
なんでもロボットで掴める時代がすぐそこに!?【ロボットハンド】に迫る!

人を傷つけることはできないようになっています(ベイマックス))
ロボットが優しさを持ち始めたらいよいよロボットと人間の境目が曖昧になってきそうですね。笑
こんにちは。
冒頭にもあった、ロボットが優しくなるとしたら皆さんどう思いますか?
いきなり優しくなることはないですが、人間の感性を通じた行動を模倣することによって擬似的な「優しさ」を持った行動は再現できるかもしれませんね。
モノを掴む際にも、一つの優しさが表れているのではないでしょうか?
今日はピースピッキングロボットの中でも最重要と言っても過言ではないロボットハンドについてご紹介します。
人間の手の代わりに働くロボットハンド
まず、ロボットハンドがどこを示すかを明確にしておきましょう。ロボットハンドとは下記の図でAの部分になります。
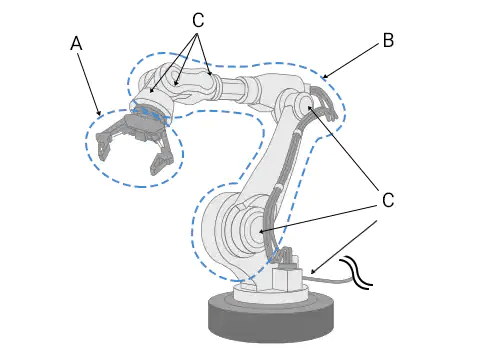
人間で言うと「手」の役割があり、モノを掴む作業をロボットハンドで行います。
ロボットハンドには、人の手の構造や大きさを模倣した指または爪で対象物を掴むもの、商品の天面から真空吸着や磁石で吸着するものがあります。
またロボットハンドはしっかりと握るなど強力な力を発揮する一方で、傷付きやすい物を傷付けずに優しく掴むといったこともできます。
通常、ロボットハンドは対象物の重さや形状、硬さや材質などに合わせて専用に設計します。そして、指や爪は電動・空気圧・油圧・機械的動作を応用した力で動作します。
ロボットハンドには大きく分けて2種類あります。
<把持ハンド(グリッパータイプ)>
指や爪で対象物を挟んで掴むロボットハンド。2本指掴みや3本指掴みがあり、大きい対象物を掴んだり抱えたりする4本以上の爪や指があるタイプもあります。


<吸着ハンド(サクションタイプ)>
対象物を吸着するロボットハンド。吸着には真空吸着や磁石が使われます。

これらのハンドタイプを分けながら、実際に商品をつかんでいくわけです。それでは、各タイプの特徴を見ていきましょう。
把持タイプ:ロボット加減速でフラつかない
まずは把持タイプから。下記の動画にあるように、2本指や3本指など指数の違いはあれど商品を手の指のようにつかんでいきます。
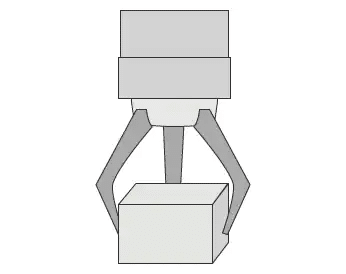
こちらはなんと言っても把持後の安定性が強みです。人間もしっかり持とうと思ったら指を駆使して商品を安定してつかみますね。
把持タイプでは、2点以上をしっかりとつかんでいるためアームの加減速で商品がふらつくことがなく、商品自体にダメージを与えることがほぼないと考えられます。
メリットとしては重い商品などは把持がお勧めでしょう。特にロボットが掴んだ後動かした際に安定していないと商品がぐらぐら揺れて不安定になります。ただし、形状はなるべく掴む場所2点以上がハンド内に収まるサイズであること。こういった形状制約が発生することでデメリットとしては対象商品が限定されます。
吸着タイプ:多くの商品に対応
エアを利用し、真空パッドで吸着させて商品をピックアップ・移動させるロボットハンドです。
真空パッドによる吸着では、真空発生器で真空を発生させ、真空パッドに対象物を吸着させて運びます。対象物の表面に穴が開いていたり、球体のような表面でなければ、材質を問わず吸着できます。
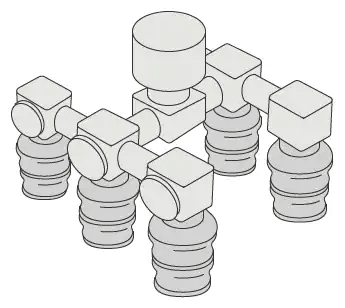
また、吸着部分を下記のように増やすことで一様に平面でない商品も吸い付けることが可能となります。

メリットとしては多くの形状に対応できる一方で、ハンド吸着部分を蛇腹型のような伸縮タイプにすると、ロボットによる加減速で商品自体が大きく揺れ、不安定なだけでなく最悪商品自体に破損等ダメージを与えてしまうことが想定されます。
ハンドチェンジャーによるいいところどり
そんな2タイプのロボットハンドですが、近年はハンドチェンジャーと呼ばれる二刀流も登場してきています。
ロボットを活用する際、物体其々に専用ハンドを作った場合、ハンドの持ち替えをすることで、ロボットピッキングができる対象が増えます。この持ち替え作業のことを、ツールチェンジといいます。

ツールチェンジには色々なタイプがあります。例えばこちらのタイプは3本指と吸着型のハンドチェンジャーになります。

こういった「どちらか」だけでなく「両方搭載」のようないいところどりが現時点でのベストアンサーになりそうです。ハンドチェンジャーを導入する際には切り替え時間などのタクトタイムを見ながら、生産性に影響がないかを検討していく必要があります。
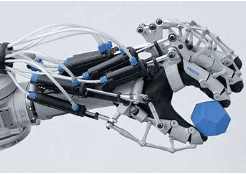
最終的には人間の手を完全模倣
今回はロボットハンドについてご紹介しました。ただ、これはロボット技術側からのアプローチであり、現実問題、人間は手で取れている、という事実を鑑みると最終的には「人間の手を完全模倣」がなされると完全自動化ができるかと思います。
5本指だけでなく、触覚や掴み方など多くの点において数値化をし、その数値を持って再現をしていく、ことになるでしょう。
そんな未来を妄想しながら、最後はそんな未来にワクワクする動画を載せておきます。ではまた。
この記事が気に入ったらサポートをしてみませんか?