
虹・振り子・経済成長

七色に輝く虹、時を刻む振り子、景気の循環や経済成長―これらの現象の背後には、共通する、非常にシンプルで普遍的な原理が隠されている。またその原理は非常に神秘的であり、あたかも背後に神の存在を感じさせるものとして多くの人々の心を捉え、数々の理論の発展に影響を与えてきた。
現在、その原理は物理学を中心とする理学から工学へ、そして経済学に至る社会科学へも応用されており、今もなお問題解決上有用な「数学上の技法」であり続けている。しかし、その根底に流れる思想がどのようなものであったか、何を我々が受け継いできているのか、この原理が真に描く「世界観」は、その技法としての認知度に比して、あまりにも知られていない。
この原理は単なる小手先のテクニックではなく「この世界はどういう仕掛けで動いているのか。またそれをどう記述するのか」という思想や世界観の表現である。翻って今日、理学や工学、社会科学の各分野で同じ名を冠する法則や技法が数多存在し、一見しただけではそれらは形式上なんとなく類似して見えるものの、なぜ同じ手法が使えるのか、単に異分野に無理やり当てはめているだけなのではないかと、いまいち判然としなかった。そこでそれらの法則のルーツを紐解くうちに、先人は単なるテクニックの継承ではなく、思想や世界観に魅了され、情熱をかき立てられ、それが理論発展の原動力となったのではないかと思いを馳せるに至り、筆を執った。
なお、以前も類似のテーマで執筆しており、今回はこちらのnote『経済学と化学をつなぐ「見えざる手」』(前後編)の後継作との位置付けである。

舞台は17世紀の光の研究にまで遡る。そこで見い出された一つの原理を皮切りに、時に宗教的、時に科学的なメカニズムを巡る議論を経て、今日のマクロ経済動学の基礎理論に至る技法・思想の発展を描く。なお、各種現象や技法・思想の直観的な説明を心掛けており、途中現れる数式的な説明は読み飛ばしても議論の大筋は追える仕立てとしている。
そして数式については、今回の趣旨である「異分野の理論同士のルーツや結節点を探る」点を踏まえ、現代的に洗練された形式ではなく、敢えて先代技法との類似性が分かるような記述を心掛けた。従い、全く同じ数式から異なる領域の基礎方程式を導く過程を示すが、これは現代の各分野での一般的な記法と必ずしも一致しない点には留意されたい。一方で、それらの専門書では取り扱うことが難しい理論同士の学際的な連続性や差異、それらの成り立ちやルーツに関する示唆に繋がれば本望である。
光には「意志」があるのか?
光が照らし出す、神秘的な世界観
光は真っ直ぐに進み、反射し、屈折する。これら日常的によく見られる光の性質は、古くは古代から発見・証明されてきた。元々は反射や屈折といった様々な現象に関する諸法則としてまとめられてきた光の性質は、1661年にFelmat (フェルマー)によって見出された原理により、統一的に説明可能となった。それは、現在「Felmatの原理」として知られる、「光は、その通過時間が最小になるような経路を選んで通る」という主張である。つまり、ある2点間で光がどのような進路をとるかを眺めると、光はあたかも自身が一種の意志を持っているかのように、常にその2点を最小の時間で通れるような経路を選んで通っているという、ある意味で非常に神秘的な主張である。
Felmatの原理
光は、その通過時間が最小になるような経路を選んで通る

例えば以下のような光の屈折現象も、次のように説明される。

図のA点からB点を直線で結ぶと黒線のようになるが、実際には赤線の通りガラス板に進入した光はガラス板方向に屈折し、ガラス板から出る時に元の角度に戻る。幾何学的な距離は黒線ルートが最短だが、B点への到達時間が最短となるルートはこれとは限らない。なぜなら光は水やガラス中を通過する時、真空中に比べて速さが遅くなるためである。実は赤線ルートの方が、全体的な経路長は折れ線の分だけ迂回し長くなっている一方、ガラス板を通る距離は短くなっており、その結果早くガラス板を抜けられることによる時間短縮分が迂回のタイムロスを上回り、より短時間でB点に到達できる。そして現実の光はまさにこのルートを選び、通過時間が最短になるように進んでいるのであり、これこそ「Felmatの原理」の主張するところである。
光の反射についても同様である。以下の通り光が鏡面に反射するケースでは、光は一貫して真空中を進むため速さは常に一定であり、通過時間は光路の幾何学的な長さに比例する。つまりA点からB点までの経路の長さが最短となる鏡面上の点であり、それはよく知られる「入射角=反射角」となる点である。仮想的にはA点からB点までのルートは黒線や青線など無数に書くことができるが、例えば黒線のルートA点から鏡面までの距離は短いが、その分反射後のB点までは余分に進む必要がある(青線で逆も然り)。こうして通過時間が最短となるルート(赤字)を選び出すと、そのルートは実際に光が辿る経路と一致している。これも「Felmatの原理」が主張するところである。

とある物理学者(兼神学者)の情熱
当時Felmatの原理は「背後に神の存在を感じさせる神秘的な原理」として多くの物理学者を魅了したが、その中の一人にMaupertuis(モーペルテュイ)という物理学者がいた。Maupertuisは、光と同様に天体や粒子、ひいては身近な物体が動く軌跡も、全てこれと同様の方法によって描き出せるのではないかと考え、1744年に光学現象(光の直進・反射・屈折)に即してこの考え方を述べた後、1746年には自然現象全般に関わる原理として改めて主張し直している。そこでのMaupertuisの言明は、次のようなものであった。
