
フラックス・センサ

母校となった大学を選んだ理由は、取り寄せた入学案内にロボットハンドの写真が紹介されていたからだった。
当時ロボットといえば、つくば博覧会で早稲田大学の二足歩行ロボットが脚光を浴びていた。自動化ラインや半導体製造に使われる産業用ロボットというのは既に浸透していたが、自律して自由に動き回るというのはまだまだSFの世界だった。早稲田のWABOTは、正に未来の象徴だった。
一浪の末に私は、別の大学の精密機械工学科という学科に進学した。精密機械なんて聞くと時計のような小さな部品の寄せ集めを連想するが、卒業後の進路は計測器や産業機械の分野が主で、当時コンピュータを主とした電子機器の分野でも人材の需要が高まっていた。滑り止めのつもりで受験したが、卒業後の進路については全く見えていなかった。
4年次に卒業研究のための研究室を選ぶのだが、ロボット研は高嶺の花で私の成績では入れそうにない。そこで見つけたのが、マイクロコンピュータの応用機器を研究する研究室だった。担当教諭は少々取っ付きにくい性格の方で(とはいえウチの学科の教授陣はクセ者揃いなのだが)、面白そうなテーマの割に希望者は少なかった。とりま話を聞きに研究室へ伺うと、意外なことに潤沢な資金をもとに自由闊達な研究活動を進める処と知り、1年間お世話になることを決めた。
先生は(とてもそんな風には見えなかったのだが)大学からMIT留学に推挙されるほどの将来を嘱望された若き研究者だった。先生の恩師という方が長く東京大学で教鞭を執られていた方で、定年で退官された後に個人起業し、かつての教え子たちの集ったワーキンググループを組織していた。研究室の資金は、それに属する企業からの共同研究費として提供されたものだった。
その先生の先生が目指していたのが、フラックスセンサ、磁気方位センサの開発だった。
地球というのは、内部で高温液状化した金属が対流する摩擦により静電気を帯びている。それがいわゆる「地磁気」の発生原理だ。フラックスセンサは磁場を検出して方位を計測する。携行して位置を確認する電子機器「ナビゲーション装置」を実現するために欠かせない要素技術だった。先生の先生、面倒だからY先生と呼称します、はこのセンサをICの域まで小型化して容易に携行できるところまで持っていこう、と目標に据えていた。
IC化のほうは企業にお任せして、我々学生はリファレンスとなるナビゲーション装置の開発に挑むことになった。
Y先生の考案したフラックスセンサとは、こんな構成になっていた。

・地磁気を検出するピックアップコイル
・地磁気を増幅する増幅コイル
・増幅コイルの中にピックアップコイルを挿入する。
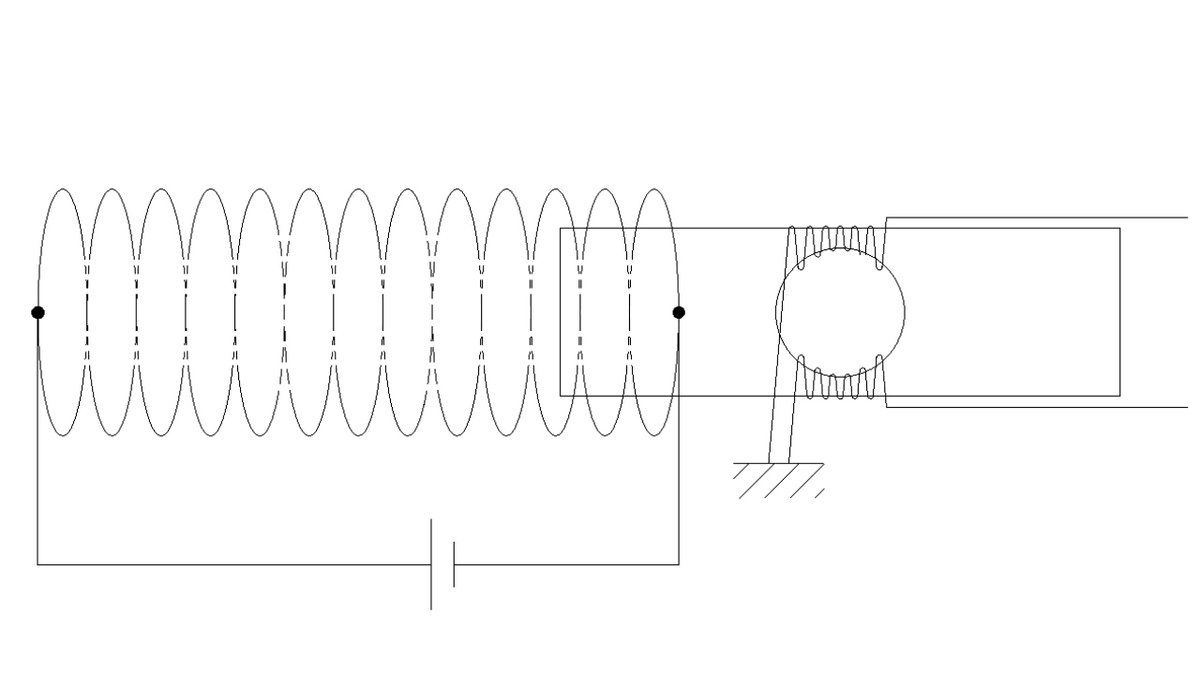

