
一瞬の動き出し。反射を基に。

マガジン設立から早3か月がたちました。
かなり良質な記事が揃っています。
最近オンライントレーニングやとトレーニングを行う中での疑問や解決案を模索したく今回の記事を書いていこうかと思います
ぜひ1度ご覧になってください。
――――――――――――――――――――――――――――――――――
今回はスプリントで使われる様々な反射についてを書いていく中で1~数歩の動き出しを最も速く移動するにはどうすれば良いかを考えたいと思います。
特にスポーツシーンで良く使われる伸張反射とは身体の筋肉や腱が伸ばされるとその後バネのように縮まろうとする現象のことを示します。
この現象はスポーツシーンで多く見られパフォーマンスアップには必要となっている部分です。
そしてどのスポーツでも足が速くなりたいと願うアスリートは多くいらっしゃるのではないかと思います。
走る動作での反射を理解すること。そして足が速くなる策を考えていきたいと思います。
▼走りに使われる伸張反射
まず走りに使われる伸張反射を簡単にまとめていきたいと思います。
・肘伸展からの伸張反射
クリスティアーノロナウドやエムバぺの動きに多く見られます。
走る際に肘を伸ばすことで前胸部が伸ばされます。その後、前胸部が縮む力で腕が前に出る反射です。

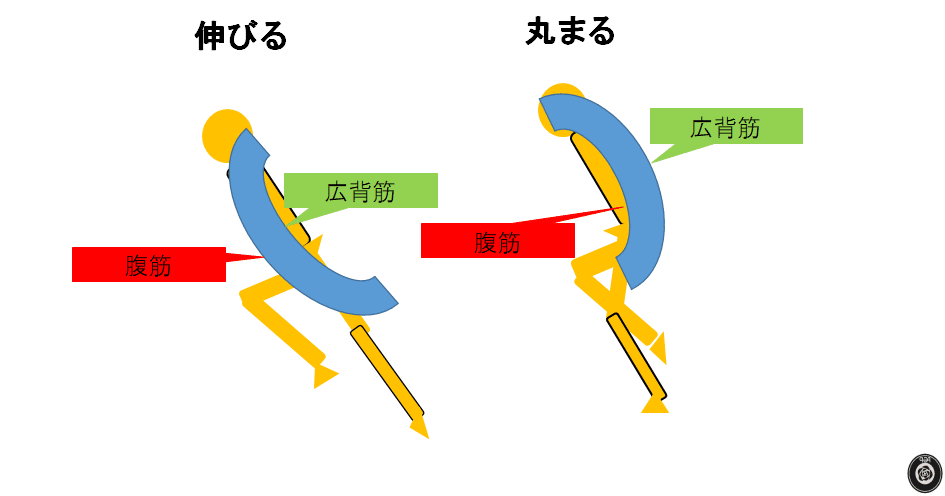
・腹筋・広背筋サイクル(背中の伸張反射)
エムバぺなどによく見られます。走り全体のリズム形成を担っています。足を着くときに丸まる。そこから一気に伸びあがる走りのリズムは広背筋・腹筋の相互の伸張反射によって起こります。
・ハムストリングスの伸張反射:遊脚期後期でハムストリングスが伸ばされる。足がつきハムストリングスが縮むことで前への推進力が生まれる。
アキレス腱反射、足底腱膜反射、ウィンドラス機構を用いた前足部反射
:この部分に関しては詳しく解説している記事ありますのでご参照ください
ここまでは今まで記事で述べてきた部分でもあります。
ここからは姿勢反射について書いていきます。
▼走りに使われる姿勢反射
反射には伸張反射に加えて姿勢反射というものがあります。
姿勢が崩れた際にバランスをとるように使われるものです。
随意運動には、無意識のうちに遂行される自動的な運動が随伴します。
例えば歩行の開始、動作の開始、障害物の回避などの動作は注意や正確な制御を必要とする随意的な動きであるが、歩行時のリズミカルな手足の動きや姿勢の調節など、自動的に遂行される定型的動作に私たちは注意を払うことはありません。
つまり動きに先行しての無意識的な準備が発生します。
全ての走り動作にはこれに最適な姿勢制御が先行しており、これにより我々は転倒から免れる。
この先行姿勢制御は目的とする行動の計画と運動プログラムで実現される予測的な過程であり、動物が未知の時空間に働きかける最初の能動的プロセスです。
ゆえに最適な姿勢制御の仕組みによって私たちの運動が適切に遂行されます。
この際使われるのが姿勢反射です。
運動の種類は大きく3つに分けられる。
1つは定型的・自動的運動パターンです。リズミカルな手足の動作や姿勢筋緊張の調整など意識に上らない自動的過程に関与する神経機構は脳幹と脊髄に存在します。

