【ドローン】全方位視覚自律航法マルチコプター

香港科技大学Aerial Robotics Groupの研究者らはオープンソースの全方位視覚空中ロボットプラットフォーム「OmniNxt」および高性能フライトコントローラー「NxtPX4」とマルチ魚眼カメラセットを開発。
【全方位視覚自律航法ドローン】
— Iwahori Toshiki (@iw_toshiki) April 13, 2024
香港科技大学(@hkust)Aerial Robotics Groupの研究者らはオープンソースの全方位視覚空中ロボットプラットフォーム「OmniNxt」および高性能フライトコントローラー「NxtPX4」とマルチ魚眼カメラセットを開発。#ドローン #AI
《OmniNxt: A Fully Open-source and… pic.twitter.com/31toMnxn1w
ドローン(Quadcopter)に全方位視野(omnidirectional Field of View)センサーを採用するにはハードウェア設計やアルゴリズムなどシステムが複雑となることからハードルが高かったが、今回の「OmniNxt」登場によって全方位視覚(Omnidirectional Visual Perception)による自律ナビゲーションの使用が身近となるかもしれない。
AIによる全方位視覚自律ナビゲーションで検査・点検、レコンストラクション、捜索救助などドローン(UAV)の知覚認識能力が向上し、ドローンシステム(UAS)の可能性が拡大する。
OmniNxt: 論文
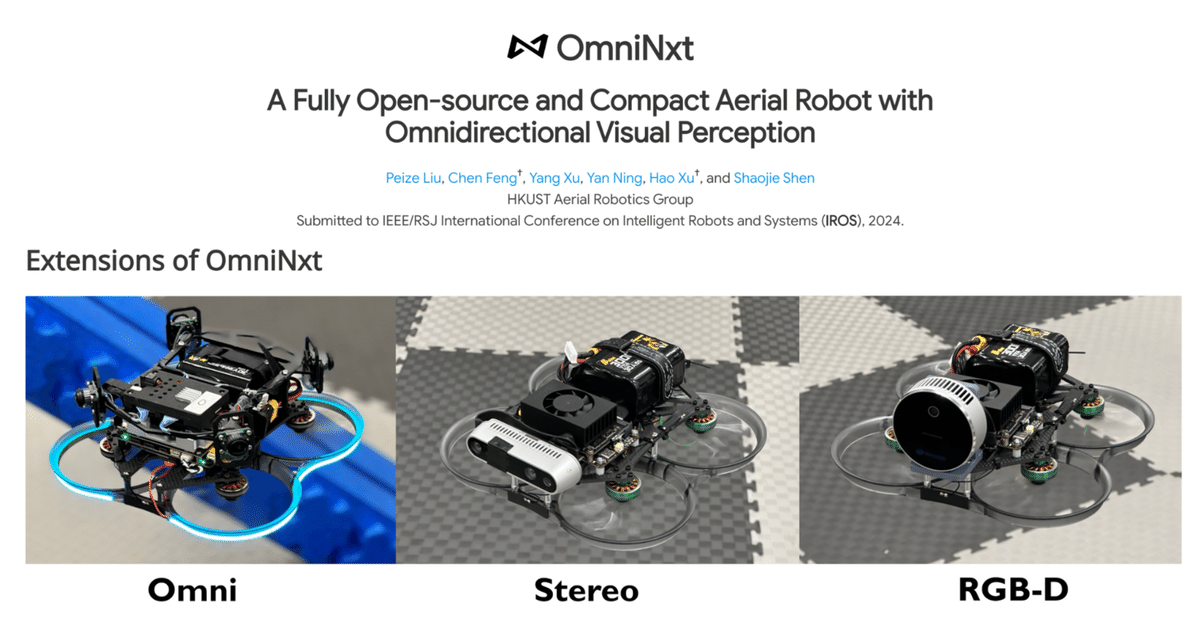
OmniNxt: A Fully Open-source and Compact Aerial Robot with Omnidirectional Visual Perception
DOI: 10.48550/arXiv.2403.20085
Peize Liu, Chen Feng, Yang Xu, Yan Ning, Hao Xu, and Shaojie Shen
