とある機械技術者のメモ帳
ホーム
記事
マガジン
プロフィール
仕事依頼
月別
ホーム
記事
マガジン
プロフィール
仕事依頼
月別
最新の記事
新着
人気
固定された記事
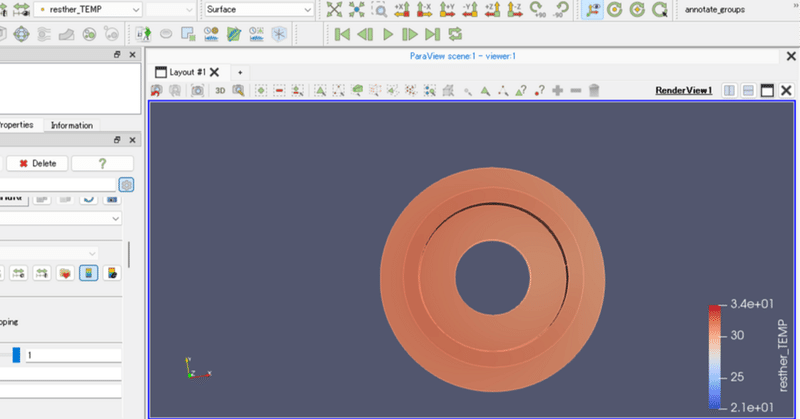
SalomeMecaによるヒータの非定常熱伝導解析
とある機械技術者のメモ帳
2年前
固定された記事
SalomeMecaによるヒータの非定常熱伝導解析
2年前
Salome-Meca2024をWindows11WSL2導入してみた。
とある機械技術者のメモ帳
9日前
Salome-Meca2024をWindows11WSL2導入してみた。
9日前
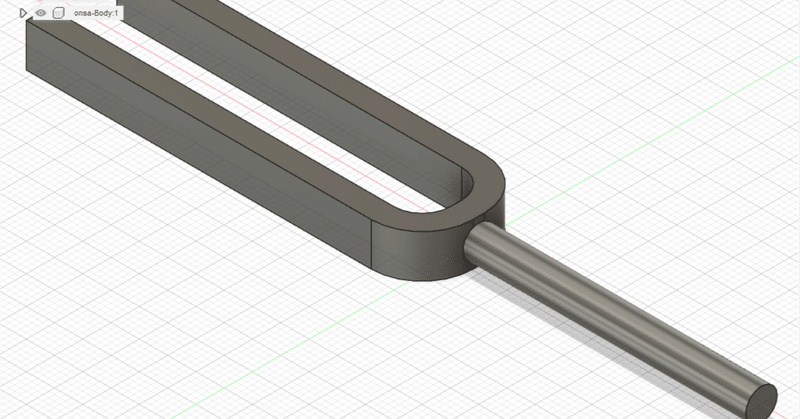
Fusion Simulation Extensionをやってみた:その2 音叉の固有振動数
とある機械技術者のメモ帳
1年前
Fusion Simulation Extensionをやってみた:その2 音叉の固有振動数
1年前
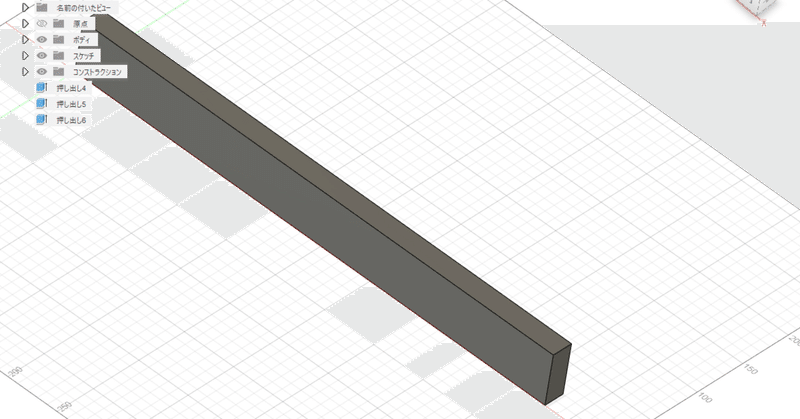
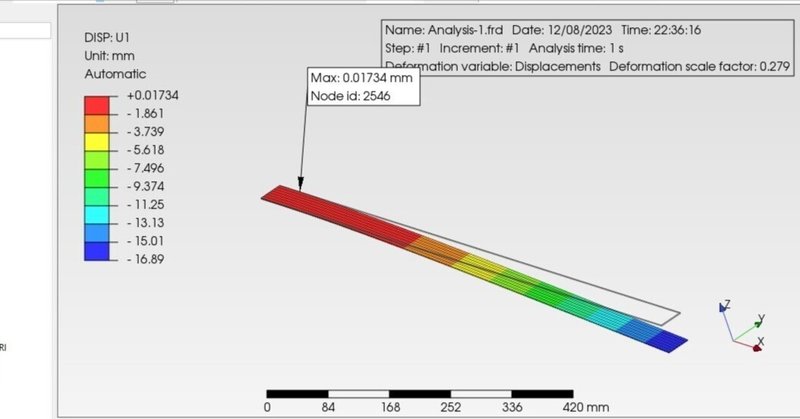
Fusion Simulation Extensionをやってみた:その1片持ちはりのたわみ
とある機械技術者のメモ帳
1年前
Fusion Simulation Extensionをやってみた:その1片持ちはりのたわみ
1年前
定規のたわみ
とある機械技術者のメモ帳
1年前
定規のたわみ
1年前
Joplinによるevernote代替法
とある機械技術者のメモ帳
1年前
Joplinによるevernote代替法
1年前
2自由度のロボットアームの動き
とある機械技術者のメモ帳
1年前
2自由度のロボットアームの動き
1年前
もっとみる
新着
人気
もっとみる
マガジン
CAE関連記事
26 本
デジタルツール仕事活用術
3 本
読書ノート/気になったこと調べたこと
3 本
技術士二次試験対策
12 本
講演資料
2 本