
回転と射影で学ぶ線形写像(1)

線形代数で登場する重要な概念に線形写像というものがあります。回転と射影の2つの具体例を通して線形写像の概念に触れてみましょう。
2つの具体例
回転
まずは比較的考えやすい180度回転から見て見ましょう。図のように、2次元ベクトルを原点を中心に180度回転する変換は$${(x,y)}$$を$${(-x,-y)}$$に移す変換と言い換えることができます。

次に、2次元ベクトルを原点を中心に90度回転する変換を考えてみます。これは合同な三角形に着目するなどして、$${(x,y)}$$を$${(-y,x)}$$に移す変換であることがわかります。

さらに様々な角度で回転させることを考えてみます。例えば30度回転や45度回転は$${(x,y)}$$をどのような点に移す変換と言えるでしょうか。90度や180度に比べるとだいぶ難しいのではないかと思います。この問いは後で改めて考えることにします。
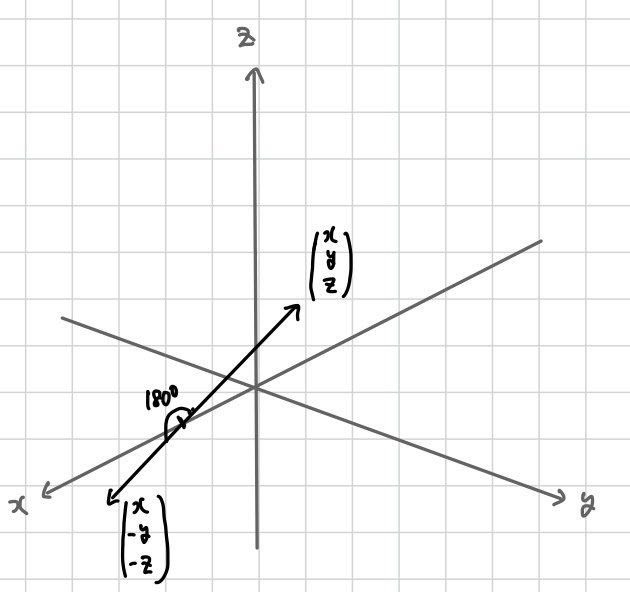
さらに3次元ベクトルについても回転変換を考えることができます。$${x}$$軸に関する180度回転などがそれにあたります。これは$${(x,y,z)}$$を$${(x,-y,-z)}$$。より一般に適当な原点を通る軸と回転角を定めることで回転の方法が与えられます。これも一般の場合に$${(x,y,z)}$$がどのように移されるかを考えてみたいですが真っ向勝負は難しそうです。
射影
ベクトルを別のベクトルに移す方法をもう一つ紹介します。図のように原点を通る直線$${l}$$を考え、2次元ベクトルに対して、このベクトルから直線$${l}$$におろした垂線の足に対応するベクトルを対応させる変換を直線$${l}$$への射影といいます。正射影とか直交射影とかいうこともありますが、この記事内で区別する必要はなさそうなので単に射影と呼ぶことにします。
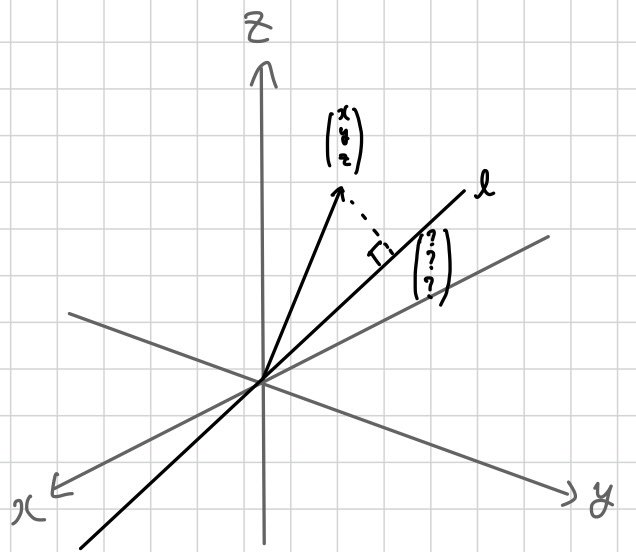
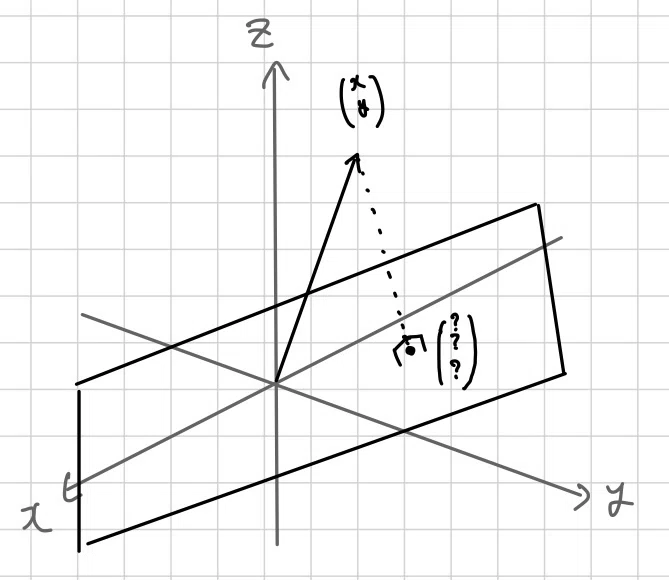
3次元ベクトルについては直線$${l}$$に対する射影の他に平面$${H}$$への射影も考えられます。ただし、後の都合上$${l}$$,$${H}$$としては原点を通るものを考えることにします。いずれも与えられた3次元ベクトルを$${l}$$や$${H}$$におろした垂線の足に移すような変換です。
これも$${(x,y)}$$がどのようなベクトルに移されるかを明示的に記述するのは大変そうです。

