
視野計算 概要と細部

セル単位視野の計算方法を解説します。可視化の話はしません。
実装・解説に C# を使いましたが、図だけを見ても十分だと思います。
実装は ここ です。
列座標系の設定
円形の視野を計算するためには、まず円を八等分します。

それぞれの 8 分円に対して視野計算をすれば、 360 度分の視野が得られます。
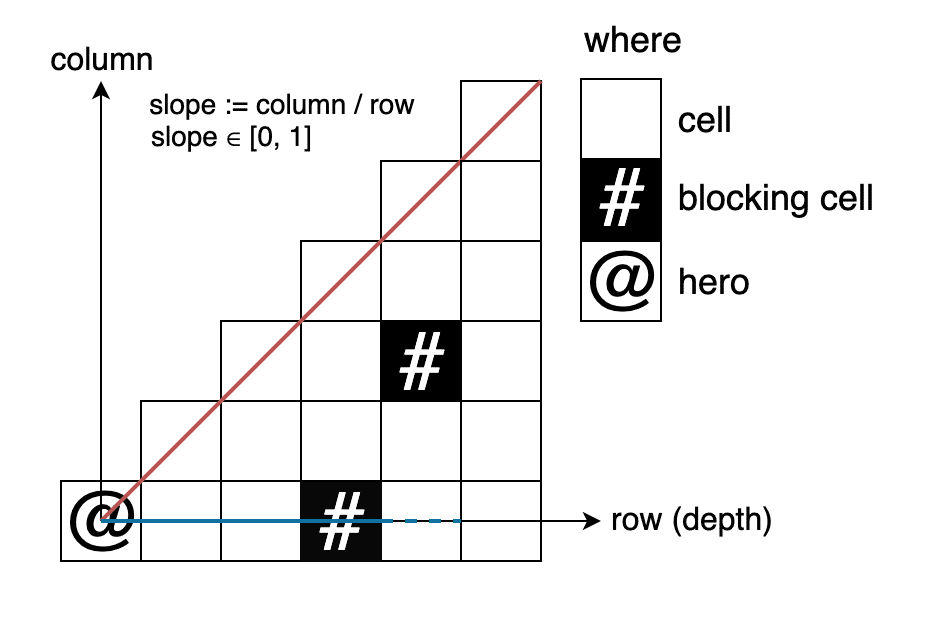
8 分円の走査には、 (row, col) 座標系を使います。たとえば、上図の 8 分円 B は、以下のように row, column の基底を取っています。

同様にして、 (row, col) → (x, y) の変換を 8 通り用意すれば、全ての 8 分円に対する走査ができます。
(row, col) は (x', y') と読み替えてもいいです。
列座標系と型定義
まず 8 分円 (Octant) を列挙します。
/// <summary> Clockwise from zero o'clock </summary>
public enum Octant {
A, B, C, D, E, F, G, H,
}
基底ベクトルの定義に先立ち、ベクトル型を作ります。
public struct Vec2i {
public int x;
public int y;
public int len => (int) Math.Sqrt(x * x + y * y);
public Vec2i(int x, int y) {
this.x = x;
this.y = y;
}
public static Vec2i fromTuple((int, int) t) => new Vec2i(t.Item1, t.Item2);
public override string ToString() => $"({x}, {y})";
public static Vec2i operator *(Vec2i v, int c) => new Vec2i(v.x * c, v.y * c);
public static Vec2i operator +(Vec2i v1, Vec2i v2) => new Vec2i(v1.x + v2.x, v1.y + v2.y);
public static Vec2i operator -(Vec2i v1, Vec2i v2) => new Vec2i(v1.x - v2.x, v1.y - v2.y);
}
(row, col) → (x, y) の変換のため、 8 分円ごとに基底ベクトルを用意します。
public static class OctantExt {
public static(Vec2i, Vec2i) toUnitVecs(this Octant self) {
return unitVecs[(int) self];
}
/// <summary> [(row, col)] </summary>
static(Vec2i, Vec2i) [] unitVecs = new [] {
((0, -1), (1, 0)),
((1, 0), (0, -1)),
((1, 0), (0, 1)),
((0, 1), (1, 0)),
((0, 1), (-1, 0)),
((-1, 0), (0, 1)),
((-1, 0), (0, -1)),
((0, -1), (-1, 0)),
}
.Select(vs => (
Vec2i.fromTuple(vs.Item1),
Vec2i.fromTuple(vs.Item2)))
.ToArray();
}Scanner の定義
先に、視野計算に使う interface を定義します。
public interface iOpacityMap {
bool isOpaeue(int x, int y); // 不透明?
bool contains(int x, int y); // マップ内?
}
public interface iFovWrite {
void onRefresh(int radius, int originX, int originY); // 更新前に呼ぶ
void light(int x, int y); // 視野内である
}
円形視野の Scanner は、 8 分円 (Octant) ごとに OctantScanner を作って走らせます。
public static class Scanner<TFov, TMap>
where TFov : iFovWrite
where TMap : iOpacityMap {
/// <summary> Shared input among <c>OctantScanner</c>s </summary>
class ScanContext {
public TMap map; // マップ
public TFov fov; // 視野 (field of view)
public Vec2i origin; // 原点 (の offset)
public int radius; // 半径
public Vec2i l2w(Vec2i local) {
return local + this.origin;
}
}
public static void refresh(
TFov fov,
TMap map,
int originX,
int originY,
int radius) {
fov.onRefresh(radius, originX, originY);
// 原点を視野に含める
fov.light(originX, originY);
var cx = new ScanContext {
map = map,
fov = fov,
origin = new Vec2i(originX, originY),
radius = radius,
};
// それぞれの 8 分円 (Octant) に対して
for (int i = 0; i < 8; i++) {
// OctantScanner を作って走らせる
new OctantScanner((Octant) i).scanOctant(cx);
}
}
// 定義は後ほど
struct OctantScanner {
// ~
}
}
OctantScannerの定義の前に、もう少し考えることがあります。
傾きと視野内判定
slope := column / row として傾きを定義すると、
slope ∈ [0, 1] が8 分円の視野範囲です。
壁に遮られるなどすると、走査の視野範囲は狭くなります。
この図において、視野範囲を可視化すると、