Maupertuisの言明:自然において何らかの変化が起こるときには、その変化に必要な作用の量は、可能な限り少ない

ここで「作用の量とは、諸物体の質量とそれらの速度並びにそれらが通過する距離の積」とされているが、数学的な定式化は与えられていない。また「速度」や「距離」が具体的に何を指すのかについても詳しくは述べられていない。その意味でこの言明は、自然科学・数理科学の法則としての厳密性を欠いたものであった。また、Maupertuisの論文の主旨は、この主張を通じて神の存在証明を行うという宗教的情熱に基づいており、こうした神学的傾向もMaupertuisに対する低評価に少なからず影響したようである。
とはいえ、確かにFelmatの原理には、得も言われぬ神秘さがあることも事実である。まるで森羅万象を予め熟知した全知全能の神が存在し、光の行き先を知り、その行程が最短になるように進路を定めているようである。この法則は当時の神学と結びつき「神は倹約家である」という格言まで生まれたそうだ。この神秘性でもってあらゆる自然現象も同様のメカニズムで成りなっていると考えるのは、現代の目から見ると行き過ぎで突拍子もなく映るが、それほどの情熱をかき立てるほど美しい法則であり、そうであって欲しいと願い、色々な現象に適用してみたいと思う気持ちは理解できる。そしておそらくこのアブダクション的発想、その根底に流れる「美しさや秩序への憧れ」こそが、幾世代にも渡って科学を発展させてきた原動力なのであろう。

例えば、Felmatの原理を物体の運動に適用しようとした場合、真っ先に想起されるのは「物体が現実に辿る経路を他の仮想的な経路と比較した場合に、本命の経路上では『何か』が最小になっているのではないか」ということである。光の場合は「通過時間」が最小化されることが基本原理であった。但し、物体の運動において「最小になっている量」は通過時間そのものではあるまい。何故なら、もし実際にそうであれば物体は2点を結ぶ経路において、常に(通過時間が最小となる)直線ルートだけを選んで通るが、例えばキャッチボールでボールは山なりの放物線を描いて飛んでいくように、時間のかかる曲線の迂回ルートを進むことも当たり前に行われるためである。従って、もし何か最小化されている量があったとしても、おそらくそれは何か別の量である。歴史的にはMaupertuisに続く2人の数学者・物理学者によって「『何か』の中身は不明だが、仮にそれが最小化されるとしたら成り立つ関係式」が導かれ、そこに特定の「何か」を当てはめることによって、今日我々が良く知る運動の法則が浮かび上がる。
運動の背後で最小化される「何か」
神の御業を記述せよ
Maupertuisのややあいまいで不明晰な表現を「真に有用な新しい原理へと発展させた」と称されるのは、Euler(オイラー)とLagrange(ラグランジュ)である。彼らは、運動に伴って最小化される物理量「作用」が満たすべき性質を厳密に定式化した。まずEulerが一つの物体の運動について幾何学的に論じ、次いでLagrangeが複数の物体に拡張した、というの黎明期における「最小作用の原理」発展の歴史観であろう。
最小作用の原理
物体は、「作用と呼ばれる量」が最小になるような経路に沿って運動する

ここで後の数学的な議論の準備のため、「最小作用の原理」定式化の流れについて触れておく。作用$${S}$$は、例えばA点からB点までの経路に沿って定義されるある量$${L}$$を2点間の移動時間$${t\in [t_1 t_2]}$$で積分することにより定義される。ここで新たに出てくる$${L(q_i, \dot{q_i},t)}$$はLagrangian(ラグランジアン)と呼ばれる。$${q_i, \dot{q_i}}$$はそれぞれ物体$${i}$$の一般化座標(位置)、一般化速度である。つまり「物体はA点からB点までの各ルート上の位置と速度で決まる$${L(q_i, \dot{q_i},t)}$$が最小化されるルートに沿って運動する」と考える。
$${S=\displaystyle\int_{t_1}^{t_2} L(q_i, \dot{q}_i, t)dt}$$
ここでLagrangeは新しい記号$${\delta}$$を導入する。微小量を表す$${d}$$などと似て非なる概念で、$${\delta q}$$は「元の経路を仮想的に少しずらした経路を考える」という意味になる。一方、$${dq}$$は「元の経路に沿って物体が微小時間だけ動いた際の位置の微小変化」という意味になる。つまり、ある経路を少しずらした経路を下図の黒線に対する赤線のルートと考える時、そこで計算されるLagrangianは$${L(q_i+\delta q_i, \dot{q}_i+\delta \dot{q_i}, t)}$$、作用は$${S+\delta S}$$と書けるはずだ。
$${S+\delta S=\displaystyle\int_{t_1}^{t_2} L(q_i+\delta q_i, \dot{q}_i+\delta \dot{q_i}, t)dt}$$

ここで「ある経路で作用が最小化されている」時、そこから経路を微小にずらした際に作用がどう変化するかを考える。これは高校数学の微分の極値問題に相当する。つまり作用$${S}$$は停留点において最小化(極小化)されるため、その条件は$${\delta S =0}$$となる。
ここで、経路をずらした時のLagrangianをTaylor展開し、一次の項まで書き下せば、以下のようになる。
