
VFRクロスカントリー考 ゼロから始める航法

飛行機は、A地点から離れたB地点に早く移動したい人間の欲望を叶えるために生まれた乗り物です。したがって、これを運航する操縦者には、AからBに正確にたどりつくための技術「航法」が求められます。しかし、言うだけなら容易いもの。実際にやるとなると、一筋縄ではいかないのが航法です。
地文航法
大昔、パイロットが飛行機を飛ばしながら目視で目的地にたどり着くには、道路地図をそのままコクピットに持ち込んで海岸線や道路に沿って飛ぶしかありませんでした。

地上物標を飛び石のようにして飛んでいくこの地文(ちもん)航法は、しかし、直線的に飛ばないので効率が悪く、到着予定時刻の精度も出ないという問題がありました。
推測航法
飛行機が戦争に使われるようになって、大陸の離れたところにある敵の基地に爆弾を落としたり、洋上で母艦に帰投する必要が出てくると、航法にいっそうの精度が求められるようになりました。
このため、もっぱら航法だけを担当する「航法士」が乗り込んでチャートに線を引き、分度器で角度を測って針路を決定し、未来位置を作図によって推測する、推測航法が発達しました。

言うまでもなく、これは船舶のナビゲーションの応用ですが、空中で止まることが許されず、燃料が切れたら墜落するしかない飛行機にとって、その重要性と難易度は本家を凌駕していたはずです。
推測航法の誤差
一定の針路を保って直線的に飛び、ある時間が経過したらここにいるはずだ、というのが推測航法ですが、「はず」という言葉からも分かる通り、これはまさに「推測」に過ぎないわけです。
例えば、パイロットが手動操縦で飛ばす場合、どうしても針路の保持に「ゆらぎ」が出ます。まっすぐ保持しているつもりでも、他のことに気を取られているうちにヘディングがずれる。これがいかに簡単かつ頻繁に起きるかは、少しでも飛行機を操縦したことがある人ならわかるはずです。ヘディングがずれれば、計画していた目的地の上空から横にポジションがずれてしまいます。これを、保針誤差と言います。

スピード(TAS:真対気速度)の保持も簡単ではありません。飛行機では、スピードメーター(IAS:指示対気速度)が一定の値になるように操縦しても、周りの空気の密度、という外部要因により、対気速度が変わってしまうのです。空気密度は温度と気圧によりますから、高度を変えるだけでTASはどんどん変わってしまいます。スピードが変われば、到着予想時刻にズレが出ます。これを保速誤差と言います。

次に大きいのが風です。大気の中を移動する飛行機は、風によって大気そのものが飛行機と一緒に移動してしまうと、地面からみたスピード、つまり対地速度が変わってしまいます。目的地は地上にあるわけですから、横から風が吹けば左右のポジション、追い風や向かい風なら前後のポジション(=到着時刻)にズレが出ます。これが風による誤差です。

その他、偏差(真北と磁北の差)や自差(コンパスの誤差)の不完全さ、あるいはチャートに引いた線の太さや計算上の切上げなど、細かいものをあげればキリがありません。
操縦に習熟し、誤差をできるだけ小さくする努力は大切です。だからこそ、昔の飛行機は「飛行」と「航法」を分けて、それぞれの仕事に人員を配したわけです。
それでも、誤差は不可避的にあるわけで、推測航法だけで目的地に100%たどり着くと考えるのは、精神論的には尊敬できても、確率論的には間違った態度です。つまり、推測航法では、誤差をゼロにすることはできない。このことを理解することが非常に大事です。
したがって、精度の良い航法を行うには、次に述べる補助航法を使って一定の間隔で誤差をリセットし、結果的に運航全体の航法誤差を許容範囲内に収めることが、大切です。
補助航法
補助航法とは、推測航法の誤差をリセットするための、位置判定(Position Fix)の技術のことです。
具体的には、先述した地上の物標による地文航法、星の位置でやる天文航法、NDBやVOR、DMEなどの電波標識(ビーコン)による電波航法を用いて、正確な機位を確認すること、つまり、今どこにいるかを確定する作業を指します。