視野をセル単位にすると、

ただし、走査範囲がセルの中心を含む場合、そのセルは視野内であるとしました。
走査の分割と走査状態
OctantScanner は、 8 分円を 1 列 (1 row もしくは 1 depth) ずつ走査します。

上図では、矢印が走査を表します。
図が悪いので(ごめんなさい)、ちょっと説明に付き合ってください。
@ の位置を (row, col) = (0, 0) とします。
row = 4 を走査するとき、 OctantScanner は 2 つに分かれました。
・赤色矢印は、 (row, col) = (4, 2) 以前のセルを走査します
・黄色矢印は、 (row, col) = (4, 2) 以降のセルを走査します
もしも、 (row, col) = (4, 3) も壁であったとすると、黄色矢印の範囲が変化します。
・赤色矢印は、 (row, col) = (4, 2) 以前のセルを走査します
・黄色矢印は、 (row, col) = (4, 3) 以降のセルを走査します
つまり、 一般化すると、
・直前のセルが透明 かつ 今見たセルが不透明
→ 赤色矢印の生成 (splitScan)
・直前のセルが不透明 かつ 今見たセルが透明
→ 黄色矢印の生成 (updateStartSlope)
というアクションと対応させることができます。
ここで再掲:

ところで、 row = 3 の走査に関しては、最初の壁を無視しています。
これは、直前のセルが無かった(この row 最初のセルだった) 場合とみなすことができます。
まとめると、状態は 3 つがあり、その次のセルに応じてアクションを取ります。
・直前のセルは無かった → 次(最初)のセルは無視
・直前のセルが透明だった → 次のセルが不透明ならspitScan
・直前のセルが不透明だった → 次のセルが透明なら updateStartSlope
なお、状態遷移図としては、

