MuJoCo Unityプラグインの使い方

「MuJoCo Unityプラグイン」の使い方をまとめました。
・macOS 12.4
・MuJoCo 2.2.1
1. MuJoCo
「MuJoCo」(Multi-Joint dynamics with Conntact)は、ロボット工学、バイオメカニクス、グラフィックスとアニメーション、機械学習など、多関節構造の高速で正確なシミュレーションを必要とする研究を促進することを目的に開発された、汎用物理エンジンです。
Roboti LLCによって開発され、2021年10月にDeepMindが引き継ぎ無料で利用できるようになり、2022年5月にオープンソース化されました。
2. MuJoCo Unityプラグイン
「MuJoCo Unityプラグイン」は、UnityでMuJoCoの物理エンジンを使用するためのプラグインです。「MJCFファイル」をインポートして、Unityエディタでモデルを編集できます。
このプラグインは、アセット、ゲームロジック、シミュレーション時間など、ほとんどの面で Unity に依存していますが、オブジェクトの移動方法はMuJoCoが決定します。そして、デザイナーがMuJoCo の完全な API にアクセスできるようにしています。
3. MuJoCoのインストール
はじめに「MuJoCo」単体で動作確認してみます。
(1) MuJoCoの実行ファイルをダウンロードして解凍。
macOSの場合は、「mujoco-2.2.1-macos-universal2.dmg」になります。
(2) MuJoCoの実行ファイルを実行。
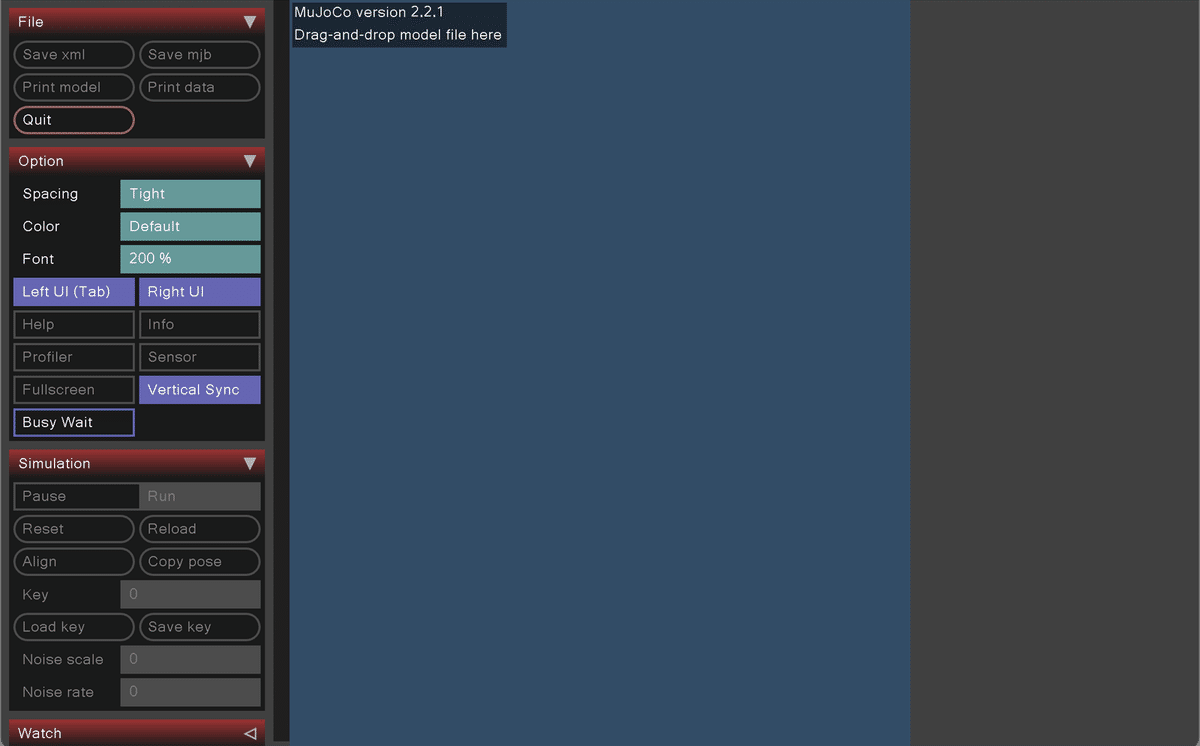
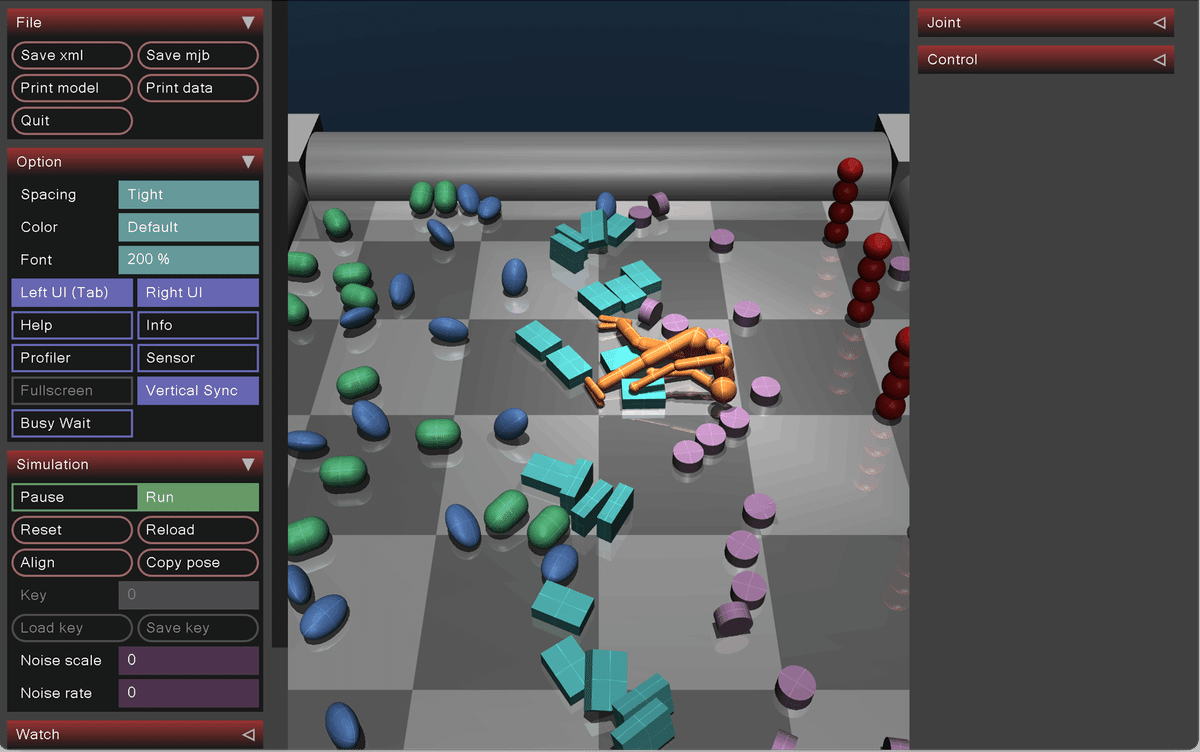
(3) MJCFファイルを画面にドラッグ&ドロップ。
今回は、圧縮ファイルに含まれていた「model/humanoid100/humanoid100.xml」を使いました。
4. MuJoCo Unityプラグインのインストール
