
防振脚HULAの実力測定と改善方法の公開

はじめに
2月初旬に「@thrutheframe」氏によりX(Twitter)上で発表された防振脚「HULA」がついにデータ公開された。公式で販売されているゴム製の「防振脚座」の問題を解決する優れた防振脚という触れ込みになっている。
One of my prototypes that has been testing for a long time. A horizontal plane damper for the Bambu Lab X1 and P1 series printers. It dampens the lateral movement caused by the X Y movement. As opposed to the accordion rubber dampers that makes the printer wobble. pic.twitter.com/BTmNXgMRO8
— thrutheframe (@thrutheframe) February 3, 2024
公式が販売している防振脚座は蛇腹状のゴム製で本体が引き起こす振動や横揺れを吸収して逃がす役割を持つが、時折「捻挫する」ことや揺れを逃がす結果「本体が振り回される」現象が発生してしまう。この問題解決を試みたのがHULAだ。
Ouch. The P1P sprained its ankle.🤕 @BambulabGlobal pic.twitter.com/eEQDu6OZ7X
— thrutheframe (@thrutheframe) April 6, 2024
今回公開されたデータを造形して様々なテストを行ったので以下にまとめる。なお公式の防振脚座とHULAが採用している免震機構はそれぞれ「積層ゴム支承」と「すべり支承」が元になっていると考えられる。詳しくは以下。
HULAの製造
HULAのデータはMaker Worldに公開されている。以下を参照。
造形にはいくつかの素材が必要となる。概ね以下のようなもの。
・PETGもしくはPLA+やPLA Toughのようなフィラメント
・TPU95Aフィラメント
・8mm-22mmのスラストベアリングx4個(11玉版が推奨されている)
・M3 12mmボルトx8本とM3ナットx8個
自分の場合は手元にあった以下の素材を使って造形/テストしている。同じものを使えば今回のテストと同じ結果を生み出せるだろう。参考までにどうぞ。
Maker Worldに公開されているデータにはプリントに必要な全てのパラメータとデータがあらかじめセットされている。「.3mf」ファイルをダウンロードして「Bambu Studio」にロードすればほぼ他の設定は要らない。(フィラメントの割り当てなどを変える程度)
注意点としては公開されているデータは1脚分のデータとなるため、プリンターの防振脚座として使うには登録されているデータを4回もしくは4倍量設定してプリントが必要になることぐらいだ。
防振性能の検証
防振性能の検証のため条件を整える必要がある。検証には「検証に用いるデータと条件」と「揺れを計測するためのツール」が必要になる。以下を参照。
下準備
まず最初に「検証に用いるデータと条件」について。3Dプリンターが大きく揺れる(揺さぶられる)状態はフィラメントを吐出する「ホットエンド」ならびに「ツールブロック」が激しく往復するタイミングとなる。
幸いHULAのプロジェクトデータには検証用に「Vibration Test」と指定された造形用のプレートデータが含まれている。こちらをベースに測定条件を以下のように整えた。

・ハイスピード対応のPLAを使用
・印刷パラメータを最高速300mm/sに指定
・フィラメントの最大堆積速度を24mm³/sに指定
揺れの計測は手持ちのスマートフォンを活用する。スマートフォンに使われている加速度センサーの生データを記録してデータとして吐き出せる無料のアプリがあるため、こちらを使って以降の記録を行った。
計測は「デスクに伝わる揺れの度合い」と「3Dプリンター本体の揺れ強度」を計測するため2台のスマートフォンもしくは2回の計測を行っている。
公式「防振脚座」の性能を知る
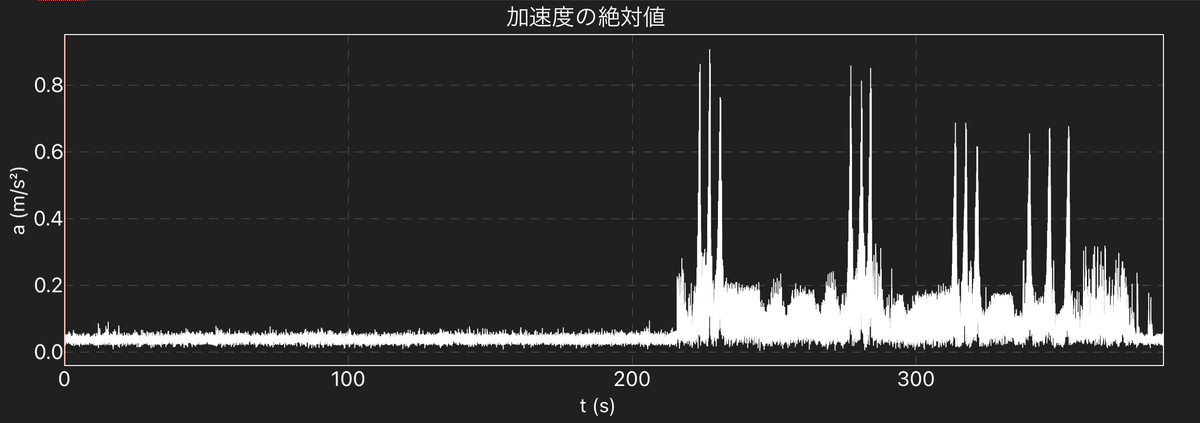
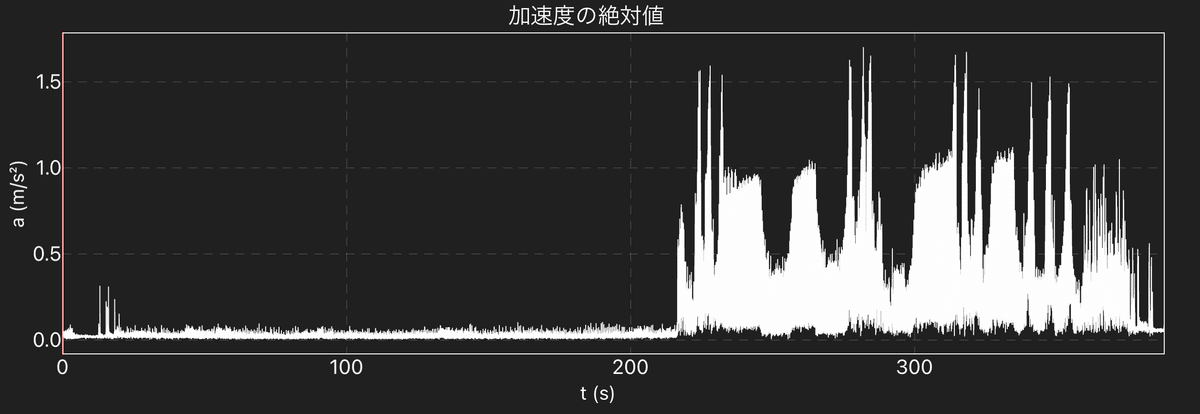
まず最初に公式で販売されている「防振脚座」の性能を見ていくことにする。テストを実施して計測された加速度センサーのグラフを以下に示す。最初の揺れが小さい間は定着のため減速している1層目で揺れが大きくなるのは2層目以降。