もしくは、状態遷移表にまとめると
previous \ next || opaque cell | transparent cell
----------------||--------------|-----------------
Initial || (none) | (none)
WasTransparent || splitScan | (none)
WasOpaque || (none) | updateStartSlope
OctantScanner
もう一踏ん張りです。 8 分円を走査する型を作ります。
僕は貼るだけです!
struct OctantScanner {
Vec2i rowUnit;
Vec2i colUnit;
float startSlope; // 開始傾き ∈ [0, 1] <= endSlope
float endSlope; // 終了傾き ∈ [0, 1]
public OctantScanner(Octant octant) : this(octant, 0f, 1f) { }
public OctantScanner(Octant octant, float startSlope, float endSlope) {
(this.rowUnit, this.colUnit) = octant.toUnitVecs();
this.startSlope = startSlope;
this.endSlope = endSlope;
}
public OctantScanner(Vec2i rowUnit, Vec2i colUnit, float startSlope, float endSlope) {
this.colUnit = colUnit;
this.rowUnit = rowUnit;
this.startSlope = startSlope;
this.endSlope = endSlope;
}
public void scanOctant(ScanContext cx, int startRow = 1) {
// それぞれの row に対して
for (int row = startRow; row <= cx.radius; row++) {
// scanRow を実行
if (this.scanRow(row, cx)) break;
}
}
enum RowScanState {
Initial,
WasOpaque,
WasTransparent,
}
// 赤色矢印の生成と対応
OctantScanner splitScan(float endSlope) {
return new OctantScanner(this.rowUnit, this.colUnit, this.startSlope, endSlope);
}
bool scanRow(int row, ScanContext cx) {
var rowVec = this.rowUnit * row;
// Rule クラスは後述 (傾きに関する計算を行います)
(int fromCol, int toCol) = Rule.colRangeForRow(row, cx.radius, this.startSlope, this.endSlope);
// finish the scan if the view is completely blocked
if (toCol - fromCol < 0) return true;
{ // finish the scan if the row is out of the map
var initPos = cx.l2w(rowVec);
if (!cx.map.contains(initPos.x, initPos.y)) return true;
}
// scan through the row
var state = RowScanState.Initial;
for (int col = fromCol; col <= toCol; col++) {
var pos = cx.l2w(rowVec + this.colUnit * col);
// skip points out of the map
if (!cx.map.contains(pos.x, pos.y)) return false;
// scan the cell and may take an action based on the state transition:
// state \ found | opaque cell | transparent cell
//
// Initial | (none) | (none)
// WasTransparent | splitScan | (none)
// WasOpaque | (none) | updateStartSlope
if (cx.map.isOpaeue(pos.x, pos.y)) {
if (state == RowScanState.WasTransparent) {
this.splitScan(Rule.updateEndSlope(col, row))
.scanOctant(cx, row + 1);
}
state = RowScanState.WasOpaque;
} else {
if (state == RowScanState.WasOpaque) {
this.startSlope = Rule.updateStartSlope(col, row);
}
state = RowScanState.WasTransparent;
}
cx.fov.light(pos.x, pos.y);
}
// finish the scan if we ended with an opaque cell
return state != RowScanState.WasTransparent;
}
}
また、 (slope, row, column) の対応を計算する Rule クラスは、
static class Rule {
public static(int, int) colRangeForRow(
int row, int radius, float startSlope, float endSlope) {
int from = (int) Math.Ceiling(startSlope * row);
int to = Math.Min(
(int) Math.Floor(endSlope * row),
Rule.maxColForRow(row, radius));
return (from, to);
}
static int maxColForRow(int row, int radius) {
return (int) Math.Sqrt((radius + 0.5) * (radius + 0.5) - row * row);
}
// [rectangle block model]
/// <summary> Called after scanning opaque cells </summary>
/// <remark> Minimum to 1f is required to consider positions such as (1, 1) </remark>
public static float updateStartSlope(int col, int row) => Math.Min(1f, (col + 0.5f) / (row - 0.5f));
/// <summary> Called when splitting a scan </summary>
public static float updateEndSlope(int col, int row) => (col - 0.5f) / (row + 0.5f);
// [diagnonal block model]
// /// <summary> Called after scanning opaque cells </summary>
// public static float updateStartSlope(int col, int row) => (col - 0.5f) / row;
// /// <summary> Called when splitting a scan </summary>
// public static float updateEndSlope(int col, int row) => (col - 0.5f) / row;
}壁が◇形であるとみなす場合は、 [diagonal block model] の方の式を使います。
Polish
実は、もうひと磨き必要です。現状の視野は、次のようになると思います。

これが issue です。

説明がいい加減になって来ました!
そこで、 OctantScanner.scanRow の直前に、壁に対する寛容な走査を入れます。
bool scanRow(int row, ScanContext cx) {
// ~~
// scan an opaque cell that was not scanned, but whose vertex may hide cells behind of it
var permissiveCol = Rule.colForSlopePermissive(this.endSlope, row, cx.radius);
if (permissiveCol > toCol && state != RowScanState.WasOpaque) {
var pos = cx.l2w(rowVec + this.colUnit * permissiveCol);
if (!cx.map.contains(pos.x, pos.y)) {
// here, we filtered points out of the map
} else if (cx.map.isOpaeue(pos.x, pos.y)) {
// light the opaque cell as an artifact
cx.fov.light(pos.x, pos.y);
// and update the range of the slopes
this.endSlope = Rule.updateEndSlope(permissiveCol, row);
// we do not update `state` here
} else {
// transparent cells are ignored
}
}
// finish the scan if we ended with an opaque cell
return state != RowScanState.WasTransparent;
} // OctantScanner.scanR
このとき、 Rule クラスに以下の関数を追加しました。
public static int colForSlopePermissive(float slope, int row, int radius) {
return Math.Min(
Rule.maxColForRow(row, radius),
(int) Math.Ceiling(slope * (row + 0.5) - 0.500001f));
// We reduced (0.5f + small_amount) not to include a vertex on an `endSlope` e.g. (row, col) = (1, 1),
}
これで走らせてみると……

ヤッター!
まとめ
視野計算は状態遷移に基づいて実装でき、得られる結果はダイレクトに視覚へ影響します。しかし、実際に組もうとすると、様々な細部が問題となります。したがって、一度くらいは自分で組んでみるのもアリだと思います。
note 初投稿でした。少しずつ、ローグライク周りの日本語記事を蓄積したいと思います。
付録
この記事の 実装 は、以下の記事に基づきました。
・FOV using recursive shadowcasting - RogueBasin
・FOV using recursive shadowcasting - improved - RogueBasin
このアルゴリズムには recursive shadow casting という名前が与えられていますが、むしろ recursive scanning ではないかと思います。
視野計算を実装した人が、次にやるとしたら
・視野の可視化
・視野アニメーション
・影の形を滑らかにする
・"未探索領域" を暗くする(Fog of War を実装する)
ただ、 note に書くのは一般的な話に留めようと思います。