
iot試作どうやるの? 元WEB系エンジニアがやってみた②

こんにちは。リンクス モバイル部所属 石川まさきです。
一年以上前の話を思い出しながら書いているので、解像度が低いのはご容赦ください😉
前回は、お客さんとの話し合いで、どのような形で検討試作を作るか?
まずは完成イメージをフリーハンドで描いてみる段階をお話しました。
まずマイコンに触れる
ハードウェアエンジニアの人と社長が、アルディーノとかアルデュイーノとか、言っていてナンノコッチャわからん🥱
「簡単だから初めての組み込みはアルデュイーノでやればいいんじゃない?」って言われて、定食屋のおすすめを選ぶような感覚で、アルデュイーノを使うことになりました。
Arduinoって何それ?

どうやら会社のあちこちに転がっている、この形をしたものがArduino(アルデュイーノ)らしい😯
これは通称Arduino評価ボードとか、開発ボードと呼ばれていて
PCとUSBでつなぐと、簡単に書き込みが出来る品物らしい・・・
(ググって概要を知ったけど、いまいちピンとこない。)
Lチカ
ハードウェアエンジニアの人と、社長が「最初はえるちかから始めて、慣れていいんじゃない?」って言っていて。
は?えるちかって何ですかね。古代ギリシャ哲学者の名前っぽい事言われましても・・・
とりあえず知らない言葉をググる31歳・・・🔍🤔
えるちか → Lチカ
Lチカとは、LEDチカチカの略である。
PC上でプログラミング言語を使う場合であれば最初に「Hello World」を表示させるプログラムの例が示されることが多いが、ディスプレイがなければ Hello World という文字を表示することすらできないので、代わりにLEDをつないでチカチカと点滅させて動作確認することが多い。
なるほどね、Hello World的なチュートリアルなのね。
わかりました!😊
Arduino IDE(統合開発環境)
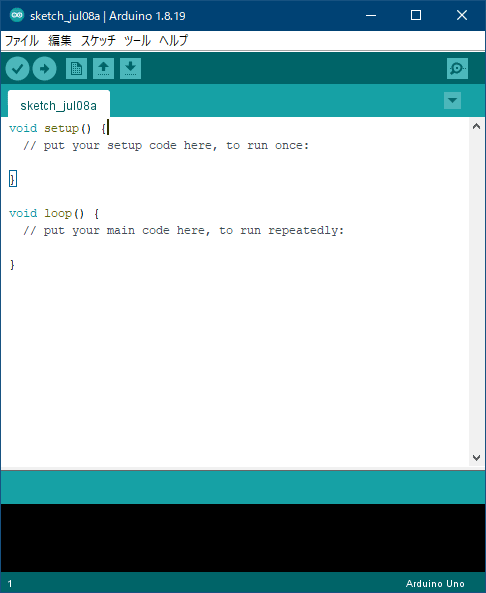
なるほど、Arduino専用のIDEが公式から提供されていてダウンロードしたらすぐ始められるようになっているわけ!確かに簡単!
組み込みもチョロいな😏
デバイスプラスさんの記事を参考に、Lチカを試す。
参考記事はこちら
Arduino(アルディーノ)でお手軽電子工作:LEDを光らせてみる | Device Plus - デバプラ
まぶしいわ!🤩
速攻でUSBぶち抜きました。
Lチカできたぞー!
っしゃーやっと始まったわ!😆🔅
ロードセル
ハードウェアエンジニアの人と社長が「ロードセルでいいんじゃないの?」って話の流れで、お客さんとのWeb会議でセンサーはロードセルを使うことになっていました。
(なにそれ・・・🥱)
とりあえず知らない言葉をググる31歳・・・🔍🤔

