
自作機紹介 小型シールド機の変遷 その1

今回は自分がかわさきロボット競技大会で優勝を目指すなかで、特に極めようとした小型シールド機体の過去から現在への改良、変遷について機体紹介をしつつ書いていこうと思います。
かわロボに参加し始めた2011年頃は、当時猛威を振るっていた回転シールド機体を真似して製作し使っていました。

ですが、ノウハウや技術も足りず、このままでは勝つことはできないなと感じ、別の戦い方を模索することにしました。
当初の流行の回転シールドのような ”一撃必殺” ではなく
”小さいボディで相手の攻撃をかわし、凌ぎ、耐え
何度も復帰し勝利をつかみ取る”
をコンセプトとし、作り始めました。
赤兎(セキト) 2012年11月頃製作
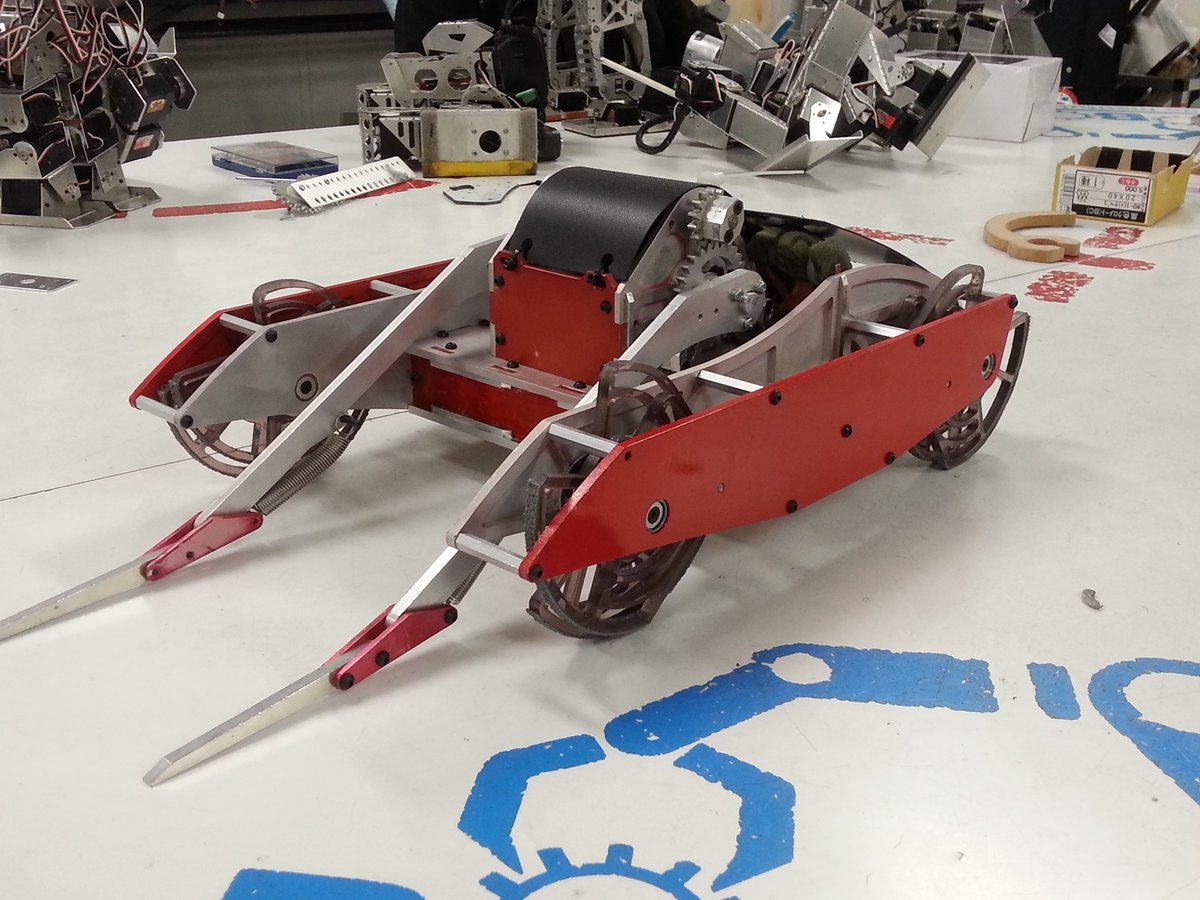
【スペック】 ※()内はアームを含めたサイズ
全長 342mm (450mm)
幅 240mm
全高 137mm (380mm)
アーム: 回転直動 ギア比250:1 モーター3発 (タミヤギアヘッド)
脚回り:3層カムスライダーヘッケンリンク ギア比36:1
モーター左右 各1発(タミヤギアヘッド) ベルト伝達
ホイールベース 225mm カム半径10mm カム中心から地面45mm
最初に試作したのが赤兎
当時はサスペンションもなく、アームも2本のロッドアームでした。
ボディも固くとても跳ねるものでしたが、復帰の速さは可能性を感じさせてくれるものでした。
サスペンションの必要性と、相手を狙うのにアームは1本のほうがやりやすいと感じて改良した機体が次
黒鯱(クロシャチ) 2013年6月頃製作