$${L(q_i+\delta q_i, \dot{q}_i+\delta \dot{q_i}, t)=L(q_i, \dot{q}_i, t)+\dfrac{\partial L(q_i, \dot{q}_i, t)}{\partial q_i}\delta q_i+\dfrac{\partial L(q_i, \dot{q}_i, t)}{\partial \dot{q_i}}\delta \dot{q_i}+\cdots}$$
元の経路のLagrangianとの差をとることで以下の式を得る。
$${L(q_i+\delta q_i, \dot{q}_i+\delta \dot{q_i}, t)-L(q_i, \dot{q}_i, t)=\dfrac{\partial L(q_i, \dot{q}_i, t)}{\partial q_i}\delta q_i+\dfrac{\partial L(q_i, \dot{q}_i, t)}{\partial \dot{q_i}}\delta \dot{q_i}}$$
つまり$${\delta S}$$は上式の時間積分として記述できるため、
$${\delta S = \displaystyle\int_{t_1}^{t_2}\bigg\{\dfrac{\partial L(q_i, \dot{q}_i, t)}{\partial q_i}\delta q_i+\dfrac{\partial L(q_i, \dot{q}_i, t)}{\partial \dot{q_i}}\delta \dot{q_i}\bigg\}dt}$$
となる。ここで部分積分を用いて上式を変形し、
$${\delta S = \displaystyle\int_{t_1}^{t_2}\dfrac{\partial L(q_i, \dot{q}_i, t)}{\partial q_i}\delta q_idt+\bigg[\dfrac{\partial L(q_i, \dot{q}_i, t)}{\partial \dot{q_i}}\delta q_i\bigg]_{t_1}^{t_2}-\displaystyle\int_{t_1}^{t_2}\dfrac{d}{dt}\dfrac{\partial L(q_i, \dot{q}_i, t)}{\partial \dot{q_i}}\delta q_idt}$$
としたうえで、被積分関数の項をまとめると以下を得る。
$${\delta S = \bigg[\dfrac{\partial L(q_i, \dot{q}_i, t)}{\partial \dot{q_i}}\delta q_i\bigg]_{t_1}^{t_2}+\displaystyle\int_{t_1}^{t_2}\bigg\{\dfrac{\partial L(q_i, \dot{q}_i, t)}{\partial q_i}-\dfrac{d}{dt}\dfrac{\partial L(q_i, \dot{q}_i, t)}{\partial \dot{q_i}}\bigg\}\delta q_idt}$$
ここで、右辺第1項には$${\delta q_i(t)}$$(時間依存性を明示的に記述)が含まれるが、$${t=t_1}$$(つまりスタート地点のA点)と$${t=t_2}$$(ゴールのB点)は固定されているため$${\delta q(t_1)=\delta q(t_2) =0}$$となり、従って右辺第1項はゼロとなる。また右辺第2項にも$${\delta q_i(t)}$$が含まれているが、この項が経路のあらゆる地点でゼロとなるためには、中カッコ内の項が常にゼロでなければならない。このことから、今日では解析力学の基礎方程式として非常に有名なEuler-Lagrange方程式が導かれる。これは「(現時点では)$${L}$$が何かよく分からないが、その$${L}$$が存在するならばこの方程式を満たす必要がある」ことを意味している。
Euler-Lagrange方程式:$${\dfrac{\partial L}{\partial q}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{q}}=0}$$
次に、物体が何らかの拘束を受けながら運動する場合を考える。簡単のため、以下では2物体の運動とする。拘束力としては、例えば2物体がひもで繋がれており、相互に制約を受けながら運動するシチュエーションなどを思い浮かべるとよい。ここでその拘束条件を$${g(q_1, q_2)=0}$$と書く。
先程と同じ要領で、作用$${S}$$と経路の微小なずれに伴う作用の微小変化$${\delta S}$$は次の通りに書ける。
$${\begin{cases}S(q_1(t), q_2(t))=\displaystyle\int_{t_1}^{t_2} L(q_1,q_2, \dot{q}_1,\dot{q}_2, t)dt \\ \\ \delta S = \displaystyle\int_{t_1}^{t_2}\bigg\{\bigg(\dfrac{\partial L}{\partial q_1}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{q_1}}\bigg)\delta q_1+\bigg(\dfrac{\partial L}{\partial q_2}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{q_2}}\bigg)\delta q_2\bigg\}dt\end{cases}}$$