共通する性質
点の変換方法を2種類(細かく分けるなら回転(2次元、3次元)と射影(2次元、3次元直線、3次元平面)で5種類)紹介しました。一見すると点の変換であるということ以外に共通点が考えつきにくいかもしれませんが、例えばいずれの変換も「原点は動かない」という共通点があります。原点中心の回転によって原点は動かないし、原点を通る軸に対する回転を行っても原点は原点のままです。射影についても直線$l$や平面$H$を原点を通るものにしているので、原点は変換しても原点です。このことを式で表現すると$${f(O)=O}$$となります。
共通点は他にもあります。2つのベクトル$${a,b}$$とその和として得られるベクトル$${a+b}$$を考えてみましょう。$${a+b}$$は図形的には矢印をつなげることで得られるベクトルです。これらのベクトルをそれぞれ回転したベクトルと合わせて6つのベクトルをまとめて図示したものが下図です。
和$${a+b}$$を回転したベクトルは回転したベクトル$${f(a)}$$と$${f(b)}$$の和と等しくなることが観察できます。式で表現するなら$${f(a+b)= f(a)+f(b)}$$です。
このことは他のの回転や射影についても成り立ちます。
と、いうことで$${f(a+b)= f(a)+f(b)}$$もこれらの変換たちの共通点です。

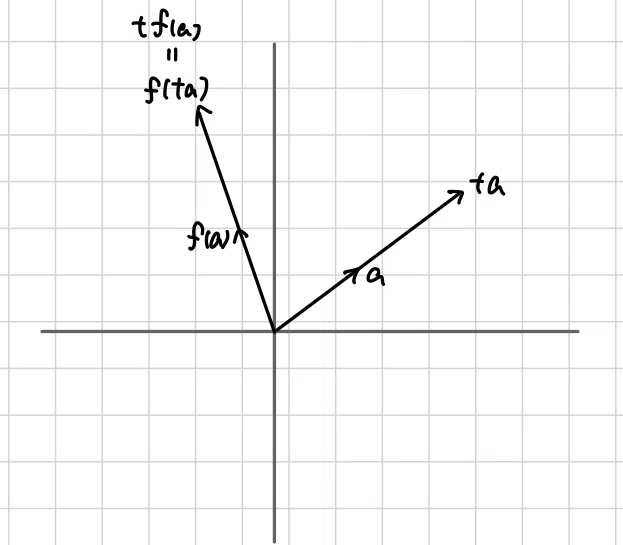
さらにもう一つ共通点を挙げてみましょう。ベクトル$${a}$$に対して実数$${t}$$をかけたベクトル$${ta}$$を考えます。$${ta}$$は図形的にはベクトル$${a}$$をその向きに沿ってに大きさを$${t}$$倍伸ばしたもの($${0 <t < 1}$$なら縮めたもの、$${t}$$がマイナスなら逆向き )です。回転変換$${f}$$で得られるベクトルも含めて、$${a,ta, f(a), f(ta)}$$の4つのベクトルを図示すると下図のようになります。
和$${ta}$$を回転したベクトルは回転したベクトル$${f(a)}$$に$${t}$$をかけたものと等しくなることが観察できます。式で表現するなら$${f(ta)= tf(a)}$$です。これも他の回転や射影についても成り立ちます。よって、新たな共通点として$${f(ta)= tf(a)}$$を見つけました。
線形写像
ベクトルを別のベクトルに移す変換$${f}$$で次の2条件が成り立つとき$${f}$$は線形写像であるといいます。(正確には線形写像とはより一般に2つのベクトル空間の間の写像に対して定義される概念です。詳しいことは線形代数の教科書を参照してください。)
2つのベクトル$${a,b}$$をどのように選んでも、$${f(a+b) = f(a)+f(b)}$$が成り立つ。
ベクトル$${a}$$と実数$${t}$$をどのように選んでも、$${f(ta)=tf(a)}$$が成り立つ。
前節で見たことから回転や射影は線形写像の具体例です。これらが線形写像であることをうまく利用することで後回しにしていた「一般の回転、射影について移り方を具体的に記述する」という問いを見通しよく解くことができます。
演習問題
3次元ベクトルの回転、2次元のベクトルの射影、3次元ベクトルの直線への射影、3次元ベクトルの平面への射影がすベて線形写像であることを図をかくことで確認してみましょう。