ぼくのかんがえたさいきょうの3Dプリンターをつくる#3

お久しぶりです
#2からずいぶん時間が空きましたが,ようやくフレーム設計に入っていきますよ
さて,自作3Dプリンターでフレームというと
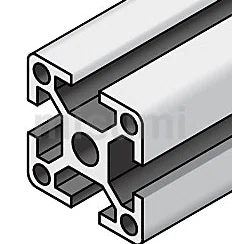
↑こんな感じのアルミフレームで組むことが多いと思うんですけど,私あんまりこれ好きじゃないんですよね
理由は枚挙にいとまがないんですけども,一部を挙げると
長手方向に一切拘束できないので位置決めが難しい
組付け時にねじ座面の摩擦で位置がズレる
Tナットの幅が小さすぎ
各面の中央(一番剛性に寄与する部分)が開いてるので変形しやすい
ねじの座面が一部浮くので振動で緩みやすい
剛性のわりに重い
といったところでして,まあできることなら使いたくないわけですよ
そこで白羽の矢が立ったのがこちら

アルミの角パイプです
これなら上でうだうだ言ってたデメリットのほとんどを解決できるわけです
正確に穴さえ開けてしまえばどう頑張っても穴隙間以上のズレは出ませんし,ねじの座面も360°全周当たりますし,曲げ方向の重量当たり断面二次モーメントに関しては圧倒的であると……
しかしまあこちらにも欠点はあるというものでして,特に致命的なのが
「角パイプ2本を直角に固定する方法が乏しい」という点
側面同士をねじで固定しても回転するだけですし,複数本で止めたとしても穴隙間の分だけ角度が変わってしまいます
これは常に復元方向に力をかけられる端面固定と比較して,明確なデメリットになります
ではどうするか?
両方使えばいいんですよね
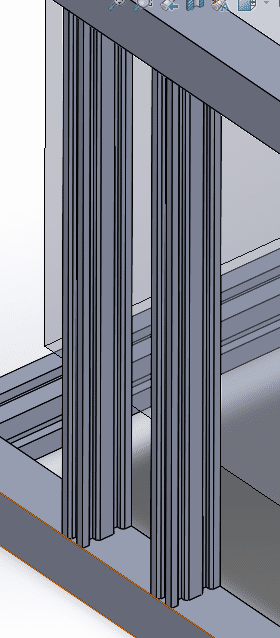
というわけで構想したフレーム構造がこれ

アルミフレームの強みである端面でのボルト止めをフルに活用するとこんな感じになりました
奥に見えてるちょっと細い二本は普通のアルミフレームではなくVスロットレールを採用します zのガイドですね
「最強謳ってVスロットwww」となるかもしれませんが,実はここ力抜いてもそんなに精度に悪影響与えるわけでもないはずなんですよ
というのも,精度に悪影響を与えるのは主に「曲がり」と「ガタ」なわけですが,
曲がり→リニアシャフトとか使うより圧倒的に剛性が高い
ガタ→ベッドを片持ちにすることによりモーメントの方向が常に一定かつ,ベッドはレイヤ変更の時しか動かないので慣性の影響も無視できるのでほぼ出ない
といった感じで案外問題ないのでは?という見立てです 知らんけど
あとはここにどうやって動力系を搭載していくかというところですね~
リニアシャフトとオイレスブッシュを使えば2モーターCrossXYは簡単に実装できるんですけど,滑り軸受のガタとかベルト2本使いの問題があり……
4モーターにすればリニアガイドでも簡単にメカを実装できる代わりに,既製品で4モーターの製品が少ないので制御基板の入手が面倒といったデメリットがあり……まあいろいろと決めあぐねております
あんまり高剛性高速機作ってもPCじゃ吐出速度足りませんしねー
でも今日は疲れたのでここまでにします
また今度 いい案が思いついたらお会いしましょうね