デザインは過去イチ気に入ってたりする
【スペック】 ※()内はアームを含めたサイズ
全長 347mm (474mm)
幅 239mm
全高 142mm (365mm)
アーム:台形リンク ギア比250:1 モーター4発 (タミヤギアヘッド)
脚回り:3層カムスライダーヘッケンリンク ギア比25:1
モーター左右 各2発 ベルト伝達
ホイールベース 229mm カム半径10mm カム中心から地面45mm
前2脚に直動回転サス搭載
(アームに台形リンクを採用。アームにリンクを追加するルールが追加された初年度で、回転→揺動→回転すら許されたガバガバルールだったので、可動域と減速をほとんど変えない仕様になってます)

相手に潜りやすいように全体的に低いデザインと、
主な改良点は
・機動力を確保するために脚モーターを各2発にし、前脚をサスペンションに変更。
・アームを中央1本に集中し精度と突破力を向上
・アームの振りすぎでの破損を防ぐためにダイオードを使ったリミットスイッチを搭載(ちなみに私は電気電子関係は現在でもにガバガバのド素人レベル)
・全体的なフレーム強度up
・脚モーターの発熱に自作ヒートシンク
等々

本大会で初めて 下剋上 の名前で出た機体になります。
本大会へは2度目の参加で、第20回かわさきロボット競技大会での戦績は
決勝トーナメント1回戦敗退 ファイティング賞受賞
立命館大学の横回転アームの名機、鎬と戦い敗退しました。
この年での本大会や大学祭回りで勝率は上がり少しづつ戦果はでてきましたが、どこでも優勝には届かず。
長物のロッドをいなしたり、横回転の鎌を弾く、回転シールドの脚をすくい上げる際にロッドでは厳しく、脚の速度も足りない。
フレームも1年通して戦うと、どうしても曲げられることや穴が開くこともしばしばあり、
・故障してもすぐに修理できるメンテナンス性
・他の機体により広く対応するためにアーム形状の換装
・より走破性とスピードを向上させる
ことを改良点としました。
猿暴々(サルボボ) 2013年12月頃製作

