ザクっとしか知らなかったけど しっかりと学びたいと思う。 今まで知ってたイメージだと I2C(アイスクエアシーと読む)は と4カ所接続して使うもので、 特徴としては ここから延長ケーブル引っ張って先っぽに タコ足配線して複数の機器を扱えるという便利なもの といったイメージ SDA(データ信号)と、 SCL(クロック信号) で動作している。 ではなぜ複数タコ足配線しても 機器を見分けて認識できるのだろう? 以下 なるほどわかりやすい。 I2Cの機器の特徴 ・I2C
16進数!? 10進数とか2進数とかなんなんなん!? 怒るでしかし!!!!! ということで調べたでしかし!!! 10進数とは 普段私たちが使っている数字。 「10」になると桁上がりする数字。 わかりやすいサイト 16進数とは 「16」になると桁上がりする数字。 「9」の次は「A」になるという悪魔的なルール。 A(10), B(11), C(12), D(13), E(14) F(15) その次が 『10』になるっ!!!!! (10進数だと16だけど) そし
Frame Type選択 Class : Quad Type : X を選択する。 Motor Test ・スピン方向のテスト ・モーター番号チェック ボタン押して回す(必ず小道具をはずす) Radio Calibration CH1 Roll CH2 Pitch CH3 Throttle CH4 Yaw CH5 フライトモード(3ポジションスイッチを使用) フライトモードチャンネルのパラメーター設定は FLTMODE_CH で設定する。 CH6
使用するFCはMATEKSYS H743-MINI メーカーの商品ページのこの辺を参照しながらやり方を進めていく。 今回はこのソフト以外でフラッシュを行うとフリーズしてエラーになるという事がメーカーページに書いてあるため、 STM32CubeProgrammer を使ってArdu firmwareをFlashしていく方法をやってみる。 (BataFlightやINAVも.hexファイルさえあればこれでFlash可能) 書き込みソフトをダウンロードする ・まずはSTM
受信機と送信機の設定はスルー。 やり方 利点 パスフレーズを使っていると、共有で使用している機体にすぐにバインドすることができないが、 この運用方法なら機体のやり取りが簡単にできる (プロポ側での設定の共有は必要)
参考リソース ・Ardupilot ファームウェアが 4.1 以降ということを確認 ・受信機をFCのTX/RX(UARTx)に接続する ・使ってるFCのMapping図を見て繋いだ場所はSERIALxなのか確認する。 ・config tab -> parameter tree のところで 今回はSERIAL7なので SERIAL7_PROTOCOL = 23 (RCIN) RSSI_TYPE = 3 (ReceiverProtocol) に設定する そのままだと
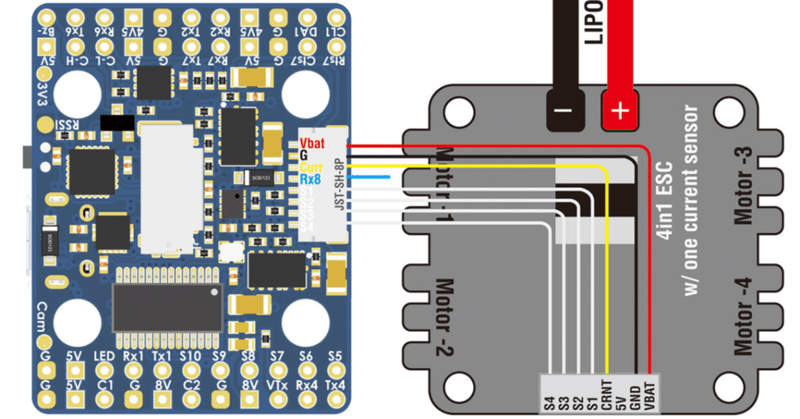
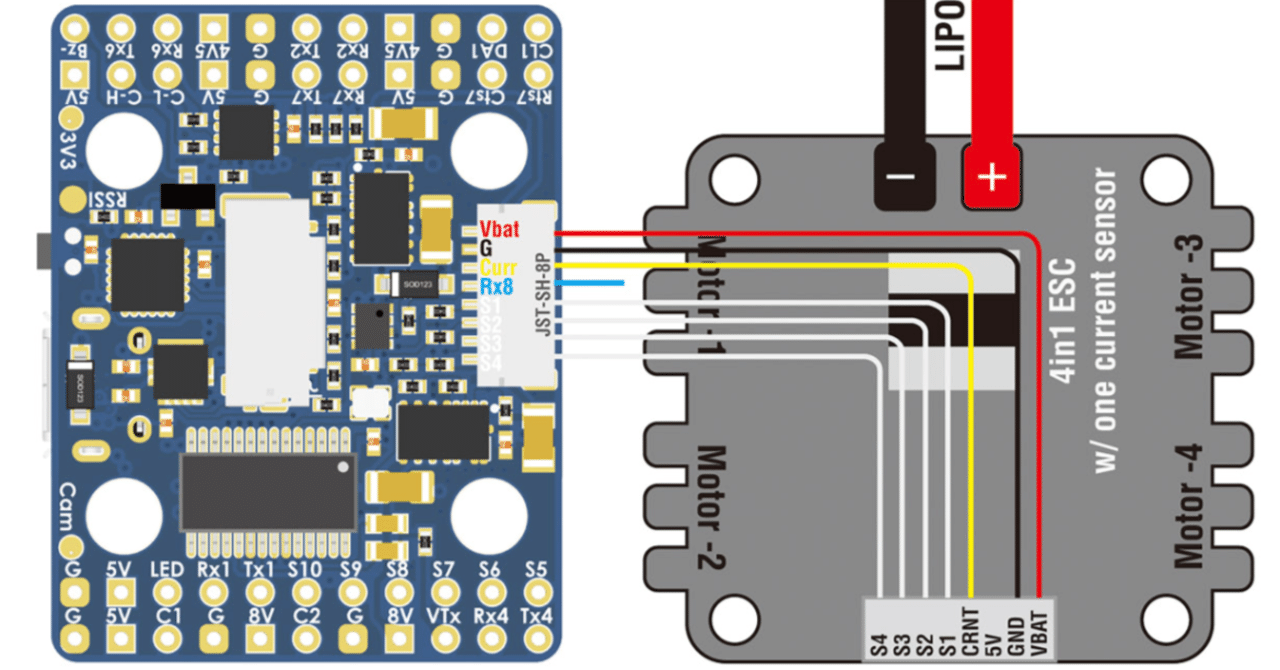
参考文献 以下メモ ESCの種類 ESCにはBLHeli32 とBLHeli_Sってのがある。 使うソフトウェア それぞれBLHeliSuite32(BLHeli32使う場合)というソフトウェア。BLHeliSuite(BLHeli_SのESCを使う場合)というソフトウェアで設定する。 パススルー機能を使ってオートパイロットに繋いだままESCを上記ソフトウェアでいじることができる。 やり方 USB ケーブルを使用して PC をオートパイロットに接続し、地上局