ぼくのかんがえたさいきょうの3Dプリンターをつくる#2

2.ベッド駆動はz方向のみ
まず,大きく分けて3Dプリンターには4つの駆動形式がありetc...…
っていう話は多分他のところで死ぬほど説明されてるので割愛しまして
今回はその中から,当初搭載を予定していたものの不採用としたCoreXY駆動についての軽い紹介と不採用とした理由,本命の駆動方式についてお話します
CoreXY駆動っていうのはざっくり言うと,下の図に示すようにベルトを張ることで,2つのモーターが協働してヘッドを動かすことができるようにした構造のことらしいです
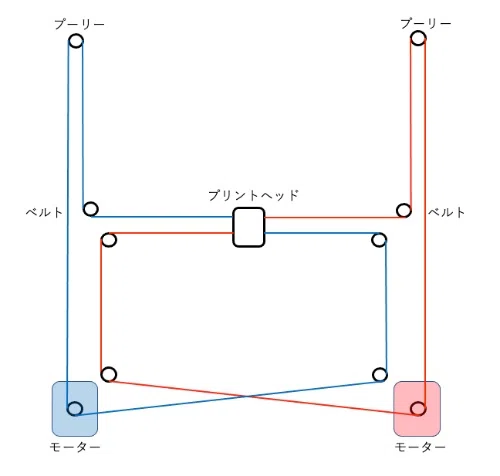
この方式の最大のメリットとして,最大の重量物たるヒートベッドはz方向のみの駆動でよいので,現在の3Dプリンターのような2.5軸移動による造形では高速移動する必要がなく,さらにXY軸を動かすモーターもフレームに固定されて動かないため,高速高加速度で移動する部分の重量を非常に小さくすることができる,という点が挙げられます.
ただこの方式,2本のベルト張力が揃っていないとXY移動の線形性が崩れるとかいうなかなか重いデメリットを抱えておりまして.
使用用途の割合が美術造形と機械部品とで0.1 : 99.9ぐらいの運用をしている私としては,できれば看過したくない部分になるんですよね ここは
それどころか,今回の設計ではダイレクト式エクストルーダを採用しようとしている関係上,ヘッド部分には少なくともステッピングモータとかいうクソデカ重量物が一つ乗ることになるんですね
その状態でスピード優先の駆動方式を採用してしまってはコンセプト崩壊もいいところなので,今回はCoreXY方式の採用を見送ることとしました
そこで代替として用いるのが,CrossXYなる方式です

これ確かUltimakerのなんかしらで見つけて以降市販品では全然見なかった方式なんですが,今回の要件にはマジでぴったりなんですよ
まずメリットとしては
動作部分がそこそこ軽量
X軸Y軸の重量がほぼ同じなので限界のパラメータを詰めやすい
モータ本体を動かす必要がない
ベルトがXYで独立してるので調整が容易
構造がシンプル
そんでデメリットについては,
デカくなるほど剛性的に不利
スライドレールの数が増える分ガタが出やすい
XYをそれぞれ1モータで駆動させるには設計が面倒
といったところだと思われます
実際そこまで大型でもないので剛性はよさげ,
スライドレールの数はXYともにCoreXY機のX軸と同じ数になったと思えばそこまで大幅な不利を受けることもなさそう,
モータ配置に関しては問題ですが,最悪それぞれ2モータ駆動にすればいいので制作上の障害にはあまりならなそう,
といったところで,実はあまり大きなデメリットがなさそうなんですよね
というわけで,今回の駆動方式はCrossXYにしよ~というのが結論です
次回は軽量なフレームの設計について考えましょうかね