10億分の1 秒の世界を整える驚愕の技術。日本のインフラを支えるフルノの"時刻同期" vol.2

前回の" 時刻同期 "についての記事、いかがだったでしょうか。
今回はさらにこの時刻同期を掘り下げてお話ししていきます。
そして、ここで強力な味方として2名のフルノ社員にご参加いただきます!
時刻同期のためのGNSSモジュールのエンジニア、橋本さんとそれを世界中のマーケットに営業している住田さんです。
お二人に歴史から現在まで幅広く伺っていきます。


なぜフルノが時刻同期をしているのか?
ー まず最初の疑問なんですが、なぜフルノは時刻同期という分野をやっているんでしょうか。海とはかなりかけ離れていますよね。
住田さん「そうですね。でも始まりはやっぱり海の分野ですよ。フルノは魚探、舶用無線と航海計器を開発し、その次に船の位置を調べる測位機器を開発しました。船でも飛行機でも、どの位置にいるのかを知ることは、安全のためにも効率航行のためにも非常に重要ですからね。
1960年頃はまだGNSSどころかGPSもない時代で、当時はロランという技術を活用していました。昔からずっと『測位』というジャンルの製品を作っていましたからGPSが登場した際はGPS測位機器を作るのは自然な流れだったと思います」
ロランとはLong Range Navigationの略で、複数の無線機から発信される電波の到着時間差を測定し、そこから自船の位置を測定する装置です。
フルノでは1962年に日本初のトランジスタ超小型ロラン受信機を販売しました。
GPSの民間初期運用は1993年ですが、1978年から1985年の間には11機の試験衛星が打ち上げられました。フルノでは1983年頃からGPSのリサーチを始め、1986年には最初のGPS受信機を完成させていました。
ー かなり早くからGPS技術に取り掛かっていたんですね。
住田さん「測位だけでなく正確な時刻に関してもかなり初期から取り掛かっていたようです。1989年に開発したGP-500という舶用GPSにはすでにPPS(極めて正確な1秒の信号)の出力機能も搭載されていました。この機能が今の時刻同期の分野に繋がっています」

GP-500
橋本さん「私たちが所属しているシステム機器事業部は陸上分野の強化を狙って1990年に発足しました。陸上分野の可能性を模索する中で、GPSモジュールの開発に着目し、カーナビ市場の活性化とともに事業として成長してきました。そのGPSモジュールを展開する中で、通信関連の研究所から『デジタル同期通信の実験のために1秒パルスが欲しい』という要望をいただいたのが時刻同期の始まりです」
こうして始まったフルノの時刻同期、完成した最初の時刻同期用GPSモジュールGT-74はポケベルの基地局や地震計用などに活用されました。以降、GPSモジュールの新規開発に伴って時刻同期の技術も継続して向上してこられたそうです。GPSからGNSSに進化した現在も、GNSS時刻同期モジュールで国内シェアのトップを誇るフルノ、思ってた以上の歴史がありました。

フルノの時刻同期モジュールは何がどう違うのか?
ー 先ほどのお話しの中で国内トップシェアとのことでしたが、どういった点が評価されているんでしょうか。
橋本さん「時刻同期モジュールには大きく2つの評価軸があります。"精度" と "堅牢性" です」
ー ちょっと難しそうですね。
橋本さん「時刻同期の世界では『精度が良い』という言葉が良く使われますが、意味としては測定値のばらつき具合になります。UTCからのズレも大切ですが、出力するPPS信号の間隔がばらつかないかが非常に重要なのです」
ー ちなみにフルノの時刻同期モジュールは精度が良いんでしょうか。
橋本さん「『世界最高性能です』と自信を持って言えますね。精度が良いという言葉の前には『どんな場所でも』という言葉も入ります。
モバイル通信が3G、4G、5Gと進化するにつれて、5Gの電波は遠くまで届かないので基地局を増加させる必要がありました。そうなると特に都心部では高層ビルによってGNSS衛星からの信号が遮蔽されたり、反射によって劣化するため、基本的には時刻精度が悪化するんです」