地文によるフィックス

複数のビーコンから方角によりフィックス
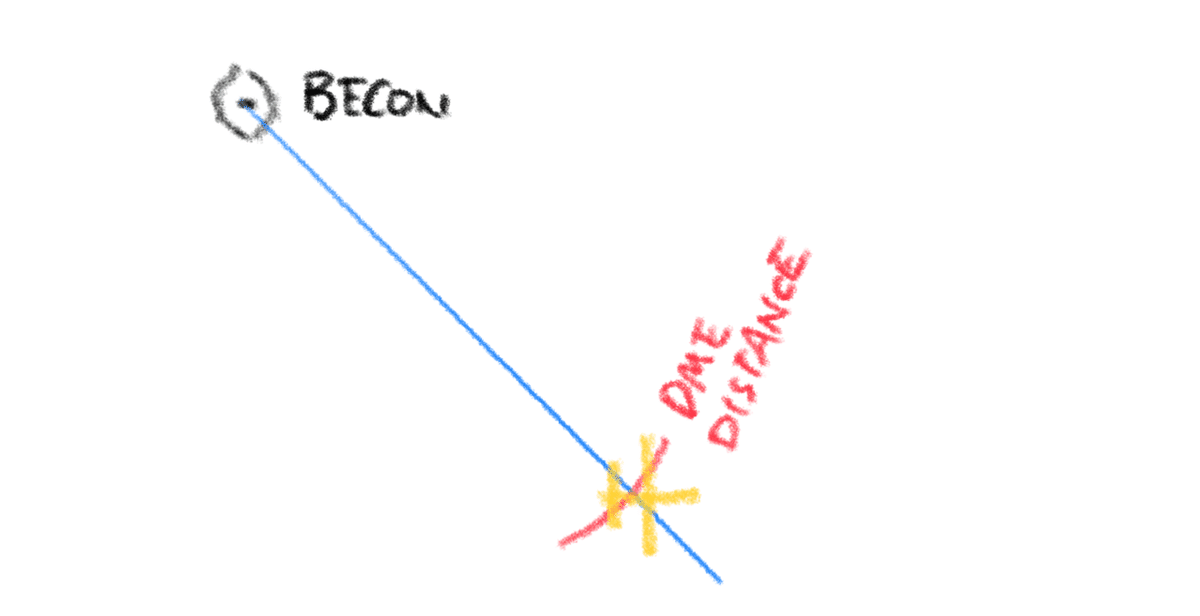
ひとつのビーコンから方角と距離によりフィックス
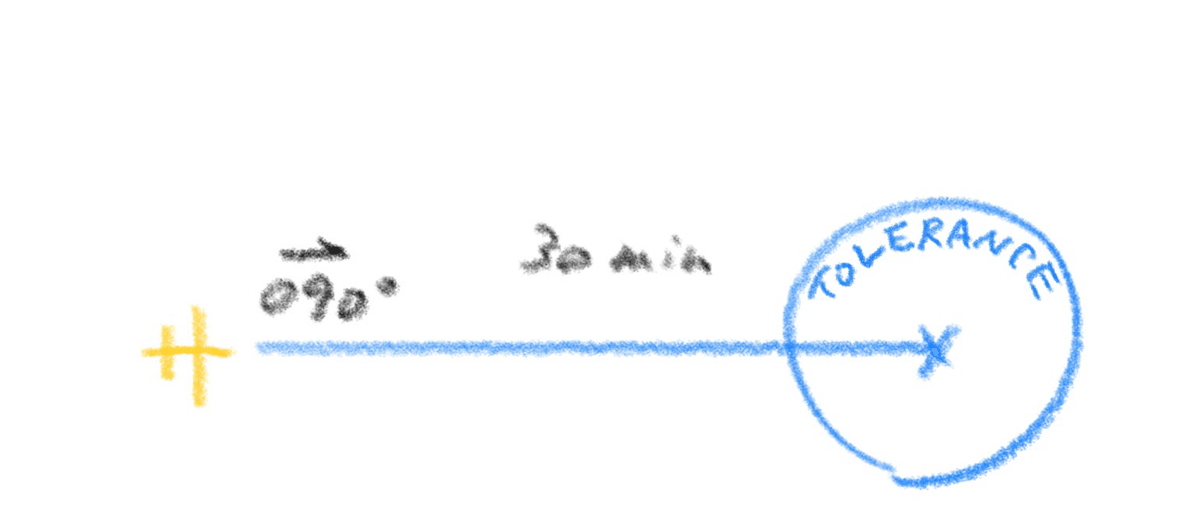
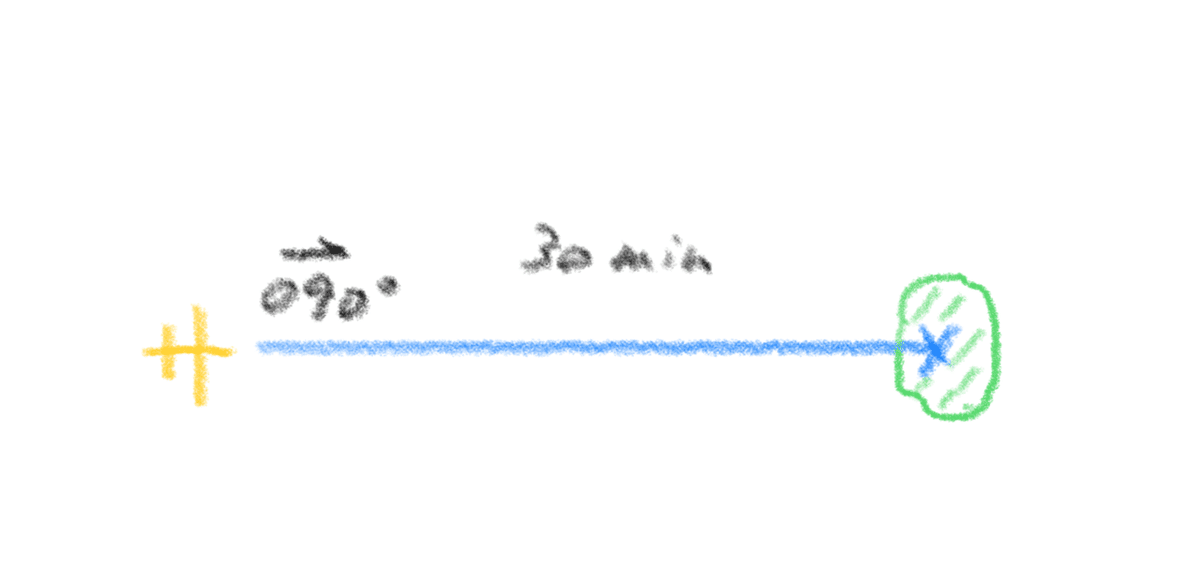
