
Plate solvingによる導入支援,Cedar e-finderが簡単!

Cedar e-finderはRaspberry Pi上で動作するplate solvingを用いた比較的新しい導入支援ツールです。作者のsmroid氏自らが2024年7月にCloudy Nightsで紹介しました。日本語で読めるネット上の情報ではT-Studioさんが24年9月に紹介された記事が知る限りでは初めてのようで,他には情報は見つかりませんでした。
Plate solvingを用いた市販の導入支援ツールにはAstroidがあり魅力に感じていましたが,少々値が張ります。一方Cedarはアプリーションは無料。ハードウェアもRaspberry Pi(4B)が手元にあったので早速試してみました。結果としてサイトの説明通りに作業すればなんのトラブルもなく動作したので改めて説明するまでもないのですが,簡単にセットアップから実際の使用までに至ったので,以下にそのプロセスについて紹介します。
システムをmicro SDカードに焼く
私はMacを使いました。WindowsやLinusでも同様にできるはずです。上記のGitHubのサイトから,“Using the pre-built SD card image”の“Download and burn”のセクションにあるイメージファイル“cedar_rpi_2025_feb_20.img.gz”をダウンロードします。圧縮されたファイルなのでダブルクリックして解凍しておきます。ファイル名はバージョン名のようですから,必ずしもこのファイル名ではないでしょう。
手順の2番目にあるリンクから"Raspberry Pi Imager"をダウンロードして立ち上げます。これを使ってmicro SDカード(32GB以上)にイメージファイルをインストール?します。このあたりはRaspberry Piを使ったことのある方は経験済みでしょう。以下のように設定します。

"デバイスを選択"は無視。"OSを選択"ボタンを押して表示されたリストの最後にある"Use Custom"を選択するとファイル選択画面が出るので,先ほど解凍しておいたCedarのイメージファイルを選択します。"ストレージ"でファイルを焼くSDカードを選択して"次へ"ボタンを押すと,"Use OS customization?"と聞かれるのて"いいえ"を押します。SDカードによってはうまくファイルが焼けない場合もあるようなので,そのときにはカードを替えるとよいようです。
Raspberry Piを立ち上げる
Raspberry Pi 5, 4B, 3Bが使え,4B以上が推奨です。私は4Bを使いましたが少し動作が遅いので,5の方が快適でしょう。RAMは最低4GBが推奨です。SDカードをRaspberry Piに刺してUSB C経由で5V電源を入れます。このあたりはRaspberry Piのセットアップの仕方が多くのサイトで紹介されているので参照してください。4Bはスペック的には3A以上が推奨ですが,Raspberry Pi HQカメラを使う限り,2.4Aのモバイル電源でも安定して動作しました。
1分ほど待ってスマホのwifi設定画面を見ると"cedar"がリストアップされるので,選択します。パスワードはceder123cedar123です。ブラウザを立ち上げてIPアドレス192.168.4.1につなぐと,カメラが接続されていないという表示が出ますが,Cedarには接続できていることが確認できます。ここから先は2025年2月20日のバージョンなので,アップデートによって必ずしも同じ画面にはならないかと思われます。
以下のような画面が表示された場合はしばらく待ってから接続するか,電源の電流容量を確認してみてください。USB経由でASIカメラ(ASI385MC,ASI120MMが推奨)を使って試した時には,2.4Aの電源ではこの表示が出て動作が安定しにくかったです(2025/3/2追記: GitHubのページをよく読むと,USB3のポート(青色)に刺すとwifi関連のトラブルが起こることがあると書かれています。確かに青い方に刺していたので,電流の容量が原因ではなかったのかもしれません)。

ASIカメラがあればUSBポート(青色「ではない」方)にカメラをつないで以下のように日中に接続テストができます。その場合は赤丸で示した"Day"にチェックを入れます。

カメラを取り付ける
16〜25mm, F2以下のレンズが推奨されているので,25mm,F1.4のCマウントレンズを購入しました。およそ10°の視野になるとのことです。カメラはこれも推奨のRaspberry Pi HQカメラにしました。
カメラの様子がおかしい
さっそく試してみたところ,いくらフォーカスを調整してもピントが合いません。HQカメラはCS/C両方のマウントに対応していて,Cマウントを使う場合にはカメラとセンサの距離を伸ばすためのアダプタが必要です。これをつけているのに合いません。
カメラを見てみるとセンサの前に青いガラスが入っていて,これはIRカットフィルタだそうです。ASI385MCにそれがないのは仕様だそうだからいいとして,このフィルタ,何か曇っているというか,すりガラスのようになっていて,これが原因のようです。


こちらを参考にセンサ部分を分解してフィルタを外し,アルコールでゴシゴシすると無事に透明になりました。確認してみるとちゃんとピントも合いました。

カメラの筐体は以下のサイトでライセンスフリーの3Dプリント用のstlファイルをダウンロードして印刷しました。

組み立て方は以下に写真付きでの詳しい説明がありました。

改めて,接続
システムを立ち上げてCedarに接続すると,以下のような画面になります。右上のメニューをタップすると,設定画面が出てきます。

モードはFocus, Align, Aimの3つです。Preferenceでテキストの大きさなどを設定できます。

Locationには実際には観測地の緯度・経度が表示されています。Locationをタップすると地図が表示されて場所を設定できます。あまり細かく設定できませんが,プレートソルブのためにはあまり細かな設定は不要なのかもしれません。