スペックは割愛
次の機体への中間試作機といったところ。
アームもルールの改定につき4節リンクに変更とシールドも試作
サスペンションは無し。この機体を作ったころでおおまかな仕様が詰めれた形となります。
ちなみにこのころまでは↓のような滑り止めテープを脚裏に使ってました。
グリップするのはいいのだけどクッション性が全くなく跳ねる、テープなので接着が弱ると一気に剥がれるという仕様でした。
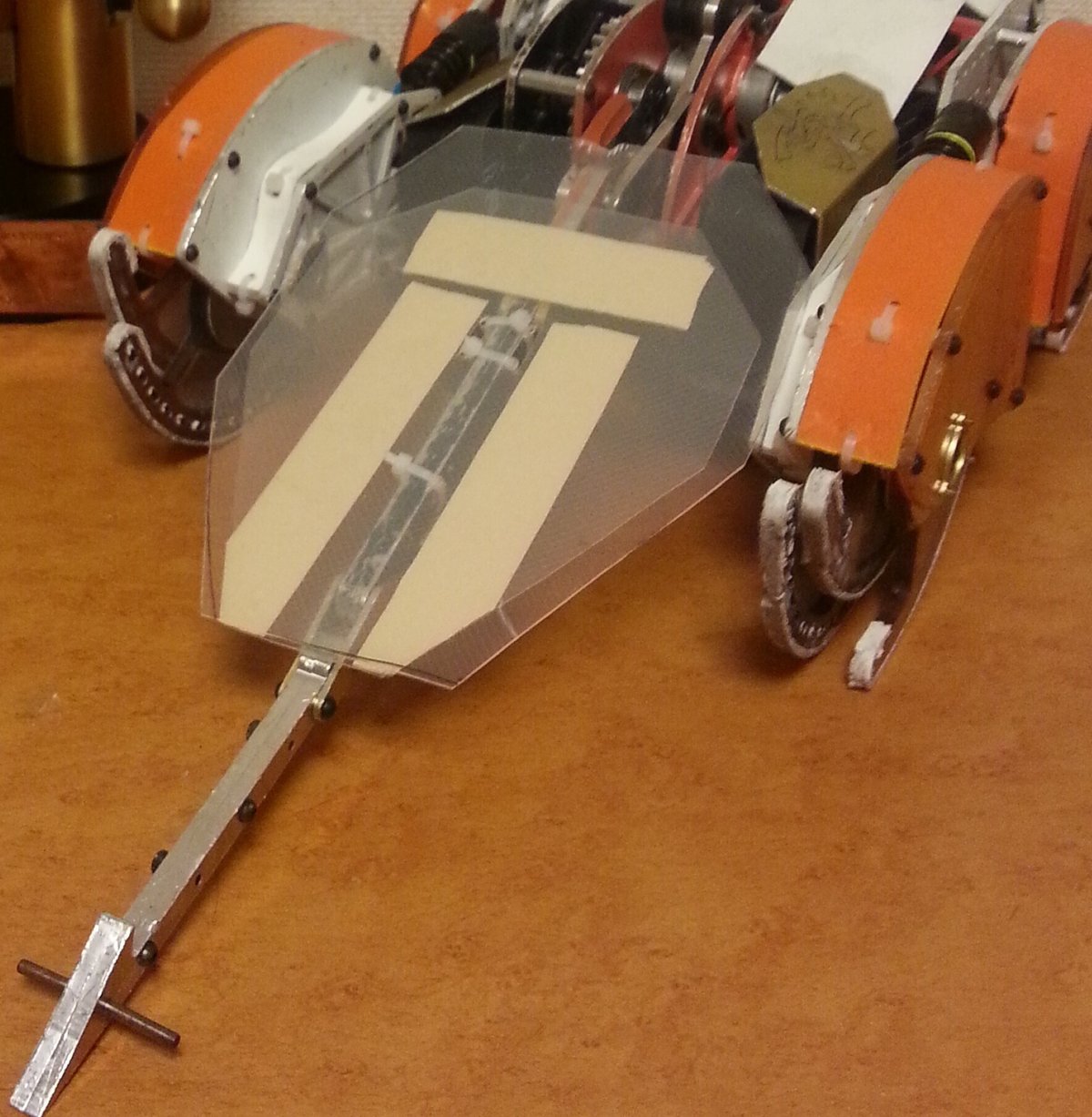
雷火(ライカ) 2014年6月頃製作

