
事例で学ぶ高校「探究」の教科書(5)

あなたの「やりたいこと」がきっと見つかる
事例で学ぶ高校「探究」の教科書
みんなのギモン編
【特徴】
・「総合型選抜」に使えます。
・自分の才能が見つかります。
・自分軸を鍛えることができます。
某県立高等学校 再任用教諭 テラオカ電子
第2章 「探究」で特異な才能を発揮しませんか?
「動く、光る、制御できるマスコットロボットの製作 ~腕の回転運動の構造検討を軸として~」の探究活動
本章では、特異な才能のある生徒が取り組んだ探究活動を紹介します。どんな特異な才能なのかは、読んでいくと分かります。皆さんも自分の特異な才能を探究活動で発揮してください。そのヒントになると思います。なお、本探究は、2015年度の活動です。
この探究活動は、「マスコットロボット」を製作する活動なのですが、まずは、この「マスコットロボット」とは何かについて説明します。なにはともあれ、実物を見てもらった方が早いので以下の写真を見てください。

写真は、以前の勤務校での体育祭での様子です。各学科の3年生が「課題研究」(職業高校生が取り組む探究学習)の授業でマスコットロボットを製作して、それを中心に学科対抗の応援演技をしているところです。体育祭の午後の部の最初に行われるプログラム(準備があるため)で体育祭のハイライトでもあります。
写真のマスコットロボットは、私の「課題研究」メンバー、生徒8名で製作したものですが、マスコットロボットの土台の台車には、発電機とエアーコンプレッサーが乗せてあります。これを動力としてマスコットロボットが動作します。
このマスコットロボットの製作のリーダーは、優秀な生徒でした。私は、電子・情報を専門としているので、機構設計は得意ではありません。なので、技術的アドバイスをほとんどできなかったのですが、この生徒(仮にY君とします)は、次々とアイディアを出し、機構を製作していったのです。
「課題研究」の授業は、週1回3時間なのですが、Y君らは、授業後も残って製作作業を進めたり、また必要な資材を購入して欲しいと私に申し出てくれたりと、主体的に進めてくれました。
以下で示す彼らの論文では、うまくいかなくても、こうすればよくなるかもと改善活動を何度も繰り返していきました。私が、もうこれぐらいならば良いではないかと言っても(時間があまりないので)、妥協せず、その改善ループを愚直に回したのです。Y君の次々に出す機構のアイディアもさることながら、この粘り強さは特異な才能でした。
では、いつものように、Y君らがサイエンスコンテストで発表した内容を私が代読した形ですが、YouTubeで一般公開しました。以下のリンクから動画を視聴できます。見て頂けると後の話が良く分かると思います。
【テラオカ電子:「動く、光る、制御できるマスコットロボットの製作」(2015)を公開します。】
それでは、生徒たちの探究活動を紹介します。今回は、生徒たちの論文をそのまま引用します。
【0.タイトル】
動く、光る、制御できるマスコットロボットの製作
~腕の回転運動の構造検討を軸として~
【1.はじめに】
私たち電子工学科の課題研究班は、マスコットロボットの製作に取り組んだ。このマスコットロボットの製作は、本校の伝統行事になっている。
今回、私たちは、腕と頭が動き、耳が光り、それを、赤外線リモコンを使って制御できるマスコットロボットを製作した。
本報告では、製作過程について、特に機構構造における何回もの改良の過程を中心に述べる。
【2.目的】
マスコットロボット製作の目的は二つある。一つは本校の体育祭で学科対抗の応援競技として展示するものである。体育祭は、9月30日(水)に行われた。二つ目は、「市内のまつり」のパレードに参加するものである。「市内のまつり」のパレードは、10月18日(日)に行われた。どちらも多くの方に披露できるのでやりがいがある。
なお、本製作において、腕と頭を動かし、耳を光らせる制御には、赤外線のリモコンを使った。この赤外線のリモコンの開発は、本校の電子情報工作部の協力で行われた。電子情報工作部で開発した「孫が作る高齢者向け電子ゲーム機器」のハードウェアとソフトウエアを参考に、ハードウェアとプログラムの変更を行い製作した。
補足:
制御については、私が指導したわけですが、こうなってしまった経緯については、最後に述べます。
【3.製作過程】
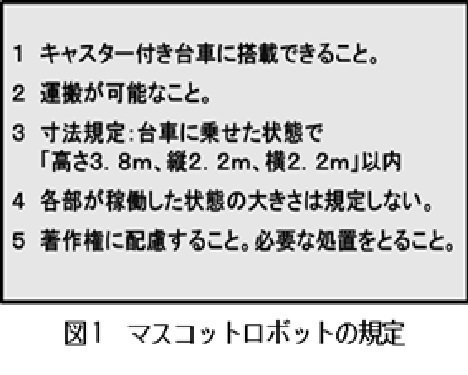
3-1 マスコットロボットの規定
マスコットロボットの大きさ等の規定を図1に示す。この規定の中で最大限のパフォーマンスを出さなければならない。
3-2 デザイン案
はじめに、キャラクターのデザインをグループで決めた。議論の結果、写真1のような子ザルにした。次にこのキャラクターの構造案を画用紙で組み立てた。写真2に完成した画用紙の模型を示す。右腕を上げることができる構造である。なおマスコットの名前は、「スローロリス君」とした。