ここで、経路の微小なずれ$${\delta}$$に対する拘束条件のずれ$${\delta g}$$は以下の通り書ける。これはちょうど微小変化に対する全微分を与える式に対応している。そして$${q_1}$$と$${q_2}$$は常に拘束条件$${g(q_1, q_2)=0}$$を満たすため、$${\delta g =0}$$である。
$${\delta g=\dfrac{\partial g}{\partial q_1}\delta q_1+\dfrac{\partial g}{\partial {q_2}}\delta {q_2}=0}$$
ここで停留条件$${\delta S =0}$$を考える。例えば$${\delta S}$$のカッコ内の項:$${\dfrac{\partial L}{\partial q_i}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{q_i}}}$$($${i=1, 2}$$)が常にゼロであれば停留条件は満たされるが、必ずしもこれらがゼロである必要はない。というのも、$${\delta S =0}$$と$${\delta g =0}$$の式を見比べ、$${\delta q_i}$$の各項の係数比較をすることで、任意の定数$${\lambda}$$の自由度を許して以下の関係が成り立てば、同じく停留条件が満たされるためだ。
$${\begin{cases}\dfrac{\partial L}{\partial q_1}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{q_1}}=-\lambda \dfrac{\partial g}{\partial q_1} \\ \\ \dfrac{\partial L}{\partial q_2}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{q_2}}=-\lambda \dfrac{\partial g}{\partial q_2}\end{cases}}$$
$${\therefore\delta S =-\displaystyle\int_{t_1}^{t_2}\lambda\bigg(\dfrac{\partial g}{\partial q_1}\delta q_1+\dfrac{\partial g}{\partial q_2}\delta q_2\bigg)dt=0}$$
従って、拘束条件下におけるEuler-Lagrange方程式は以下の通りまとめることができる。
$${\begin{cases}\dfrac{\partial L}{\partial q_1}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{q_1}}+\lambda \dfrac{\partial g}{\partial q_1}=0 \\ \\ \dfrac{\partial L}{\partial q_2}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{q_2}}+\lambda \dfrac{\partial g}{\partial q_2}=0 \\ \\ g(q_1, q_2) = 0 \end{cases}}$$
ここで、形式的ではあるがLagrangian$${L}$$に、拘束条件と定数$${\lambda}$$の積を加えたものを新たなLagrangian$${L'}$$とおく。
$${L'=L+ \lambda g}$$
さらに特殊なケースとして、$${L}$$が速度に依存しない、すなわち$${\dfrac{\partial L}{\partial \dot{q_i}}=0}$$とすると、Euler-Lagrange方程式は下記のようになる。
$${\begin{cases}\dfrac{\partial L'}{\partial q_1}=0 \\ \\ \dfrac{\partial L'}{\partial q_2}=0 \\ \\ \dfrac{\partial L'}{\partial \lambda}=g(q_1, q_2) = 0 \end{cases}}$$
これは、今日我々が工学や社会科学でもよく目にするLagrangeの未定定数法そのものである。つまりLagrangeの未定定数法とは、拘束条件下におけるEuler-Lagrange方程式(の特殊ケース)に他ならない。最後に一般の場合として、$${n}$$個の物体、$${A}$$個の拘束条件がある場合についてまとめる。
拘束条件下におけるEuler-Lagrange方程式 (Lagrangeの未定定数法)
$${\forall i \in \{1, \cdots, n\}}$$、$${\forall j \in \{1, \cdots, A\}}$$に対して、以下が成り立つ
$${\begin{cases}\dfrac{\partial L}{\partial q_i}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{q_i}}+\displaystyle\sum_{j=1}^{A}\lambda_j \dfrac{\partial g_j}{\partial q_i}=0 \\ \\ \dfrac{\partial L'}{\partial \lambda_j}=g_j=0 \end{cases}}$$
例えば経済学の専門書でもLagrangeの未定定数法は紹介されるが、基本的には数学的な技法としての紹介に留まるのではないか。現に私も、ミクロ経済学の連載にて、効用最大化問題の解法として以下のように紹介している。
補足:Lagrangeの未定乗数法