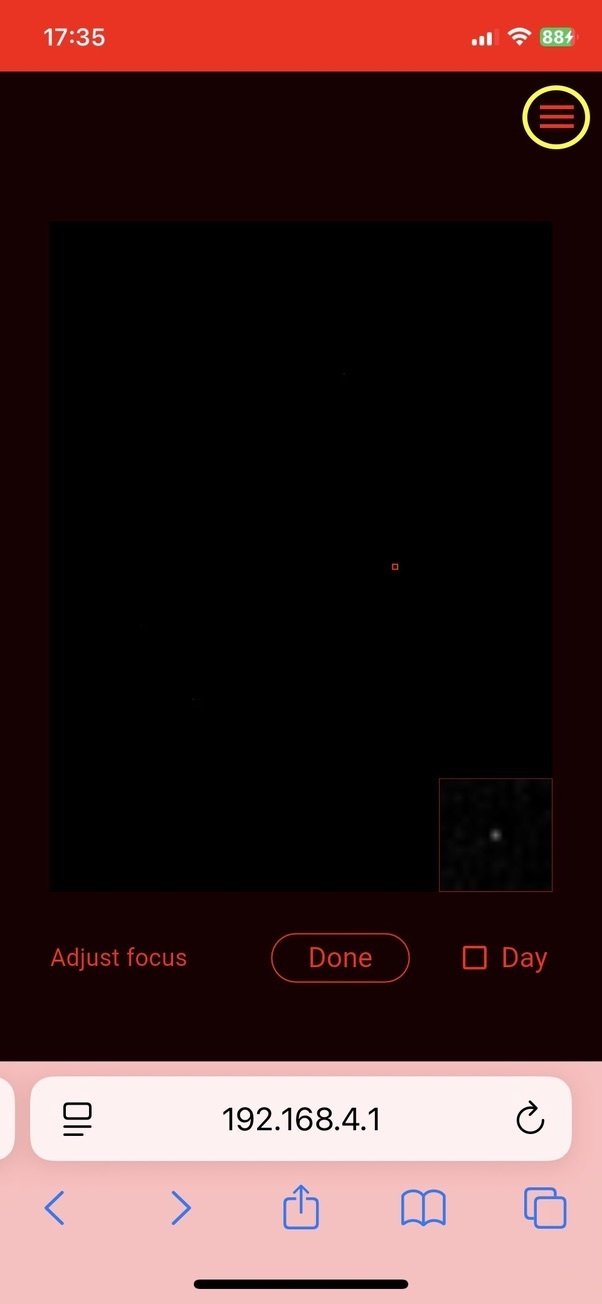
Focusモードでフォーカスを合わせます。あらかじめ昼間に遠くの景色でおおよそ合わせて目印をつけておきました。この場合は”Day”をチェックしておきます。夜間に星でピント合わせするときにはこのチェックを外します。写野内の一番明るい星が右上に拡大表示されてピントを合わせやすくしてくれます。

ピントが合えばAlignmentモードに切り替えてアライメントします。鏡筒との光軸をできるだけ合わせてカメラを取り付け,望遠鏡の視野に明るい星をいれます。Cedarの画面では写野内にある明るい星がいくつか四角でハイライトされます。カメラと鏡筒の光軸がおおよそあっていればCedarの画面の真ん中付近に望遠鏡で捉えている星が四角でハイライトされて見えるはずです。丸い印は望遠鏡の視野を表しています。この段階ではまだアライメントが済んでいないので,望遠鏡の視野内の星と丸い印は重なっていないことが普通だと思います。そこで視野内にある星をタップすると円がその星と重なりアライメント終了,のはずなのですが,円が移動しません。反応が遅いのかと何度か試しますが,それでも円は動きません。色々試して,”Day”にチェックを入れて日中モードにしてからタップすると円がそこに移動して円内に四角でハイライトされた星が入りました。確かこのあとにcalibrationと表示されてアライメント完了だったかと思いますが,覚えていません。ちなみにDayモードを使えば昼間に鏡筒とカメラのアライメントも可能です。


するとAimモードに切り替わり視野内の星の座標が表示されます。黄色で囲んだ文字部分をタップすると画面が切り替わり,赤経・赤緯と方角・高度が表示されます。

ここでRight ascension...の文字のエリアをタップすると赤経・赤緯表示に,Azimuth...の文字のエリアをタップすると方位・高度表示になります。push-toの経緯台で使用するので,azimuth-altitude表示にしておきました。


SkySafariの設定
CedarはSkySafariと連携できます。SkySafariのMenu→Settings→Presets→Add PresetからASCOM Alpacaを選びます。

Auto-Detectを選択してScan Network For Devicesを押してから右上のNext...に進みます。

Preset Nameは自動的に入力されるのでそのまま,Readout Rateは適当ですが10 per secondにしました。Save Presetを忘れずに押します。

あとはいつものようにSkySafariのアライメントです。Scopeボタン→Connectし,星図上で望遠鏡の視野内の星を選択,Alignを押して終了。下の図では少しずれていますが,本当は画面の真ん中にあるものは視野の真ん中にあって,気づくようなずれはありませんでした。

プレートソルブがもう少し早いと申し分ありませんが,十分実用的だし,エンコーダの取付が難しい経緯台でも使えて,3Dプリンタを持っていれば2万円程度で実現できるのもありがたい。smroidさん,ありがとう!
カメラはビクセン規格のファインダ台座に取り付けられるアリガタを3Dプリンタで作成して取り付けました。ファイルは以下です。ご自由にお使いください。