3-3 構造製作過程
体格の骨組みを組んだあと、腕を上げる構造の製作に取りかかった。当初ローテータを使って動くものを製作した。写真3にその構造を示す。しかしながら、腕の重量が重いために持ち上がらなかった。これは、ローテータの可能トルクよりも腕の重量によるトルクが大きかったためである。
そこで動力をローテータからエアーシリンダーに変更した。エアーシリンダーの直線運動で腕を上げるという回転運動に変換する機構を考案した。製作した構造を写真4に示す。
しかしながら、腕を上がることができたが、何回か動作させると腕が折れてしまった。そこで、構造を補強した。補強した様子を写真5に示す。図2に動作原理図を示す。腕の片側を蝶番で固定し、エアーシリンダーで腕を持ち上げる構造である。しかし、実際に動作させると、動きが安定しないので、小さいエアーシリンダーを加え二本のエアーシリンダーでの構造に改良した。構造図を図3に示す。腕を上げる時は、大きいエアーシリンダーで押し出し、同時に小さいエアーシリンダーでワイヤーを使って引っ張る構造とした。写真6に製作したものを示す。こうして安定な動作を確保した。こうして、動作もなめらかになり、力強い動きをだすことができた。
頭の持ち上げは、小さいエアーシリンダーで行った。こちらも、当初、実際に動かすと、エアーシリンダーを受ける板が折れてしまったので、エアーシリンダーの固定を強固なものにした。改良後の構造を写真7に示す。また、頭が落ちる際の衝撃を緩和するために、衝撃吸収シートを貼り付けた。この様子を写真8に示す。
補足:
このように書いてあると、順調に改良が進んだような印象を受けると思いますが、当時の私は、うまくいくのかどうか、心配でしょうがありませんでした。体育祭の日が迫ってくるなか、見通しがつかない状況で焦っていました。その一方で、Y君らは、余裕で楽しんで取り組んでいたのです。これを見て私は、これこそが「才能」だと感じました。


3-4 制御製作過程
制御の電気配線ブロック図を図4に示す。リモコンからの信号を受けて、腕、頭のエアーシリンダーと耳のLEDをリレーを使って動作させる。リモコンと制御回路の製作の様子を写真9、10に示す。耳の点灯は、2色のLEDを組み合わせて配置し、リモコンから耳の点灯コードが送られると、1秒間隔で4回点灯・消灯を繰り返す。エアーシリンダーの制御は、リモコンでトグル動作をすることができる。完成したリモコンとコントローラーを写真11に示す。

3-5 外装製作過程
外装は、金網で形を作り、それに麻布を巻き、その外側に綿を乗せた。最後に塗装をした。その様子を写真12、写真13および写真14に示す。

【4.完成作品】
4-1 外観
体育祭で披露したマスコットロボットの外観を写真15に示す。当初のモデルの写真と同様にかわいいものが完成した。
4-2 制御
腕と頭が上がった状態を写真16に示す。リモコンで簡単に制御できる。