2つ目は情動行動です。逃避行動、防御姿勢、探索行動、接触行動覚である。快ー不快の情報に基づいて、辺縁系からの信号が視床下部を経由して脳幹に伝達することで誘発されます(辺縁系ー脳幹投射)

3つ目は大脳皮質に由来する随意的過程です。歩きや走りの開始、障害物の回避、注意を要する正確な動作などが含まれます。
随意的な運動機能の発動には大脳皮質における認知機能と大脳皮質から脳幹および脊髄への下行路(皮質脊髄路)が重要な役割を果たします。

姿勢調節は無意識のうちに行われることがほとんどです。
姿勢制御には代償性姿勢制御と予期的姿勢制御があります。
代償性姿勢制御は外乱に対して身体バランスを補正する反応であり、脳幹・脊髄の姿勢反射系が担う。

予期的姿勢制御は運動の開始や運動中の動作変更に先行してこれに適切な姿勢を提供するための予測的過程であり、目的とする動作と連動する運動プログラムで実現される。
この姿勢制御は目的とする随意運動よりも0.1秒先行する。
つまり走りは巧緻運動とそれを支える姿勢制御の異なる神経機構によって実現されている。
先程述べた巧緻運動と姿勢制御。
体幹や上下肢の近位筋による歩行や姿勢制御と手指の遠位筋を用いる巧緻運動に異なる神経機構が関与する。
内側運動制御系

外側運動制御系

内側運動制御系を構成する神経機構は網様体脊髄路、前庭脊髄路、視蓋脊髄路などがある。起始核が脳幹に存在する脳幹ー脊髄下行路が主である。
下行路は伸張反射や屈曲反射、緊張性頸反射、迷路反射、前庭動眼反射や立ち直り反射に関わる。
緊張性頸反射:首を曲げると手が曲がり、足が伸びる。首を上に上げると手が伸びて、足が曲がる反射です。
スタートシーンでは首をグッと曲げることで蹴り出しの補助をしている場面が良く見受けられます。
動画だと少しわかりにくいですが地面を押すタイミングで顎を引いてるのがわかるかと思います。
前庭系:前庭系が働くと伸筋を興奮させ、屈筋を抑制することで姿勢の調整を行う器官です。皮質からの投射ではない為、素早い姿勢反応に関与すると言われています。
前庭系には4つの役割があります。
1、前庭器官(耳の内側にある体の平衡感覚をつかさどる器官)からの情報によって、空間で頭部を正中に保つ
2、頭部の偏移に対する眼球のコントロール眼球の動きに対して頭部のコントロールを行う。
3、固有受容器、特に脊柱起立筋からの豊富な感覚情報は姿勢保持や重心に応じてアライメントを作る
4、足部からの情報は立位、歩行バランスに必要であり、前庭系に刺激し空間における身体の認知を促す。

前庭の感覚受容器は5つある。
3つの半規管、卵形嚢と球形嚢である。
半規管は角速度系として機能する。卵形嚢と球形嚢は重力や直線的な加速度による身体の動きと直線状の頭部の動きに関する情報を提供します。

前庭系の反射は以下のものになります。
前庭頸反射:頭頚部や上半身が大きく傾いた際に三半規管が頭部の傾きを感知し、頭部が地面と垂直になるように維持される反射。

前庭脊髄反射:頭の位置や加速度の変化に対して頚部や体幹の筋緊張を制御して安定した姿勢を維持すること。
前庭動眼反射:頭が動いたときに反対側に眼球を動かして網膜に移る外界のブレを防ぐ。頭が動いているときも物が見えにくくならないように調節する反応。