HKUST Aerial Robotics Group
Submitted to IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
OmniNxt: GitHub
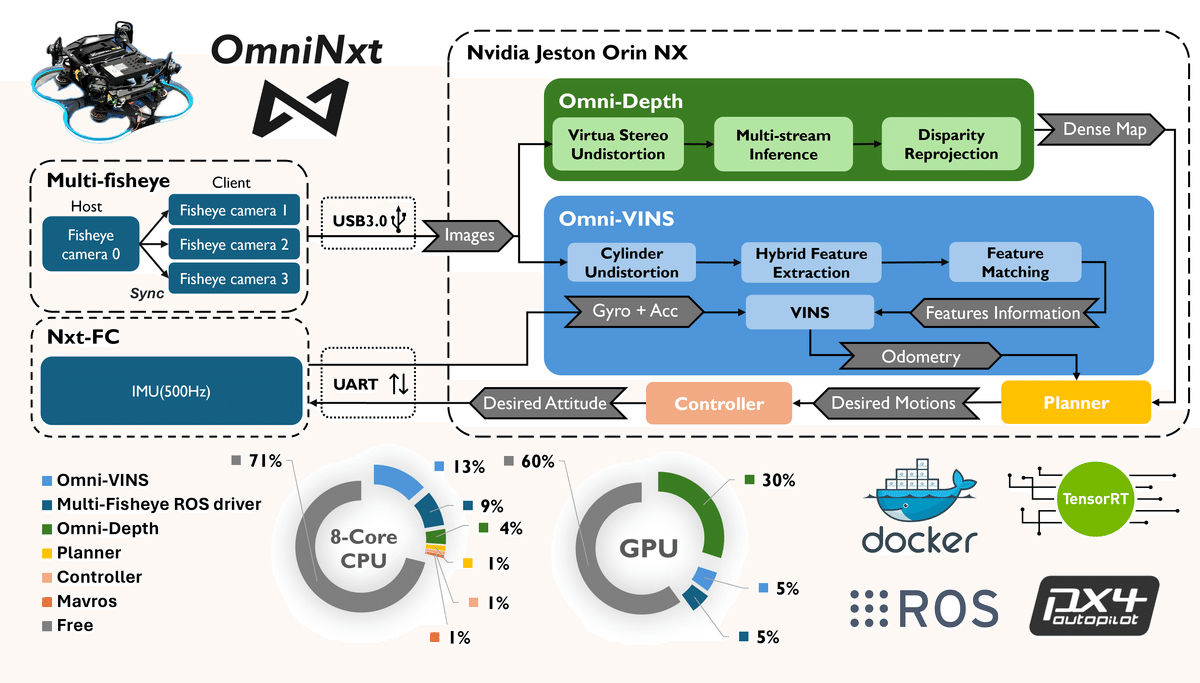
System Overview
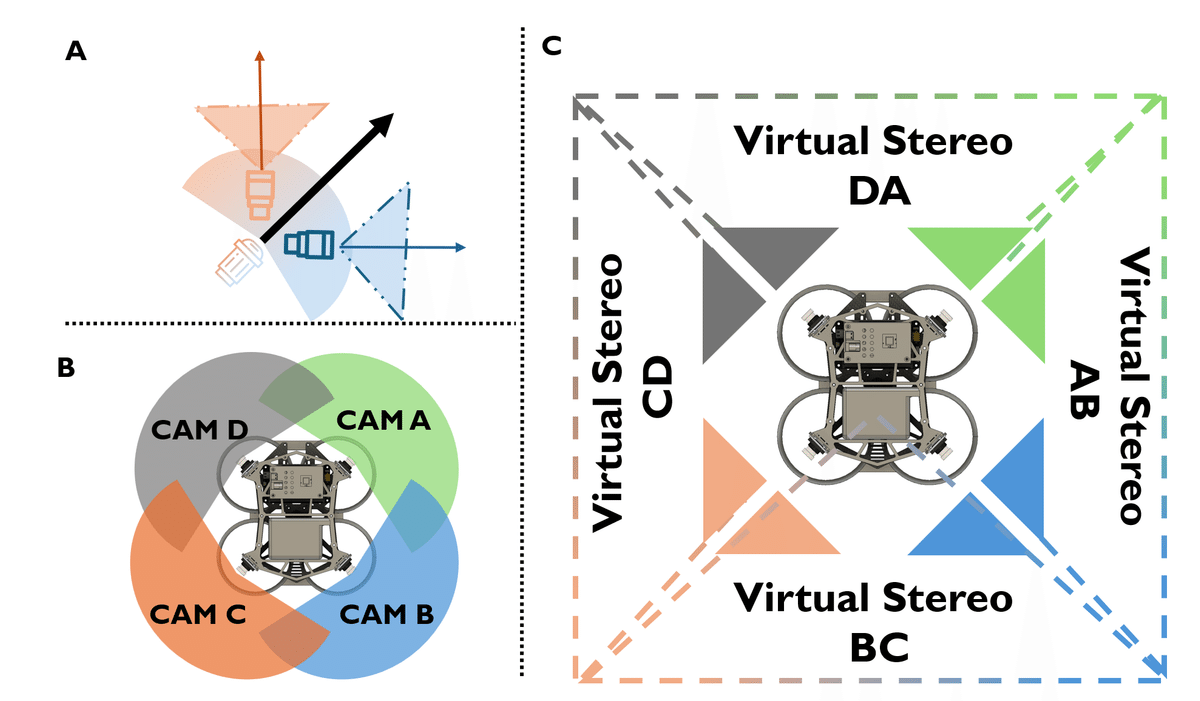
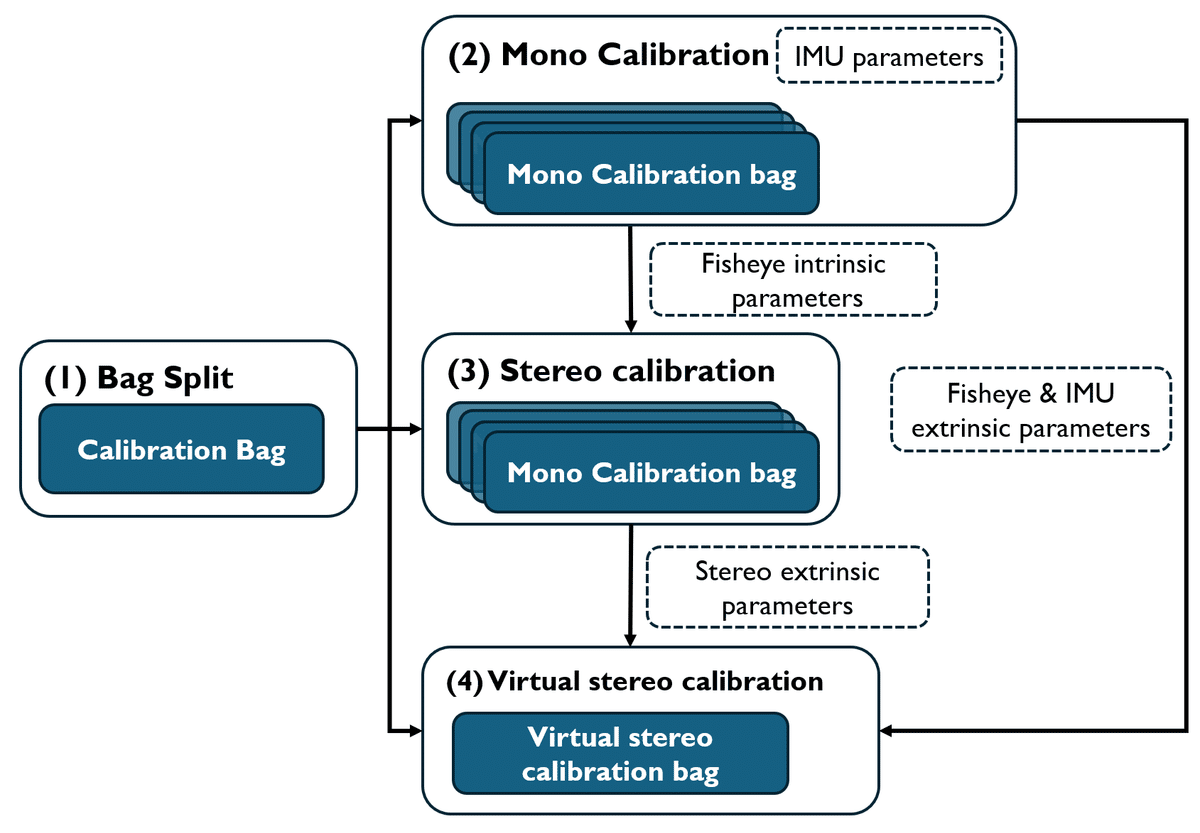
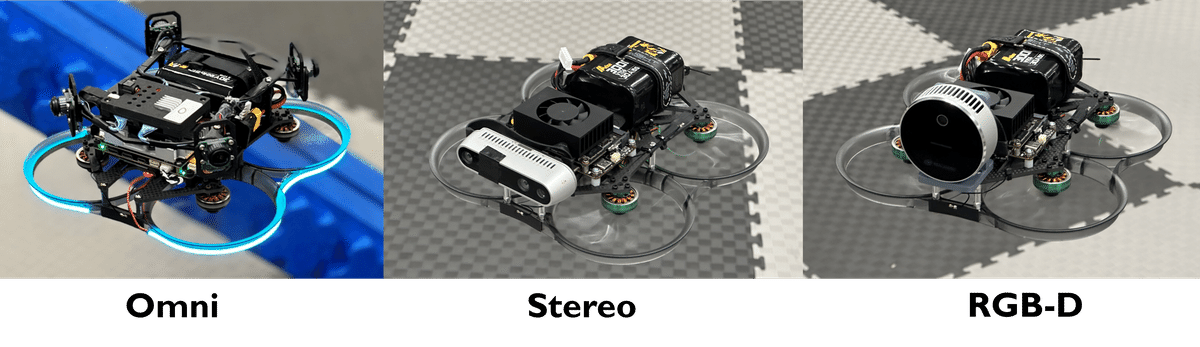
OmniNxt: Multi-fisheye Camera Set
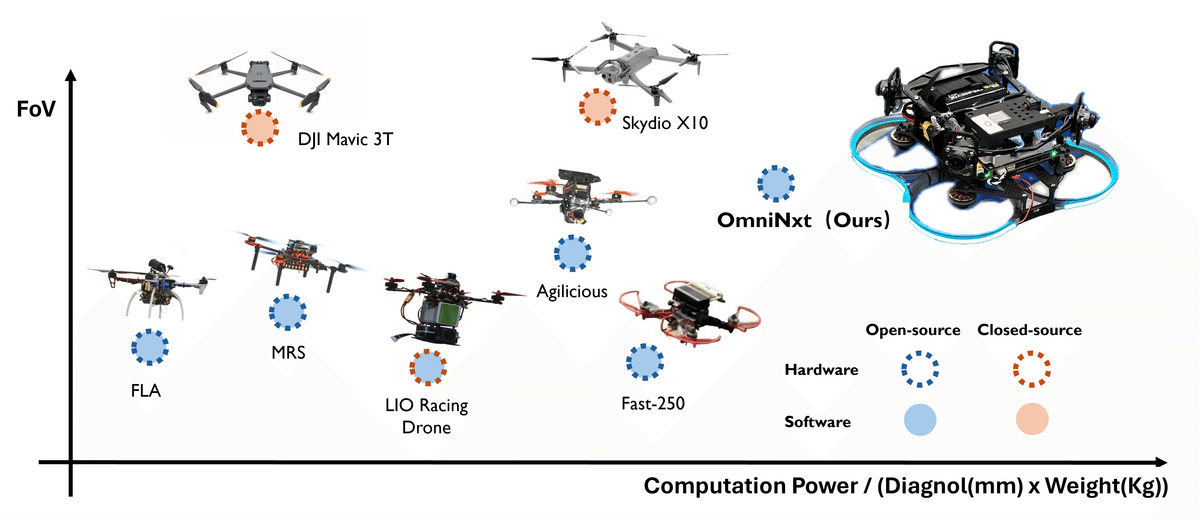
Platforms Comparison
Real-world Experiments
【全方位視覚自律航法ドローン】
— Iwahori Toshiki (@iw_toshiki) April 14, 2024
ICYMI: 香港科技大学(@hkust)Aerial Robotics Groupの全方位視覚空中ロボットプラットフォーム「OmniNxt」。#ドローン #AI
GitHub: https://t.co/1fNHh5nVTE
《OmniNxt: A Fully Open-source and Compact Aerial Robot with Omnidirectional Visual Perception》 pic.twitter.com/Ry3cYIioo2
Extensions of OmniNxt
Video Presentation
香港科技大学の「OmniNxt」は、チューリッヒ大学の「Agilicious」、浙江大学の「Fast-Drone-250」などに続き、ドローン(取り分けマルチコプター)に関する興味深いオープンソースの登場となった。