動作原理は
・増幅コイルに電流を流し、磁束を発生させる。
・ピックアップコイルは、増幅コイルにより起電力が生じる。
・増幅コイルの磁束は、地磁気の影響で変動する。
・その変動を、ピックアップコイルの起電力で計測する。
ピックアップコイルの先には、ホイートストンブリッジ回路を繋いで更に増幅させ、その後AD変換してサンプリングする、という具合だ。高校の物理で習うキルヒホッフの法則というのは、こうしてセンサ回路に応用するのだとこの時に初めて知った。
しかしながら、ひとつ問題が生じる。ピックアップコイルの示す電位は、地磁気との角度によって変動し、極軸を起点にするとサイン波形を示す。つまり南を越えると電位が逆転し負電位となる。これではサンプリングに支障が出てしまう。
そこでこんなアイデアが生まれた。1個のフラックスセンサの他に、鉛直に向きを変えたもうひとつのフラックスセンサを組み合わせる。するとセンサ1のサイン波形に対して、センサ2はコサイン波形になるのだ。sinθとcosθを乗算すると値はsin2θ、つまり常に正電位が生まれる仕組みとなる。


基本的なところは、我々学生が参加する前にすでに出来上がっていた。後は理論通りに動作するか検証し、あわよくばディスプレイに地図と位置を示す小型の装置を試作しようというのが卒論のテーマとなった。このテーマには私のほかに、もう一人学生が加わり2人で従事する事になった。
この相方というのが飛び抜けて器用な奴で、製作に難航したピックアップコイルを易々と量産して見せた。何しろ厚さ0.5mmの薄板状のフェライトコアに、極細の銅線を左右100回巻くという代物で、巻いてる最中にフェライトがポキポキ折れてしまう。不良の山を量産する私に、遂に先生はセンサ試作以外の作業を指示した。開始早々でお払い箱である。

先生から指示を受けたのが、センサの感度を測定するための回転台の製作だった。相手は磁力に敏感なセンサ。磁性体の影響を受けやすく、正確な値を測定するには台を非磁性体で構成する必要があった。先生もあれこれ考えていた様で、360度の分度器とナイロン製の軸受けを東急ハンズで揃えてみたが、あとは未着手という処で私にバトンタッチ。
どうしたものか頭を抱える私に、とりあえず秋葉原へ行って何か見繕ってこいと促された。
当時の秋葉原は電気街。今の華やかな面影はなく、平日日中は作業服姿のいかにも電気屋って方々が闊歩していた。裏手に並ぶ店舗はパーツ屋とジャンク屋がひしめいて、表通りに家電店がぽつぽつ並んでいる、そんな風情だった。
訳も分からず街中を歩くと、次第に要領が飲み込めて来た。いつの間にか私も作業服の男達に混じって、店頭で店のおっちゃんにあれこれ聞いて回るようになっていった。
回転台が完成した後も、私は週一程度に秋葉原を巡っては情報と部品を仕入れてくる様になっていた。先生はある程度わたしを見込んで、収集係をやらせていたのかも知れない。インターネットなどない時代、情報収集は「足」が基本だった。
その後はナビゲーション装置のマイコンボード製作が担当となり、不器用ながらも卒業まで取り組んだ。結局装置は完成せず、研究を引き継いだ後輩が翌年完成させることになった。
センサのIC化は実現し、卒業後に新聞記事で成果を知った。腕時計に組み込まれたのだ。コイルをどうやってIC化するのか気になっていたが、アモルファス半導体がコイルに代わって採用された様だった。材料革新、そんな言葉が世間を賑わせていた頃でもあった。
在学中、研究の相方が面白い記事を見つけてきた。米国陸軍が人工衛星による測位システムを開発したというものだ。我々の研究では方位の検出はできても測距という点では問題解決に至ってなかった。成程衛星を使えば一度に問題が解決する。しかし米軍のは兵器としての運用を想定したものだ。我々民間には利用させてもらえないだろう、と私は考えていた。
現代において、フラックスセンサは知らずともGPSなら誰もが知っている。GPSはスマホに組み込まれ、もはや生活に欠かせないものとなった。民間の利用は船舶のナビゲーションから始まったが、その製品をデッドコピーして自動車のナビに使う企業が現れ、一気に需要が加速した。当初は米軍によりスクランブル信号が掛けられ、測位に数メートルの誤差があったが、湾岸戦争でのUNTAC運用に不都合が生じた事から解除され、今ではインフラとして普通に扱われている。こんな未来は想像もしていなかった。
相方は元々興味があったのか、卒業後に人工衛星の分野へ進んだ。先生は昨年の春に定年で退任され、今は引退生活を送っている。
Y先生は鬼籍に入られたと、教え子の方の追悼文で知った。東大にいた頃は電動義手の研究もされていたそうで、現在では生体磁場の検出にフラックスセンサが活用され始めている事との相関に驚いている。ロボットの研究に従事していたY先生が、どうした経緯でフラックスセンサの開発を始めたのか?ずっと不思議に思っていたが、これで点と点が繋がった気がする。
「研究とは二手三手、先の先を読んで行うもの。」
Y先生の想い描いたフラックスセンサの未来は、まだまだずっと先を見据えている。