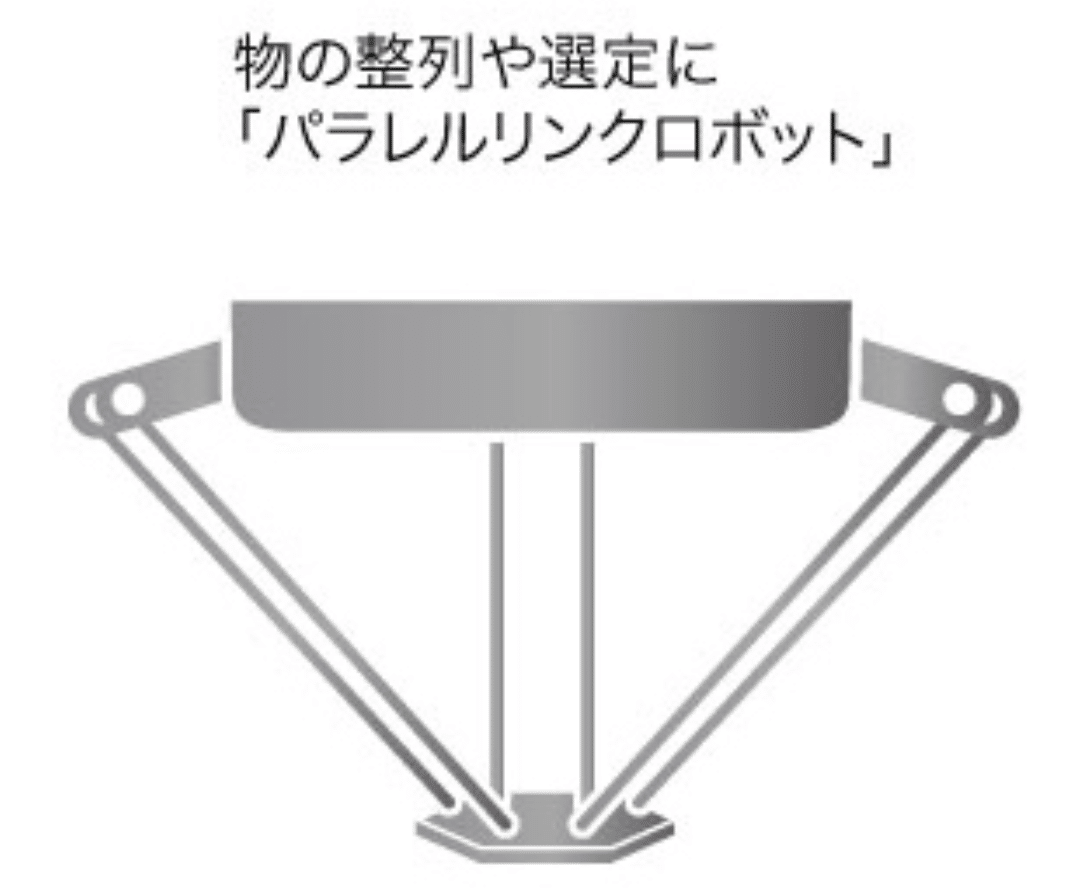
上記2つのロボットに比べ、「可動範囲は狭く、作業速度は早い」という違いがあります。構造自体も比較的上2つよりはシンプルな為、導入がしやすく安価であるメリットもあります。
協働ロボットとは、人と一緒に仕事が出来るロボット
産業ロボット同様に、JISでの定義を確認してみましょう。
協働ロボット:
規定された協働作業空間で,人間と直接的な相互作用をするように設計されたロボット。(JIS B 8433-2:2015 3.2)
産業ロボットと異なり、協働ロボットは作業者と空間を共有しながら作業することを目的として作られるロボットです。安全柵を入れずに導入が出来る反面、その空間内で稼働するロボットと作業者との衝突が容易に考えられることから安全性の担保が必須になります。
近年協働ロボットの導入が加速しているわけですが、この背景にはロボットに関する法律規制の緩和があります。
実は2013年まで80W以上のロボットは柵に囲み、人に危害を加えないよう取り扱う必要がありましたが、ロボットの技術革新によって安全性にも磨きがかかり、2013年の12月に規制が緩和されました。柵を必要とせず協働ロボットを利用できるようになり、大きなスペースを確保する必要はなくなったため、多くの企業で導入が加速したのです。
産業ロボットと協働ロボットの違いは、人と一緒に作業が出来るか
導入側から見た各項目について違いを見ていきます。
作業内容:
産業ロボット --> 人の代わりにロボットが作業をする
協働ロボット -->人の仕事を手助けする作業
ロボットを導入する際に、ロボットを入れる面積や人が通る場所なのかなどが最初に検討する内容です。工場などの作業は「モノ」が対象なので人を対象エリアに入れないことによってロボットでの自動化は可能ですが、介護など対象が「人」になる場合は協働ロボットがマストになります。
また、産業ロボットの場合は明確に「人」と「ロボット」の領域を分ける必要があるので、安全柵などで分離する必要があります。

ロボットのサイズ:
産業ロボット --> 大型で重量
協働ロボット -->小型で軽量
ロボット導入をする上で、既存施設への導入であれば必ず「立地制約」が入ってきます。産業ロボットは能力が高く可搬重量は大きいが故にサイズは大きく重量は重くなります。協働ロボットは安全を考慮し小型で軽量のため導入におけるハードルは下がります。
処理能力:
産業ロボット --> 速くパワーがある
協働ロボット --> 遅くパワーに劣る
比較論にはなりますが、協働ロボットは産業ロボットに比べややスピードとパワーが落ちます。従って導入企業としては「人の作業」と比べて協働ロボットを導入する場合はスピードの劣化を懸念して台数を検討する必要があります。あるいは能力を上げるためにその作業を人の動線から「分離」することで産業ロボットの導入も同時に検討してみてもいいかもしれませんね。
導入費用:
産業ロボット --> 高価
協働ロボット --> 比較的安価
生産性の差にもあるように、速くパワーがある分ロボット自体のサイズも大きくなり価格としては協働ロボットに比べ産業ロボットが高価になります。従って作業を自動化する上で恒久的な対応をするのか、即座に一部でも自動化をしたいのかによって導入する対象も変わり得ます。
人とロボットが共存する時代に突入
これまでは人とロボットは必ず行動範囲を「分離」されていました。しかし、2013年の法改正によって協働ロボットの導入ハードルが下がり人とロボットが共存する未来がすぐそこまできています。
ただ皆さん、思い出してください。アニメ「ドラえもん」ではドラえもんとのび太は共存しています。ディズニー「ベイマックス」でも人とベイマックスは共存しています。従って昔描いていた未来が現実に近づきつつある、ただそれだけです。
今後はよりロボットと人間がもっと密接になる時代になると思います。ワクワクする部分もあり、人間としての価値をロボットに奪われないように自らの成長も志していくことも大切ですね。