有界閉領域$${D}$$において、$${C^1}$$級(1階微分可能)の関数$${f(x_1, x_2), g(x_1, x_2)}$$がある。今、$${g(x_1, x_2)=0}$$を制約条件とするとき、$${f(x_1, x_2)}$$の最大値もしくは最小値を与える点$${(x_1^*, x_2^*)}$$は、以下のいずれかの条件を満たすが、このうち3.に該当するのがLagrangeの未定乗数法である。
$${D}$$の境界上で、$${g(x_1^*, x_2^*)=0}$$となる端点解
曲線$${g(x_1, x_2)=0}$$上の特異点
$${i.e (x_1^*, x_2^*)}$$が$${\dfrac{\partial g}{\partial x_1}=\dfrac{\partial g}{\partial x_2}=0}$$を満たす点は、3.の$${\lambda g(x_1, x_2)}$$の項が微分によりゼロになるため、未定乗数法で求められない解となるある実数$${\lambda}$$が存在し、$${L(x_1, x_2, \lambda)=f(x_1, x_2)-\lambda g(x_1, x_2)}$$に対して、$${(x_1^*, x_2^*, \lambda)}$$が$${\dfrac{\partial L}{\partial x_1}=\dfrac{\partial L}{\partial x_2}=\dfrac{\partial L}{\partial \lambda}=0}$$を満たす(Lagrangeの未定乗数法)
上記の最適化問題は、端点解、特異解でなければ3.により解が求まるが、1.及び2.の成否も確かめる必要がある。3.の条件を計算すると、
$${\Bigg(\dfrac{\partial f}{\partial x_1}, \dfrac{\partial f}{\partial x_2} \Bigg)=-\lambda \Bigg(\dfrac{\partial g}{\partial x_1}, \dfrac{\partial g}{\partial x_2} \Bigg)}$$
となるが、左辺は$${f}$$の勾配$${\nabla f}$$($${f}$$が最も急に上昇する方向)を表し、これが右辺の$${-\lambda \nabla g}$$と等しいため、目的関数$${f}$$と制約式$${g}$$の勾配が真逆の方向を向いていることを意味する。
一方、Euler-Lagrange方程式から導出することで、そもそもこの手法が生まれた背景としての「最小作用の原理」、そして理論をそこに至らしめた神秘的な世界観の描写という深遠な情熱をも引き継がれていることに気が付く。また技法的な意味でも、本来はある変数$${x}$$とその時間変化量$${\dot{x}}$$のペアに対して成り立つ方程式であるが、例えば効用最大化のようなベーシックな経済学的問題では時間変化を取り扱わないため、未定定数法のこういった側面も見落とされたままとなってしまう可能性もある。
かくして最小作用の原理の帰結であるEuler-Lagrange方程式が導かれた。しかし、くどいようだが結局「Lagrangian$${L}$$」が何か分からなければこの式は絵に描いた餅である。この式が力学やほかの分野へ応用されるにはこの$${L}$$が何なのか、特定される必要がある。
そして、振り子は動き出す
―光はその通過時間を最小化するように経路を選ぶ。では、物体の運動は何を最小化しているのか。その物理量はきっと非常に基礎的で、物理学上も重要な意味を持った量であるに違いない―。おそらくそのような情熱で取り組んでいた物理学者にとっては、現実はいささか期待外れであっただろう。何しろ物体の運動に伴って最小化されていた量は、直接観測できず、物理学上も大した意味を見い出せない量であったのだから。
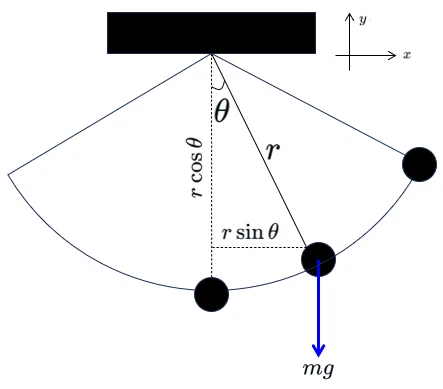
結論から述べれば、物体の運動に伴って最小化されるLagrangianの正体は、その物体が持つ運動エネルギー$${T}$$と位置エネルギー$${V}$$の差、つまり$${T-V}$$であった。例えば、下図のように$${x,y}$$座標をとった単振り子の問題を考える。振り子が持つ各エネルギーは$${T=\dfrac{1}{2}m\dot{x}^2, V=mgy}$$である。また、振り子がたわまずに運動するとすれば、その拘束条件は「常にひもの長さ$${r}$$を半径とする円上を動く」ことから$${g(x, y)=x^2+y^y-r^2=0}$$となる。
従って、系のLagrangian$${L'}$$は以下の通りとなる。
$${L'=L+\lambda g=\dfrac{1}{2}m(\dot{x}^2+\dot{y}^2)-mgy+\lambda(x^2+y^2-r^2)}$$
従って、Euler-Lagrange方程式より、下記の関係式が成り立つ。
$${\begin{cases}\dfrac{\partial L}{\partial x}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{x}}+\lambda\dfrac{\partial g}{\partial x}=0 \Leftrightarrow 2\lambda x-m\ddot{x}=0 \\ \\\dfrac{\partial L}{\partial y}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{y}}+\lambda\dfrac{\partial g}{\partial y}=0 \Leftrightarrow -mg+2\lambda y -m\ddot{y} =0 \\ \\\dfrac{\partial L'}{\partial \lambda}=x^2+y^2-r^2=0\end{cases}}$$