立ち直り反射:姿勢が崩れた際に頭や身体を基の位置に戻して直立を保とうとする反射。

ステッピング反射:支持基底面から重心が外れると体が進行方向に倒れていきます。転ばないようにするために足を1歩出して新たな支持基底面を作り安定させる反射です。

先程述べた運動の種類には3つあり、その中に自動的過程の運動が含まれます。
この自動的過程の運動、つまり走りのようなオートマティックな運動を可能にするのはどのようなものか?
脳幹には歩行、走りや姿勢調節に関与する神経機構が存在します。
動物実験にて中脳歩行誘発野、視床下部歩行誘発野、小脳歩行誘発野が同定されている。
中脳歩行誘発野の信号は、脳幹・脊髄の歩行リズム生成系と筋緊張促通系を活動させて動きます。
歩行リズム生成系は網様体脊髄路と脊髄のリズム生成器(CPG)で構成されます。
筋緊張促通系には内側運動制御系の網様体脊髄路や前庭脊髄路が含まれます。
網様体脊髄路は速い伝導速度と遅い伝導速度の下行繊維で構成されます。
前者は姿勢(身体アライメント)の変更や歩行リズム生成系としてCPGを活性化し、肢運動に寄与します。
後者は筋緊張抑制系として筋緊張の制御に働きます。
つまり初速には網様体脊髄路の速い伝導路が用いられていることがわかります。
走りは”巧緻運動”とそれを最適に遂行するための”姿勢制御”の2つから成り立つと書きました。
つまり走りの運動プログラムは”巧緻性”と”姿勢制御”から構成される。
運動プログラムは補足運動野と運動前野(6野)で生成される。

大脳皮質の一次運動野(4野)と運動前野(6野)、補足運動野(6野)は頭部、体幹や上下肢の運動に関与する。
4野からは脊髄への投射が、6野からは脳幹の投射が優位になります。
6野で生成される姿勢制御の運動プログラムはは皮質ー網様体投射を介して脳幹に、そして巧緻運動のプログラムは4野に伝達される。
更に6野に起始する皮質ー網様体投射は網様体脊髄路(内側運動制御系)を動員して、目的とする巧緻運動を遂行するための予測的姿勢調節を実現する。
網様体脊髄路によるセットが完了した後に、4野からの運動指令が外側運動制御を下行して巧緻運動が実現する。

この一連の運動プログラムを生成する前には自己の身体を認識できているかが非常に重要になってきます。
自己の身体を認知する仕組みは行動を発現するための基盤であります。
我々が特定の環境下で運動を発現するには、その空間内における自身の身体位置や体幹、手足の姿勢をリアルタイムに認知していなければいけません。
脳の中では身体が体表モデルと連携した内的姿勢モデルとして構成されます。
これを身体図式と呼びます。

身体図式はすべての感覚情報が統合される側頭ー頭頂皮質で生成され、このリアルタイムの身体情報は、前頭葉の6野に伝達され、この領域における運動プログラムを生成するための初期条件(身体の傾き、身体部位のアライメントや空間内位置情報)を提供している。
身体図式は身体の持ち主が自分自身であること(身体所有感)、運動の主体が自分であること(運動主体感)を認知するためにも必須です。
そのため側頭ー頭頂葉からの6野への投射は自己身体の認知情報に基づいて運動を発現するためには必須のシステムであります。

つまり内側運動制御系、外側運動制御系を発動させて運動プログラムの生成、実行の前には自己身体の認知が重要であるということが言えます。
今まで書いてきたこれらの伸張反射、姿勢反射によって走りが形作られる。
▼動き出しを速くするには?
では最近記事で記している動き出しの数歩を速くするにはどんな対応をしていくべきなのかを考えていきたいと思います。
以前記事で起こした伸張反射の発動条件は脱力、そして意図的ではなく無意識下の状態で起こすのが基本と記事に書かせてもらいました。
今までは走りに関する実際の動きがどうなっているのかを身体分析から考えてきましたが今回は神経機構も考慮に入れて考えていきたいと思います。
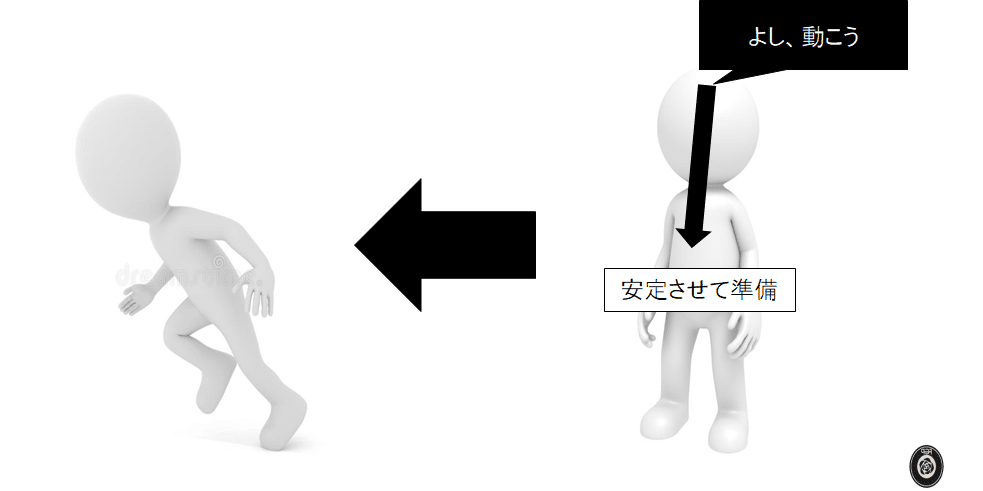
動き出しの前提は重心を素早く外してステッピングを促すことです。支持基底面から重心が外れたときや身体が不安定になった状態でステッピングは発動します。
ということは意図的に身体を不安定な環境下に置かせて結果的に反射を引き起こさなくてはなりません。
いかに不安定にさせるかが勝負です。
それには先程から述べてきた神経機構が重要で、姿勢反射でブレーキをかけてしまうのを遅らせることが大事と考えます。特に先行して働く内側運動制御を賦活して身体の傾きを作るには「自分の身体がどのような位置でどのくらい傾けるのか」という身体の知覚を認知していることが重要であると言えます。
傾きの範囲を知ることができれば反射による抑制、制御ががかかる範囲に変化が起こります。