ー こうした場所でもばらつかない、というのが大切なんですね。
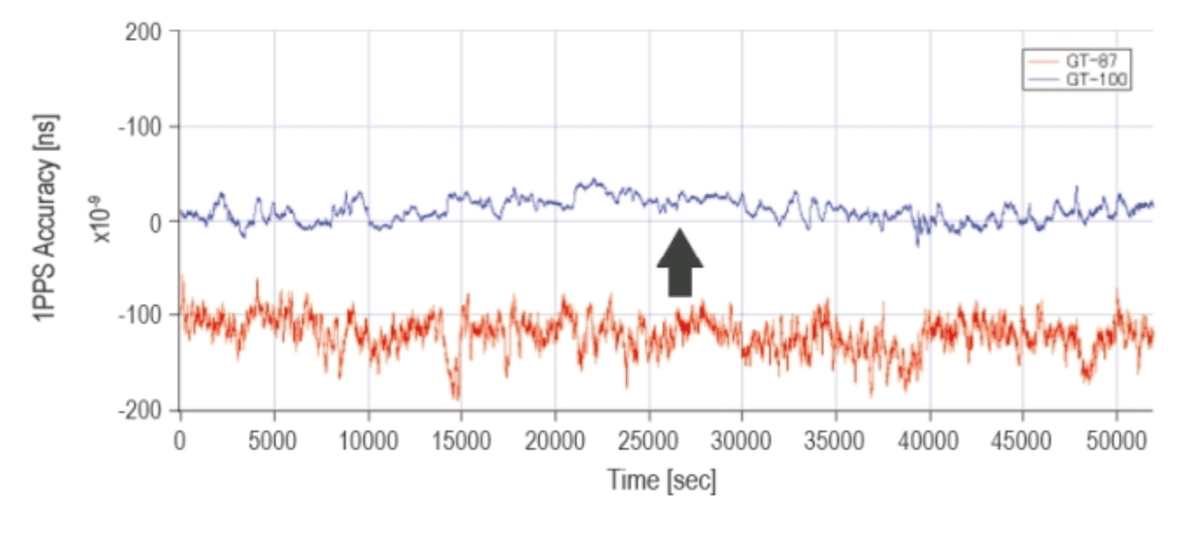
橋本さん「そうですね。ビル街でも時刻精度の劣化を最小限に抑える技術で、従来よりも誤差を1/5に減らすことに成功しました。とても簡単に言うと、ビルで反射した信号などは利用せず、衛星からGNSSアンテナに直接受信した誤差の少ない信号だけを選別して使うという特別な信号処理をしています」
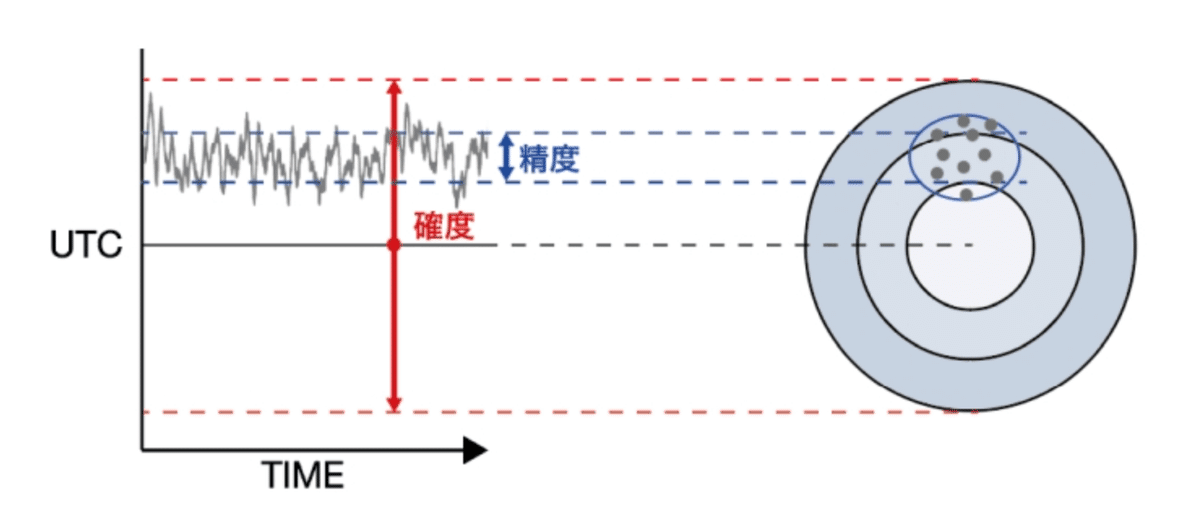
1PPS確度:真値(UTC:協定世界時)からどれだけ離れているかの尺度
1PPS精度:ある期間における確度のばらつきの尺度

どんな時も動きつづける、インフラを支える責任に答える"堅牢性"
ー もうひとつ堅牢性とはどういった内容でしょうか
橋本さん「今お話したビル街や高架下など、GNSS受信機としては過酷な環境下でも正常に動作し続けることもそうです。他には雷によるアンテナ故障や妨害波による受信障害などいろんな障壁がGNSS受信機にはありますね」

ー そういった環境でも壊れないことが求められるんですね
橋本さん「もちろん壊れないことも大切ですが、そういう障害が発生してもできる限り精度を維持し続けることも重要です。
フルノのGNSS受信機はGNSS受信に加えて、水晶発振器を組み合わせた設計にしています。こうすることで、GNSS衛星の信号が途絶えても24時間は誤差を1.5マイクロ秒以内に抑えてモバイル通信に必要な水準を満たし続けることができます。この機能をホールドオーバ機能というんですが、何かトラブルがあっても一定期間精度を継続することで重要インフラのサービスを停止させない。この堅牢性もフルノのGNSS受信機は高い評価を得ています」
このホールドオーバ機能は正常に動作しているときに水晶発振器のズレの傾向を学習しておき、周囲の温度などの環境が変わっても学習した内容に基づいて誤差を抑え込んでいるのだとか。
このように障害を検知し、サービス員が現場に到着するまでの間、インフラを支え続ける。まさに縁の下の力持ちとはこのことだなと感じました。

今回はフルノ社員にも登場いただき、時刻同期についての詳細をお伺いさせていただきました。しかし、『フルノの時刻同期はまだまだこれからだ』とお二人は話します。
今直面している課題や今後の展望を第三弾でお話いただきます。
執筆:高津 みなと
第一弾はこちら
- 海を未来にプロジェクト -