ここで、デカルト座標系$${(x,y)}$$を極座標$${(r, \theta)}$$に変換する。
$${x=r\sin{\theta}, y=-r\cos{\theta}}$$
するとEuler-Lagrange方程式の第1式と第2式は極座標を用いて以下の通り書き替えられる。
$${\begin{cases}2\lambda \sin{\theta}-m(-\dot{\theta}^2\sin{\theta}+\ddot{\theta}\cos{\theta})=0 \\ \\ -\dfrac{mg}{r}-2\lambda \cos{\theta}-m(\dot{\theta}^2\cos{\theta}+\ddot{\theta}\sin{\theta})=0\end{cases}}$$
上式より$${\lambda}$$を消去し、以下の単振り子における運動方程式を得る。
単振り子の運動方程式:$${\ddot{\theta}=-\dfrac{g}{r}\sin{\theta}}$$
かくも美しく、さほど美しくない世界
上記のように、Euler-Lagrange方程式とLagrangian$${L=T-V}$$を用いてNewtonの運動方程式を再構成する力学体系は、現在は解析力学として知られる。しかし、解析力学はあくまでNewtonの古典力学と同値であり、これにより未解決問題(例えば3体問題など)が解けるようにはならない。またそもそも、結果的に$${L=T-V}$$という意味不明な量を持ち出して、「それが最小化するように物体が運動する」と言われても、元々$${L=T-V}$$自体がそうなるように勝手に決めた意味不明な量であるからして、議論が堂々巡りというか、さしたる神秘性も感じられないような気分になってくる。
しかし、今日理解されている「最小作用の原理」の威力は、古典力学の世界に留まらない。何せ、これまで見てきたような古典力学の基礎方程式である運動方程式に加え、電磁気学の基礎であるMaxwell方程式、電子など微視的な物理現象を記述する量子力学の基礎方程式であるSchrödinger方程式、更に相対論的量子力学の基礎方程式であるDirac方程式などは全て「最小作用の原理」から統一的な同じようなプロセスで導出することができるのだ。そしてさらに重要なことに、このプロセス自体が、物理を体系的視点で見た「場の理論」の理論形式の基本部分そのものにもなっている。
つまり、作用やLagrangianは「得体の知れないものだがその視点で自然界を見つめた時、一見関係のない自然現象を表す方程式同士の間に、ある種の共通点が見つかる」というものだ。換言すれば、「作用」というものを受け入れた時、自然界の普遍性やルールが見えてくる、とも言える。
そこまで驚異的で美しい統一的概念であればむしろ、各論である古典力学のLagrangianも基礎的な意味づけができる量であって欲しかったが、そこまでは美しくなかった、ということなのか。なんとも自然は不思議である。
神ではなく、人間が決める
神は誰か?
物語的には、あまりにも美しすぎる光の法則に魅了されて導き出した運動の法則がいささか不本意な結末だったという歴史的変遷は、次なる理論の発展を引き起こす大きな精神的変化の契機となった、と言えるかもしれない。
Felmatの原理をある種の始祖とする発想や世界観は脈々と受け継がれているものの、その系譜を振り返ると、途中で思想的に一つの大きな変化が生じていることに気づく。Felmatの原理や解析力学の時点では「最小化すべき量」は基本的に宇宙や神が定めるもので、学問全体の関心が「宇宙や神は何を最小化する形で世界の掟を定めているのか」という具合に、「宇宙の秩序を見抜く」という理学的な問いに向けられていた。
一方で、20世紀以降に発展した理論の中には、上記のような問いの部分が消え(もしくは薄まり)、もっぱら「応用」という工学的な側面に焦点が当てられたものも存在する。これは「最小化(もしくは最大化)される量」は神ではなく人間が自由に決めるものだという、大きな精神の変化を伴って理論が発展してきたことを意味する。これから見ていくマクロ経済学における経済成長モデルも、このスタンスを引き継いでいると言えるだろう。つまりこの場合の「最小化(もしくは最大化)すべき量」は基本的に人間が定めるもので、例えば企業や政策当局がコストや経済的ロスを最小(もしくは利潤などを最大)にしたいという願望を抱えている時、その要望に合わせて理論を構築することができる。この「理学から工学への精神性の変化」が歴史的に理学と工学・社会科学とを分かつ大きな分岐点となったとも言えよう。
"見えざる手"の筆跡
長らく経済学は、新古典派に代表されるミクロ経済学と、Keynesに代表されるマクロ経済学に二分されていた。公理論的な原理・原則に基づき演繹的に理論を発展させてきた前者と、ミクロ的な基礎づけは一旦脇に置き、現実の問題解決を優先してきた後者の溝は深く、ミクロ的理論の積み上げによりマクロ現象を説明する試みはことごとく失敗してきた(合成の誤謬)。
ミクロ経済学の主流派である新古典派の"教義"は、基本的には「各経済主体のミクロ的な自由行動が『見えざる手』の価格均衡メカニズムによって社会を最良の状態へ導く」とする一般均衡理論であり、「厚生経済学の第一基本定理」によってそのような均衡が(Pareto)効率的であることが1950年に証明され、続く1954年には不動点定理によってそのような均衡の存在定理が非常に一般的な形で導出された。