【スペック】 ※()内はアームを含めたサイズ
全長 336mm (540mm)
幅 248mm
全高 129mm (426mm)
アーム:4節リンク ギア比200:1 モーター4発
脚回り:3層カムスライダーヘッケンリンク ギア比24:1
モーター左右 各2発 ベルト伝達
ホイールベース 206.5mm カム半径10mm カム中心から地面60mm
前2脚に直動回転サス搭載
主な改良点は
・脚を回転中心から地面から45→60mmと大きくし走破性UP
・足をシリコンシーラントにし、グリップとクッション性のUP
・ロングロッドをいなす&回転シールドの脚をすくい上げる為シールド化
かつ相手がシールドの際は先端が細いロッドに換装し下を取りやすく
・タミヤギアヘッドの廃止とギアの強度upに伴いリミットスイッチの廃止
・揺動リンクルールにの変更に伴い4節リンクに変更
・脚ユニットをプーリーの接続部に六角軸を採用し、交換性の向上
等々
このころから、”回転シールドに殴られても壊れない強度” というのはあり得ないと判断し、
”機体の内部にはダメージが届かずすぐに修理できるような構造” をコンセプトにしていきました。
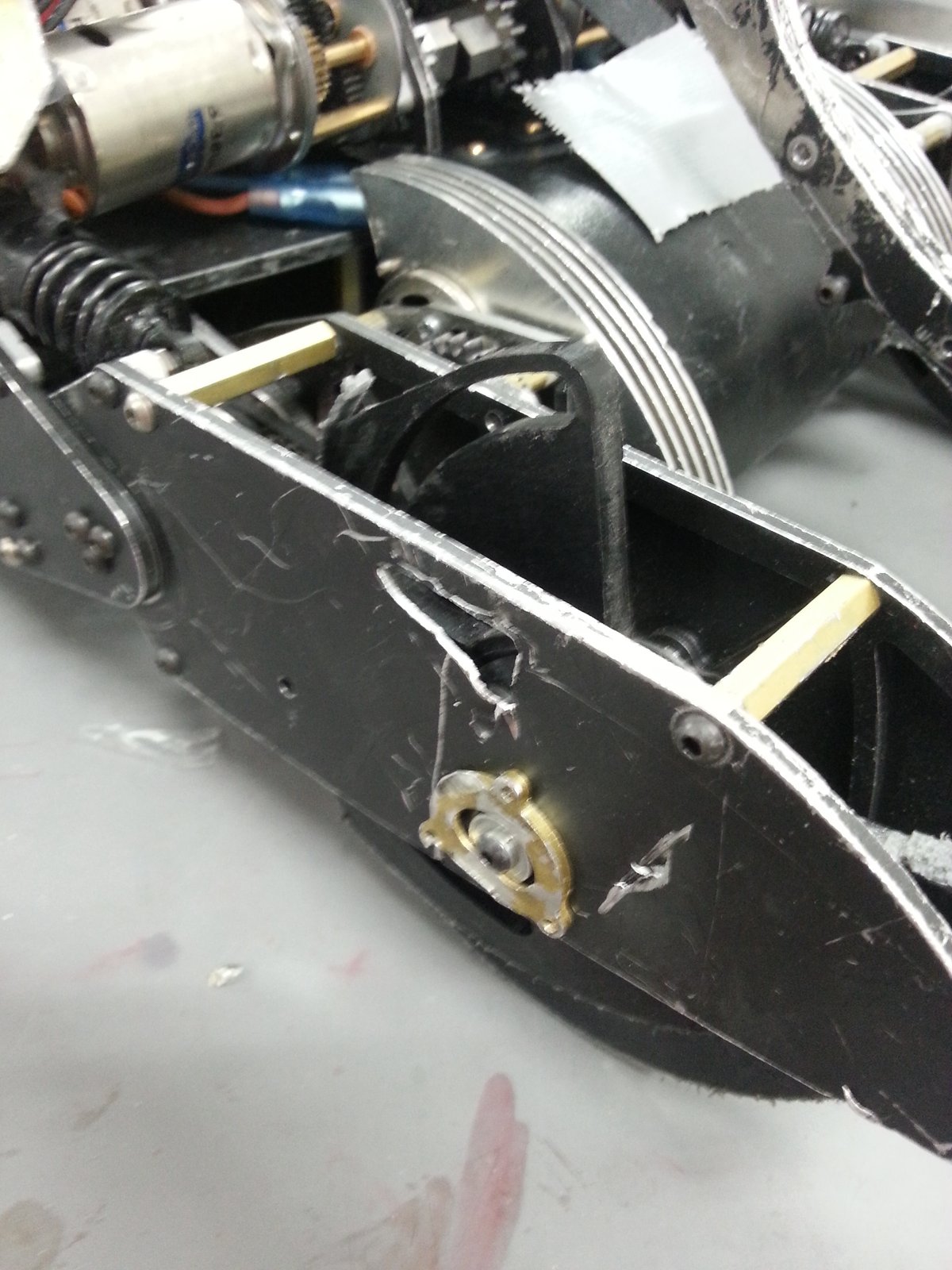
脚および最外部の外装にはポリカを採用しあえて弱くし、基幹部はyh75を使い強固に設計、吹き飛ばされてもすぐに交換できるように予備のフレーム及び脚ユニットを複数用意していました。
脚とプーリーの接続に関しても動力の伝達にヒロスギ計器の六角軸を採用することで、外装フレームを外せば抜き差しするだけですぐに予備ユニットに交換できるようになっています。


(なお稀にロックしたり無理に回すと軸側がずる剥けになります)


シリコンシーラントで成形した脚はクッション性やグリップも向上し、
大きくした脚と相まってスピード、走破性が大きく向上しました。

シールドは先端細さを調整した数種類と
シールド系統の下を取りやすいようロッド形状のものを相手に合わせて換装して使用。
回転シールドに叩き割られることは日常茶飯事だったので多数予備を用意。
換装アームのアームの形状やシールドの修復の話はまたそのうち纏めて記事にでもする予定なのでその際に…

アームには4節リンクを採用
以前と比べシールドの可動域を多くとれるため確実な復帰が可能。
このリンクやリンク比は2023年現在までも採用時からほとんど変えておらず使い回してます。
(当初はリンクや出力軸が折れたのでその辺は年々改善させてるけど)



小型機故に余った重量は底板に重りを仕込み、少しでも低重心になるように調整していました。

スペースの都合、ヒートシンクを廃止し代わりに背面に通気口を用意し発熱対策

第21回かわさきロボット競技大会に 下剋上・改 の名前で出場し
念願の優勝を勝ち取ることができた機体となります。
元々はショートロッドでしたが、上記の紆余曲折をえて今の原型となる小型シールドの基礎ができあがった形です。
これ以降も小型シールド機とし改良、進化を続けるのですが今回はこの辺にて。
このペースだと最新の小型シールド機体まで全3回ぐらいの記事になりそう…
ではまた次回