次に、「MuJoCo Unityプラグイン」を使ってUnity上で動作確認してみます。
(1) 「mujocoリポジトリ」をクローン。
(2) Unity 2020.2 以降の3Dプロジェクトを作成。
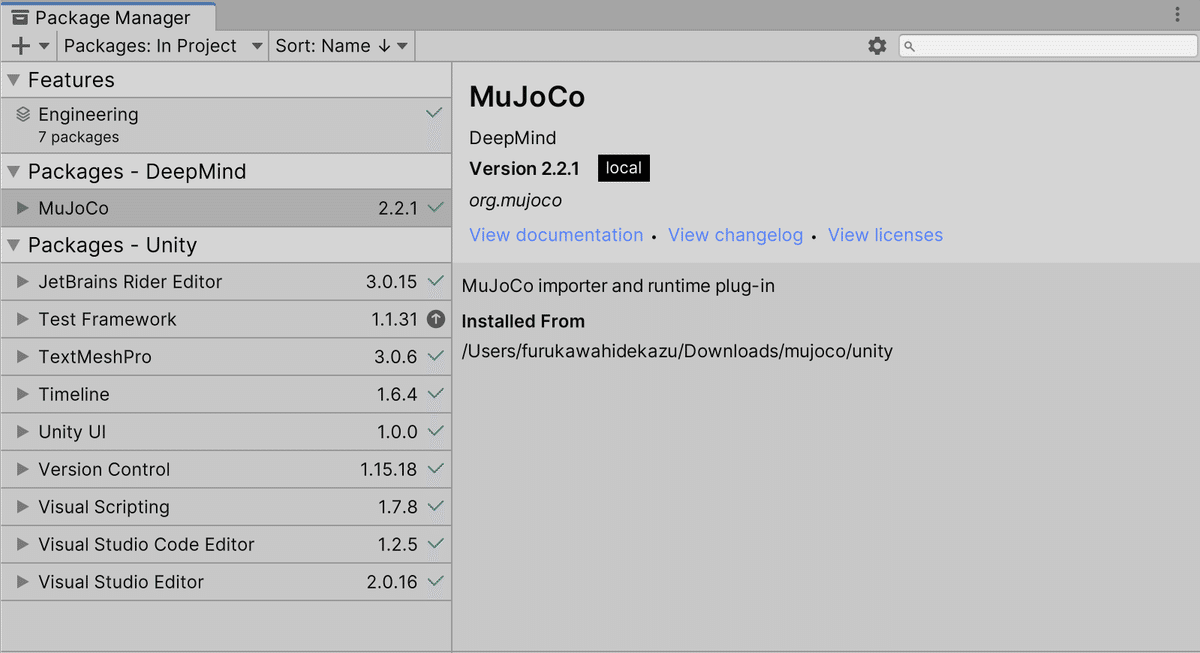
(3) Unityのメニュー「Window → Package Manager → + → Add package from disk…」で「mujocoリポジトリ」の「unity/package.json」を選択して、「MuJoCo Unityプラグイン」をインポート。
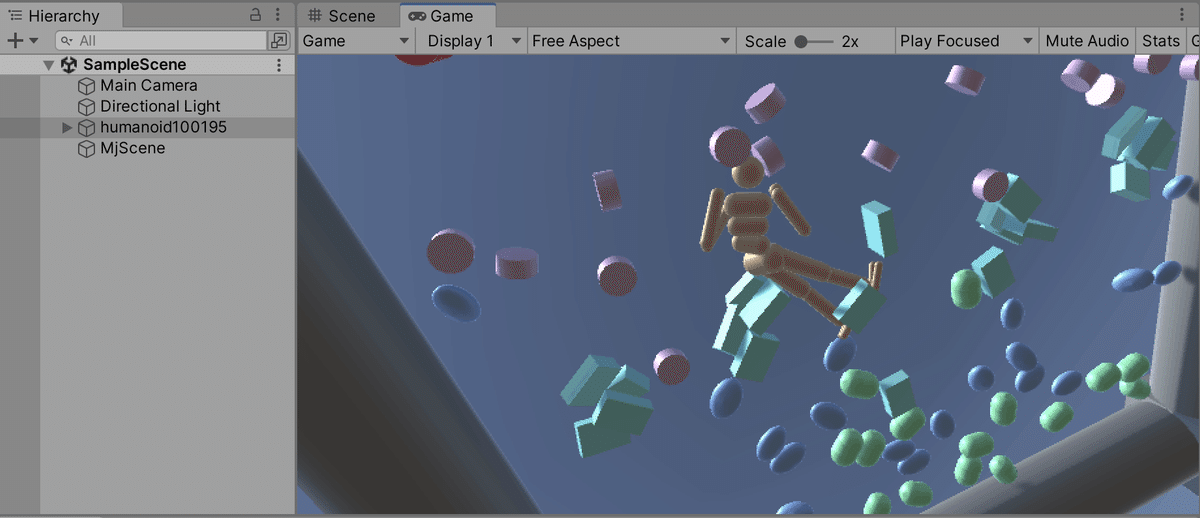
(4) Unityのメニュー「Assets → Import MuJoCo Scene」で、「mujocoリポジトリ」の「model/humanoid100/humanoid100.xml」を選択。
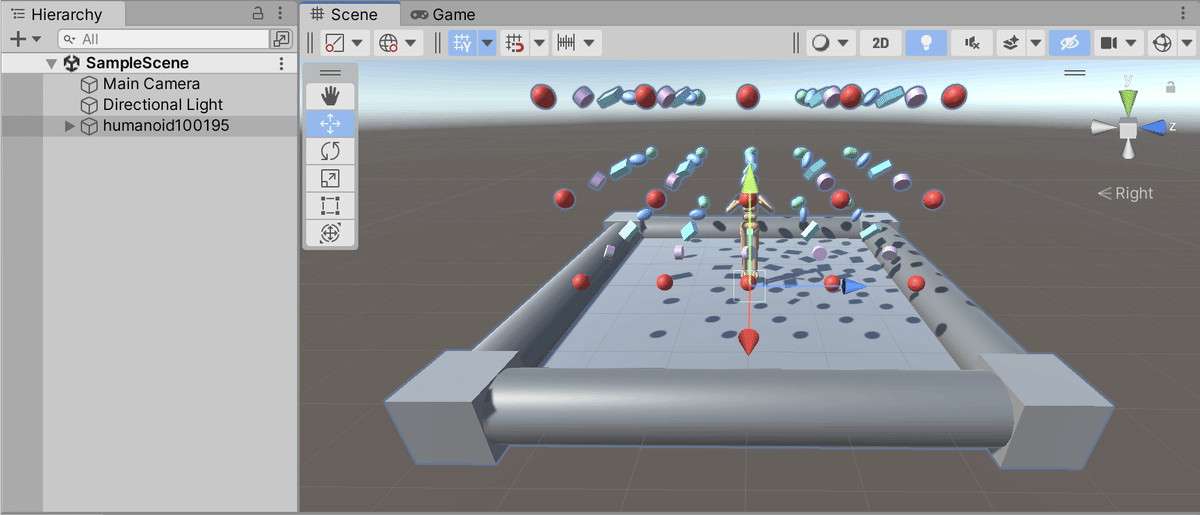
(5) Playボタンで実行。