例えば、洋上を推測航法により、針路と速度を守って飛行しているとします。計画では、30分後にある島の直上を通過する予定だったとしましょう。
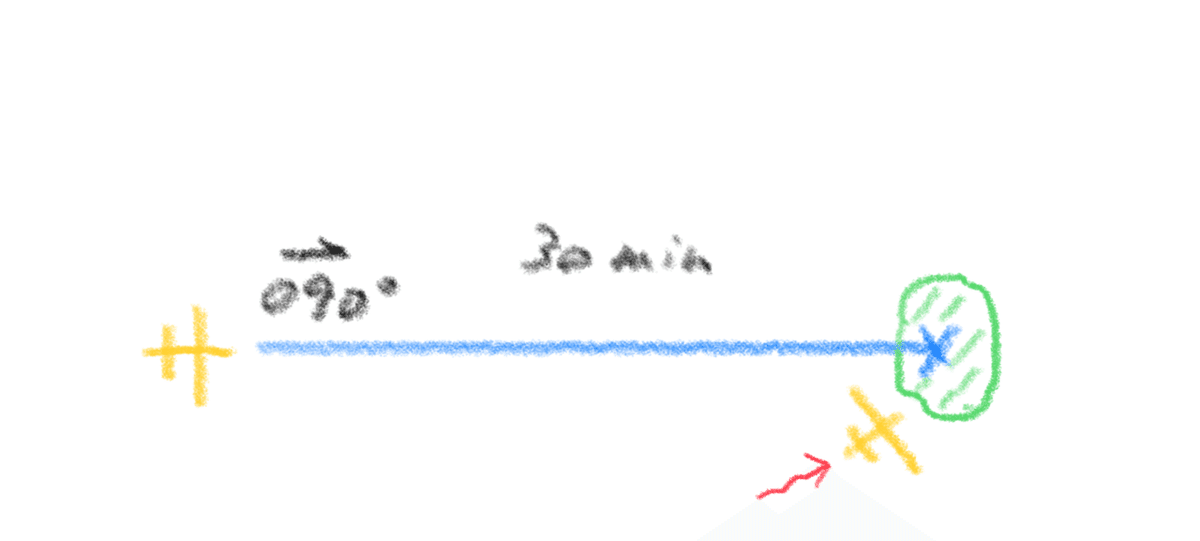
この島が、30分後に自分の左前に見えたとしたら、自分のトラッキングは計画よりも遅く、かつ右にずれていたと判明します。