上記の一般均衡理論は「静学的」なモデルであり、均衡の存在や均衡状態における効率性については明らかにしたが、実際にどのように均衡状態に向かうのか、という「動学的」な示唆はそこからは得られずにいた。そんな中、解析力学の考え方を応用し、1960年代頃から発展した「マクロ動学的一般均衡モデル」の登場により、事態が大きく変容した。このモデルによりKeynes経済学のIS-LM曲線などをミクロ的原理から演繹的に作り上げることに成功したのである。そこでカギとなったのはまさにEuler-Lagrange方程式が内包する動学的性質、つまり投資や消費を時間的にどういう曲線に従って行っていけば、将来期間に渡る効用を最大化できるか、という問題設定であった。
今日、マクロ動学的一般均衡モデルは代表的なものでもRamsey-Cass-Koopmansモデルに始まり、RBCモデル、DSGEモデルと多岐に渡るが、以下では中でも最も基本的な経済成長モデルであるRamsey-Cass-KoopmansモデルをEuler-Lagrange方程式から導出したい。そこではミクロ的な消費者の企業の最適行動の結果、経済がどのように均衡点に向かうかが記述される。

いま、代表的家計(消費者)と代表的生産者(企業)が存在する経済を考える。消費者の消費$${c(t)}$$に対する効用関数$${u(c(t))}$$は、以下のCRRA(Constant Relative Risk Aversion;相対的リスク回避度一定)型と仮定する。
$${u(c(t)) \equiv \dfrac{{c(t)}^{1-\theta}-1}{1-\theta}}$$、$${\theta}$$:相対的リスク回避度
消費者に課せられた制約条件として、消費者の収入である賃金収入$${w(t)}$$と利子収入$${r(t)k(t)}$$(=資本$${k(t)}$$と利子率$${r(t)}$$の積)の和が、支出である消費$${c(t)}$$と投資$${I(t)}$$の和に等しい。
$${r(t)k(t)+w(t)=c(t)+I(t)}$$
つまり、毎期消費者が労働と利子で賃金を得て、投資と消費を行う経済を想定している。一方、資本の蓄積速度$${\dot{k}(t)}$$は、投資$${I(t)}$$と資本減耗$${\xi k(t)}$$(=資本$${k(t)}$$と資本減耗率$${\xi}$$の積)の差で表せる。
$${\dot{k}(t)=I(t)-\xi k(t)}$$
上式より投資$${I(t)}$$を消去し、以下の制約式を得る。
$${r(t)k(t)+w(t)-c(t)-\dot{k}(t)-\xi k(t)=0}$$
続いて、企業の生産行動を考える。生産関数はCobb-Douglas型と仮定する。企業は投資を受け入れ、消費者を雇って生産を行い、利子と賃金を支払う。
$${f(t)=Ak(t)^\alpha l(t)^{1-\alpha}}$$
ここで、$${A}$$:全要素生産性、$${l(t)}$$:労働投入量、$${\alpha}$$:資本分配率、である。以下では簡単のため全要素生産性$${A=1}$$とし、完全競争を仮定して利子率と賃金を求める。この時、利子率は資本の限界生産性、賃金は労働の限界生産性と等しくなるため以下の関係式を得る。
$${\begin{cases} r(t)=\dfrac{\partial f}{\partial k}=\alpha k(t)^{\alpha-1} l(t)^{1-\alpha} \\ \\w(t)=\dfrac{\partial f}{\partial l}=(1-\alpha)k(t)^\alpha l(t)^{-\alpha}\end{cases}}$$
ここで、人口が増えないとして$${l=1}$$を仮定すると、生産物は利払いと賃金に分割され、以下の等式を得る。
$${f(t)=k(t)^\alpha=r(t)k(t)+w(t)}$$
上式を先ほどの制約式に代入することで、以下を得る。
$${k(t)^\alpha-c(t)-\dot{k}(t)-\xi k(t)=0}$$
ここまでで消費者の効用関数の特定化と、企業の完全競争を考慮した制約式の導出を行った。続いて、消費者の無限期間に渡る効用最大化を考える。将来の消費に対する割引率を$${\rho}$$とするとき、効用の現在価値$${S}$$は、
$${S=\displaystyle\int_{0}^{\infin}e^{-\rho t}u(c(t))dt}$$
と表せる。いま、効用の現在価値$${S}$$を作用、効用関数$${u(c(t))}$$をLagrangian$${L}$$と見なす時、拘束条件下におけるLagrangian$${L'}$$は、具体的な効用関数の形状を用いて次の通り表せる。
$${L'(c, k, \dot{k}, t)=e^{-\rho t}\dfrac{{c(t)}^{1-\theta}-1}{1-\theta}+\lambda \big\{\dot{k}(t)-{k(t)}^\alpha+\xi k(t)+c(t)\big\}}$$
この時、Euler-Lagrange方程式から、次の関係式を得る。