ロードセル(Load cell)とは荷重を電気信号に変換する装置。荷重変換器とも呼ばれる。
重さをはかるセンサーで、定番なのが「ロードセル」と呼ばれるものらしい😯
当時は、電子工作を始めようさんの記事に穴が空くほど参考にさせていただきました。
重さを測る その1 20kgが測れるロードセル - Arduinoクックブック
本体
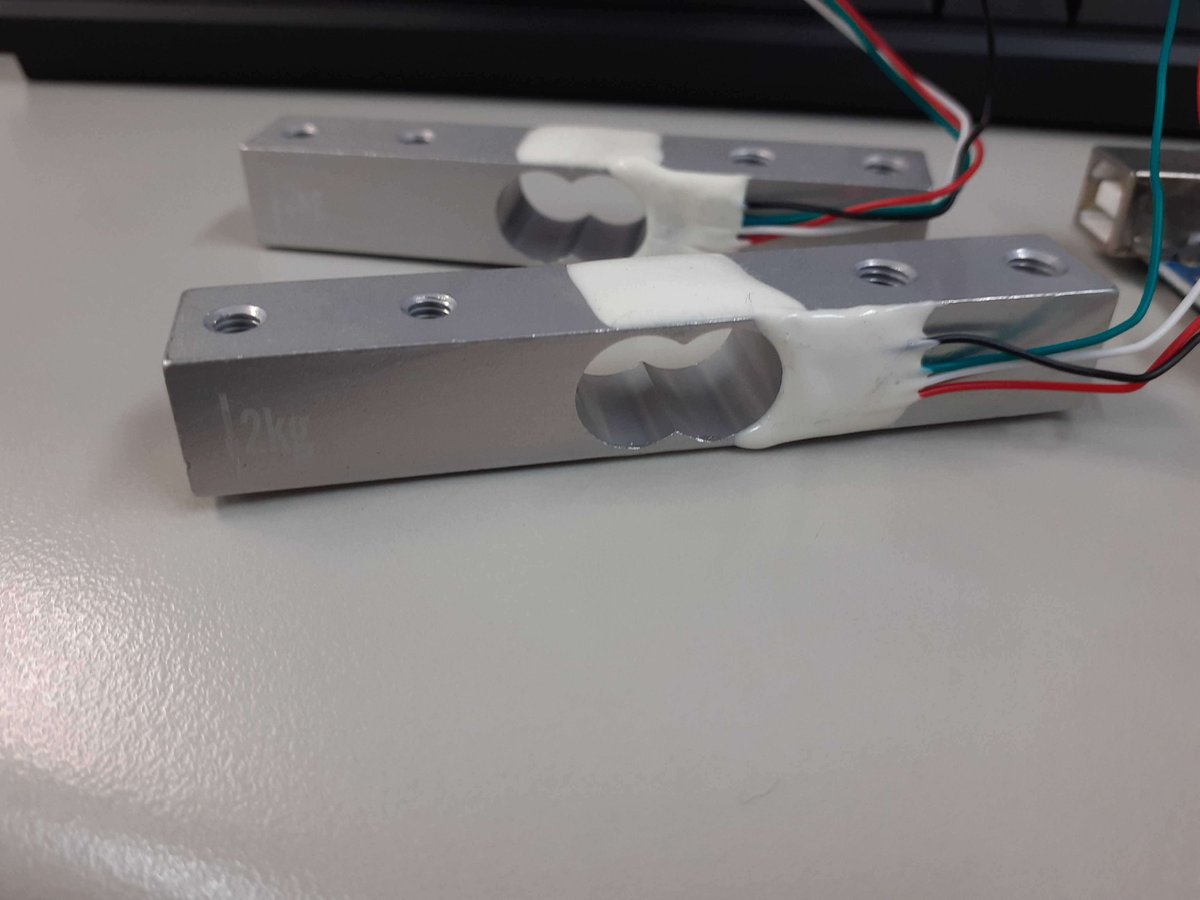
これはひずみゲージ式と呼ばれるもので、白いガムみたいな物の下にセンサーが入っていて、「今、曲がってる!自分曲がってます!😫⚡」って信号を出してくれる。

鉄の棒の真ん中に穴空いてるので、こうやって片方をおさえて、もう片方を押すと
ちょ~っとだけ曲がるんですよ。
前回のイメージで言うと、ロードセルを三脚に固定して、糸をつけてバケツをぶら下げます。
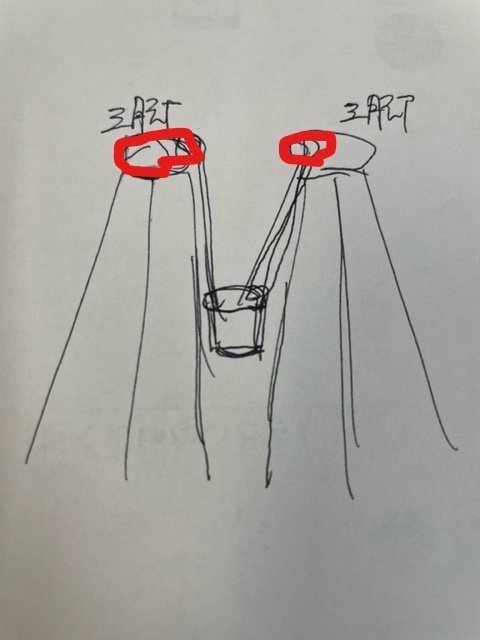
段々と形になってきました😎
コンバータ

ロードセルが出した信号を、Arduinoが理解しやすいように変換してくれるコンバータ(変換器)です。
Arduinoが理解しやすい形に信号を変換してくれる物、人間にたとえると翻訳家ですね。
正直、はんだ付けが下手で下手で・・・😥
肉眼ではピンにはんだがついてるように見えてるんですが、ルーペで確認すると実はついてなかったりして・・・
こういうとこはハードウェアの純粋な難しさだよなー・・・
イメージから形へ
今回の作業で、下書きだったイメージが段々と形になってきました。
しかし、実際に触って動かしてみると当初のイメージをそのまま実現するのは難しく、工夫する点が見つかるのも面白いです!
次回はロードセルを動かしてみて、修正をしたことについて書いてみます!
ここまで読んでいただきありがとうございました!🤗