そうしたら、島が見えた時点で推測航法を終了、目測(地文)で島に向かって飛び、直上を通過する時にもう一度同じようにヘディングと速度を決めて推測航法を開始すれば、次の30分先にも同じような景色が見えるはずです。
このように、どんなに長い距離を飛ぶ場合でも、一定のインターバルでポジションフィックスを行えば、推測航法の誤差拡大を一定の範囲に納めて飛ぶことができます。
自分の保針、保速に自信がある場合は、誤差は計画時の風が変わったためだと考えることができますから、上記の例でいう島の真横で風に対する修正をヘディングで行えば、次のチェックポイントに直接向かうことも可能です。こうすると、推測航法から推測航法へ直接移ることもできて効率的ですが、これは応用です。

あくまで、補助航法でチェックポイント毎にそれまでに累積した誤差を一旦チャラにするという理解がないと、計画時に不適切なチェックポイントを選定したり、チェックポイントの間隔が広すぎたりして、機位を見失うことにつながりかねません。
航法=推測+補助
一旦まとめると、飛行機における「航法」とは、推測航法を主体とし、その誤差を補助航法でリセットしながらできるだけまっすぐ飛ぶことで、目的地に正確に早くたどり着く技能だと言えます。
推測航法と補助航法の2つが組み合わさって初めて航法が機能するという点に注目してください。
パイロットによる航法(Pilotage)
このように、航法とはもともと航法士の仕事でした。パイロットは、ナビゲーターに言われた針路と速度をできるだけ正確に守ることが仕事だったのです。現代の飛行機がGPSを使っているように、昔の飛行機、それもパイロットしかいない単座機が長大な距離を飛行する場合は、基本的には爆撃機などの航法士がいる飛行機に「引っ張って」もらって飛んでいました。
引っ張ってもらった先で、戦闘機なら戦闘という仕事をして、帰りも航法士が乗っている複座機に引っ張ってもらえばいい。単座機(=パイロットしかいない飛行機)によるナビゲーション能力は、ないとされたか、あっても予備的なもので、コクピットについているスタンバイ計器のような位置付けでした。
しかし、いわゆる零戦(れいせん)と呼ばれる大戦中の日本の戦闘機を筆頭に、長大な航続距離を持つ戦闘機が現れると、戦闘機のみによる長距離攻撃を実施するようになります。戦闘機は単座機ですから、パイロット自身がある程度の航法能力を持つことが要求されるようになりました。
これをパイロットによる(ナビゲーターに依らない)航法「Pilotage=パイロッテージ」と区別して呼んでいますが、推測航法により針路と到着予定時刻を決め、補助航法によって誤差をリセットしながら直線的に飛ぶ、という点は同じです。
そうやって必要に駆られて発展した「パイロットによる航法=Pilotage」が、現代の操縦士が訓練で習う航法の元になっているのです。
次回は、今回の内容を踏まえて、現代のパイロットが習熟するべき航法について考えます。
参考文献:
基礎航法教室 時枝 勲
ここから先は

Pilot's note NZ在住Ashの飛行士論
NZ在住のパイロットAshによる飛行士論です。パイロットの就職、海外への転職、訓練のこと、海外エアラインの運航の舞台裏などを、主に個人的な…
Amazonギフトカード5,000円分が当たる
いただいたサポートは、日々の執筆に必要なコーヒー代に使わせていただき、100%作品に還元いたします。なにとぞ、応援のほどよろしくお願いします!