【5評価】
5-1 制御評価(赤外線通信)
赤外線の送信方向と受信方向の軸が一直線であれば、2m離れた場所でも制御ができた。また、屋外でも遜色なく制御できた。
5-2 腕の構造
腕の上げ下げを繰り返し行ったが、故障することなく動作した。エアーシリンダーを二本使用し、押し出しと引っ張りを行うことで、無理のない動作が可能となった。腕の動作範囲の角度は、約100度である。
【6.まとめ】
本研究は、マスコットの製作過程を述べたものである。特に腕の動作に関して、多くの試行錯誤があった。製作しては、動作確認し、その様子を注意深く観察し、対策を検討した。最終的に無理なく動作するものが完成できた。
本来、製作は、きちんとした設計図を描いた後、設計図を通りに製作するのが基本である。しかし、今回は、製作コストを抑えるため、校内にある材料、素材を使って試行錯誤して製作を進めた。その活動の中で、思いもよらない組み合わせや、形状を作ることができ、ものづくりを楽しむことができたことはよかったと思う。
謝辞
本研究にリモコン技術を提供して頂いた、電子情報工作部のみなさんに深く感謝致します。「市内まつり」のパレード参加にあたり、市役所の運営スタッフの皆様に深く感謝します。また、製作にあたり、有益なアドバイスを賜りました、本校の先生方に深く感謝致します。最後にこのような研究の場を提供していただいている、AITサイエンス大賞に深く感謝申し上げます。
(参考文献)
(1) 髙橋、髙橋、多葉田、松崎、松原、松山:『動くマスコットロボットの製作』第12回AITサイエンス大賞 研究発表論文集 第12号 平成25年度 AIT愛知工業大学
(2) 「電子工作のテスト工場『PICで赤外線通信』」
http://amahime.main.jp/sekigaisen/main.php?name=sekigaisen 2015年8月26日閲覧
本探究活動のまとめ
Y君ですが、卒業後は、デザインを学ぶ専門学校に進学されました。もともと、絵やイラストや漫画を描くのが得意な生徒でした。卒業後、当時の担任の先生から、何かの賞を取ったという話を聞きました。今では知る由もありませんが、引き続き自分の夢の「探究」をやっているのではないかと思います。
彼の特異な才能は、絵や機構設計のセンスがいいこともありますが、私は、問題があっても楽しんで、色々なアイディアを試していく心構えや思考にあると感じています。
では、このような才能は、私も含めて、凡人に獲得できるものなのでしょうか? 生まれつきの遺伝子で決まっているから無理だと言われてしまえばそれまでですが(半分は決まっているそうですが)、でも残りの半分は、環境や努力とも言えます。かつて、アリストテレスは以下のように言っています。
人より優れた才能というものは、それがなんであれ、ただ訓練を繰り返し、それを日常の習慣にしてこそ初めて得られるのである。美徳を備え、優れた存在だから正しく行動できるのではなく、むしろ反対に、正しく行動するからこそこうした資質が身につくのである。日々何を習得していくかで人間の資質は決まるのだ。卓越さとは、特別な能力でなく、一つの習慣的行為なのである。
Y君もきっと普段からの努力があったからこそ、この「余裕」の姿を示したのだと思います。人生に退屈している場合ではないのだ。
さて、この探究活動の成果は、サイエンスコンテストでも発表しました。そこでの講評コメントは、以下の通りでした。
いろいろ工夫しながら、マスコットロボットの製作に成功したことは評価に値する。ただし、論文として考えた場合は、ロボットの詳細な仕様の記述が抜けており、もっと定量的な評価なども必要である。論文は、他の人が読んで同じようなものを作ろうとした場合、参考に成るかどうかが重要であり、同じことを再現できるだけのデータの提示が必要である。そのためにはまず、使用したアクチュエーターの基本仕様(トルク/出力、ストローク長、エアーの圧力等)、腕の重さ・長さ等の記述が必要である。また、シリンダーの取り付けの具体的な位置なども重要だが、それらの記述が無い。さらに、実際どれだけの出力があれば十分なのかを計算し、実験結果と比較したりすることにより、エアーシリンダー1本ではだめなのが2本でなら大丈夫なのはなぜなのか等を議論できるともっと良い論文に成るであろう。この論文では、2本という構造的な事が安定化に重要なのか、それとも2本にすることによる力のアップが重要なのかがわからない。やってみたらできましただけでなく、なぜ良く成ったのかを考えることが重要である。
まったくその通りでして、実際は、「作るので精一杯でした」という探究活動でした。この記事を読まれる皆さん、参考にしてください。探究活動には「余裕」がないといけません。
今回はここまでです。次章、第3章では、「学校の制服の選び方」の探究活動を紹介します。
(追記)
最後に、この探究活動での嫌なことも述べておきます。この勤務校でのマスコットロボットというのは、体育祭で行われる学科対抗の応援演技で披露するものだと冒頭で述べました。これは、学校の伝統行事です。したがって、マスコットロボットの製作は、毎年製作している訳ですから、0(ゼロ)から作るのではなく、学科には過去から引き継いだ部品がストックされており、それを再利用して製作していきます。例えば、土台となる台車や、発電機、エアーコンプレッサー、エアーシリンダーなどの備品、胴体に使える溶接された枠組も残してあります。そして、その中には、エアーシリンダーを制御するリレーが多数実装された制御基盤もありました。
当時私が所属していた学科では、この大変なマスコットロボット製作という「課題研究」を教員が順番に担当するようになっていました。この年、幸運?にも私の番だったわけです。
製作が始まってしばらくたったとき、以前に学科にいた教員で、今は別の学科に移った方が、実習室に来られて、「これもらっていくよ」と言って、制御基盤を持っていったのです。昨年度、この制御基盤を自分が使って、何かしら改良を加えたのかもしれませんが、私の学科でもマスコットロボットを作っているわけですから、当然、制御基盤は必要です。これには、あきれましたが、返せというと喧嘩になってしまいますので、仕方がないので、自分たちで作ることにしました。
当時、私は、電子情報工作部という部活の顧問もやっていて、高齢者向けの電子ゲームを作っていました。そこで、作っていた電子ゲームを改良して使うことにしました。これが、論文で紹介した赤外線リモコンでの制御です。ハードウェアは、新たに作る必要がありましたが、プログラムは、ほとんど転用できましたので、この難局をうまく回避できました。探究活動には様々な困難が待ち受けていますが、工夫して乗り越えていきましょう。
いいなと思ったら応援しよう!