$${\begin{cases}\dfrac{\partial L}{\partial c}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{c}}+\lambda\dfrac{\partial g}{\partial c}=0 \Leftrightarrow \lambda = -e^{-\rho t}c(t)^\theta \\ \\\dfrac{\partial L}{\partial k}-\dfrac{d}{dt}\dfrac{\partial L}{\partial \dot{k}}+\lambda\dfrac{\partial g}{\partial k}=0 \Leftrightarrow \bigg\{\xi - \alpha k(t)^{\alpha-1}-\dfrac{d}{dt}\bigg\}\lambda=0 \end{cases}}$$
上式から$${\lambda}$$を消去することで、経済成長を記述するマクロ経済動学の基本的な方程式である、Ramsey-Cass-Koopmansモデルを得る。
Ramsey–Cass–Koopmansモデル:$${\dfrac{\dot{c}(t)}{c(t)}=\dfrac{1}{\theta}\big\{\alpha k(t)^{\alpha-1}-\rho -\xi \big\}}$$
以下では、このRamsey-Cass-Koopmansモデルを用いて経済の動学的性質を議論したい。その前提として、以下では簡単化のため資本減耗を考慮しない($${\xi=0}$$)が、それでも以降の論旨には影響しない。この時、消費と資本の動学方程式は、以下の通り記述される。
$${\begin{cases} \dot{c}(t)=\dfrac{1}{\theta}\bigg\{\dfrac{\partial f(k)}{\partial k}-\rho\bigg\}c(t)\\ \\\dot{k}(t)=f(k)-c(t)\end{cases}}$$
上式の第1式より、$${\dfrac{\partial f(k)}{\partial k} \bigg|_{k=k^*}=\rho}$$となる$${k=k^*}$$を定義した時、以下の$${c-k}$$平面上において$${k⋛k^* \Rightarrow \dot{c}⋚0}$$の関係が成り立つ($${\because f'>0, f''<0}$$)。また、第2式より、$${c⋛f(k)=k^\alpha \Rightarrow \dot{k}⋚0}$$が成り立つ。
ここで、消費$${c}$$と資本$${k}$$の状態を以下の位相図で示す。黒い2本の点線はそれぞれ$${\dot{c}=0}$$、$${\dot{k}=0}$$を満たす。ここで、1人当たり資本の初期値$${k_0}$$は所与、つまり外生的に与えられると仮定する。一方、1人当たり消費の初期値$${c_0}$$は消費者が任意の水準に決めることができる。従って、例えば図の緑点が存在する垂直な一点鎖線上の任意の点から経済は出発可能である。

RCKモデルでは、経済成長は赤い鞍点経路に沿って実現し、最終的に定常状態に到達する。つまり1人当たり資本$${k_0}$$が与えられれば、消費者が最適な初期消費$${c_0}$$を決定し、その後は鞍点経路を辿って定常状態に到達する訳だ。
ここで、鞍点経路から外れる場合を考える。経路から外れてもその時点の$${k}$$に対して最適な消費を決定することで鞍点経路に戻る場合は、鞍点経路の安定性は維持される。一方、例えば図の領域$${I}$$まで大きく逸脱してしまうパターンや、領域$${III}$$まで逸脱してしまうパターンである。前者は消費過剰の状態で、資本がゼロになり縦軸上を下に推移し消費がゼロになる。後者は投資過剰の状態で、全ての生産が投資され、消費がゼロになる。これらはいずれの場合も消費者の効用最大化に違反しているため、実際に選択されることはない。従い、鞍点経路から外れた場合もその時点の$${k}$$における鞍点経路にすぐに復帰し、均衡状態に至る。つまり、RCKモデルは「毎期競争均衡と消費者の効用最大化が達成されることによって、経済の定常状態が達成される」ことを示している。
これは「消費者は効用を最大化する」ことを人間が定めた結果、経済が安定的な成長に導かれるという「見えざる手」の動き、いわば「筆跡」を再現したものといえよう。今日ではより複雑な動学モデルが数多開発されているが、その基本となるRCKモデルに受け継がれている世界観は、確かにそれらのモデルに息づいている。
熱狂の正体
「最小作用の原理」がいかに人々を魅了し、理論の発展が紡がれてきたのかを私なりに解釈してきた。発想の原点は、異分野に大胆に持ち込むアブダクションと、そうせずにはいられないほどの熱狂、情熱である。
ではこの原理はなぜそこまでの熱狂、情熱をかき立てるのか。「実は目に見えている現象は、目に見えない何かに支配されている」という神秘さ、そしてそれが「何かを最小化している」というシンプルさである。それが光の現象を束ね、解析力学を経て物理学のあらゆる分野を束ね、そして社会科学まで束ねようとしている。物事を統一的な概念で説明できることは非常に美しく、説得力がある。まさに同じ内容の主張を、経済学の巨人であるSamuelson(サミュエルソン)も唱えていたことを、前作『経済学と化学をつなぐ「見えざる手」(後編)』にて取り上げていた。
様々な理論の中心的な特徴の間に類似性が存在していることは、一つの一般理論が存在することを暗示している。なぜなら、一般理論が様々な理論の根底にあり、中心的な特徴に関してそれらの理論を統合しているからである

ではなぜ我々は、シンプルさを、統一理論を、追い求めるのか。なぜロマンを感じるのか。それは人間の性なのだろうか。
いや、もしかしたらもう答えは出ているのかもしれない。そこにはきっと、こんな法則が働いているに違いない―。
人間は、原理の数が最小になるような経路を選んで熱狂する