次に重心を外して反射を引き起こすスイッチとは、何か?
先程述べた巧緻運動や随意運動を起こす前には先行的な姿勢調整が起こります。
それは内側運動制御系、特に網様体脊髄路の速い伝導回路の賦活が重要と考えます。
どこから先行して動かし、内側運動制御系の賦活をしていくのか?
ここでもう一度プレー動画に立ち返りましょう。
素早く動き出すには身体を傾けて支持基底面から重心を外さないといけない。
— やすだともひこ (@yasudatomohiko1) October 23, 2020
その際に身体の傾きを自己認識していないといけない。
特定の環境下で運動を発現するためには空間内における自身の身体位置や体幹、手足の姿勢を認識しなければいけない。 pic.twitter.com/uKaEG9m1Ay
身体分析的に言えば内側運動制御系の体幹の中の骨盤もしくは胸郭から重心を素早く外した方が良いように感じます。
足からモーメントアームが短い骨盤から外して胸郭を後方に行かせない、制御させないようにすることが良いのかなと思います。
骨盤から外した際には胸郭がブレーキとならないようにすることが重要でピッチを速めてくれる作用があると考えます。
また、胸郭から重心を外した場合は足からのモーメントアームが長いため多少時間はかかりますがより大きな力発揮ができてストライドを広めてくれる、大きな1歩を出す作用があると考えます。

推奨トレーニング
→
ニーリングSWAY
SWAY
散々、忍者と言われた動き。Sway。横方向の動きをシームレスにすることは表現のパターンを増やす。 pic.twitter.com/Egjv13eNsz
— Sunny / サッカー×脳科学 (@sunny_strength) September 2, 2020
このどちら主動で行くかはヒトによってやりやすい感覚があるのか等今後検証が必要なようです。
ただ言えるのは重心を外して身体を傾ける際の身体認知は必須であるということは神経機構から考えて確かなようです。
▼最近のトピック 中村憲剛の足
最後に最近の自分のトピックを紹介したいと思います。
中村憲剛の足は偏平足。
フットボーラーにとって最適な足って?
若手とベテランの差が如実に表れている。 pic.twitter.com/o35zzUAsjd
— しゅんぺい (@Shunpei1222) October 18, 2020
このツイートを見ていただければわかる通り中村選手の足はいわゆる偏平足である。
最近、偏平足は良いのか悪いのかという問いを聞くことがしばしばあります。
私の回答は足のバネを使う際には不利に働きますが、衝撃吸収や支持基底面の広さ、バランスの観点からして有利と言えます。
前回、足から考えるスプリントという記事で足はその人の歴史を物語ると書いてきました。
つまりプレースタイル、その人の強みによって足は効率化したものになってきます。
以前中村選手は記事で自分がサッカーをする上で最も大切なことは「素早くボールを止めて蹴ることである」と述べていました。
足があまり速くない彼がトップレベルで生き残るにはこの点を極め、動き出しが速いFWに質の良いパスを供給してきた所以とも言えます。
そのため素早く止める、正確に止めるために特化する為に偏平足へと変化していったと考えます。
種々の障害は予想されますが、決して悪いものではないと私は思います。
大事なのはプレースタイルと足の兼ね合いかなと思います。
この記事はフットボーラーのプレーをもとに解説してきましたが、基本的に走りはどのスポーツシーンでも使いますので、多くのアスリートやスポーツ愛好家の参考になれば幸いです。
理学療法士/スポーツシューフィッター 安田智彦
いいなと思ったら応援しよう!