データを紐解くと公式「防振脚座」は優れた振動の分離機能を有していることがわかる。デスクに伝わる揺れは大きく軽減されており最大でも「0.265m/s²」に抑えられていた。一方で3Dプリンター本体は揺れに揺れており最大で「2.198m/s²」も揺れていた。ゴム製の防振脚座では揺れの分離はできても抑制はできない(下手をすると増幅させる)ようだ。
HULAの性能を知る
次にHULAの性能を見ていくことにする。テスト条件は先に掲載した公式「防振脚座」と同じになるよう揃えてある。グラフは以下の通り。


計測されたデータを見ていくとデスクに伝わる揺れは減衰はできているものの公式「防振脚座」には及ばないことが分かった。300mm/sで造形している際の揺れ平均は公式「防振脚座」の最大値と同じぐらいであり、最大値になると「0.669m/s²」もの値が計測された。約2.5倍の数字である。
一方で3Dプリンター本体の揺れは大きく軽減される。300mm/sあたりでの標準的な揺れは「0.3m/s²」あたりにまで減少。最大値は「1.514m/s²」であった。公式「防振脚座」が揺れに揺れて「1.3m/s²」程度揺れ続けていることを考えると4分の1程度の揺れに抑えられていることが分かる。揺れによる造形品質影響の低減効果はあるだろう。
HULAに対する懸念点について
揺れの計測テストを行った際に「HULA」のデータに不可思議な点があることに気づいた。公式の謳い文句通り3Dプリンターの揺れを減少させ、本体の制震も行えているものの高速印刷時に不可解な揺れのピークが現れている。

このような数値が出るケースを考えると「発生した揺れを吸収しきれていない」ことが考えられる。もしくは「何かしらの理由で揺れが直接伝わってしまい数字が跳ね上がっている」のではないか。そう考えHULAの構造を確認することにした。
TPU製のバンパーについて
HULAはTPU製のバンパーを採用している。TPU95Aは一般的に使われるPLAやABSなどと異なり「柔らかいフィラメント」と言われており適度な柔軟性を備えたフィラメントだ。バンパーに適したフィラメントと言えるが反発力を指で確かめると「硬すぎる」印象を受ける。ダンパーが硬すぎる場合は揺れのエネルギーを緩和できずに直接伝えてしまうことも考えられる。仮にフィラメントが「硬すぎる」場合に取れる対策としては以下の通り。
・フィラメントをより柔らかい「TPU85A」や「TPU64D」などに変える
・バンパーの設計を変更して厚みを薄くする
TPU95Aより柔らかいフィラメントは以下のようなものがある。
ただテストを行うために新しいフィラメントを用意することははばかられたため、より薄いダンパーを設計して試すこととした。
TPUダンパーのバリエーション制作
ダンパーのバリエーションを制作するためオリジナルのデータを分析して複製品を作成した。ダンパーの厚みは一律0.6mmであったため、バリエーションはこれよりも薄い0.5mm〜0.2mmをまずは制作することとした。
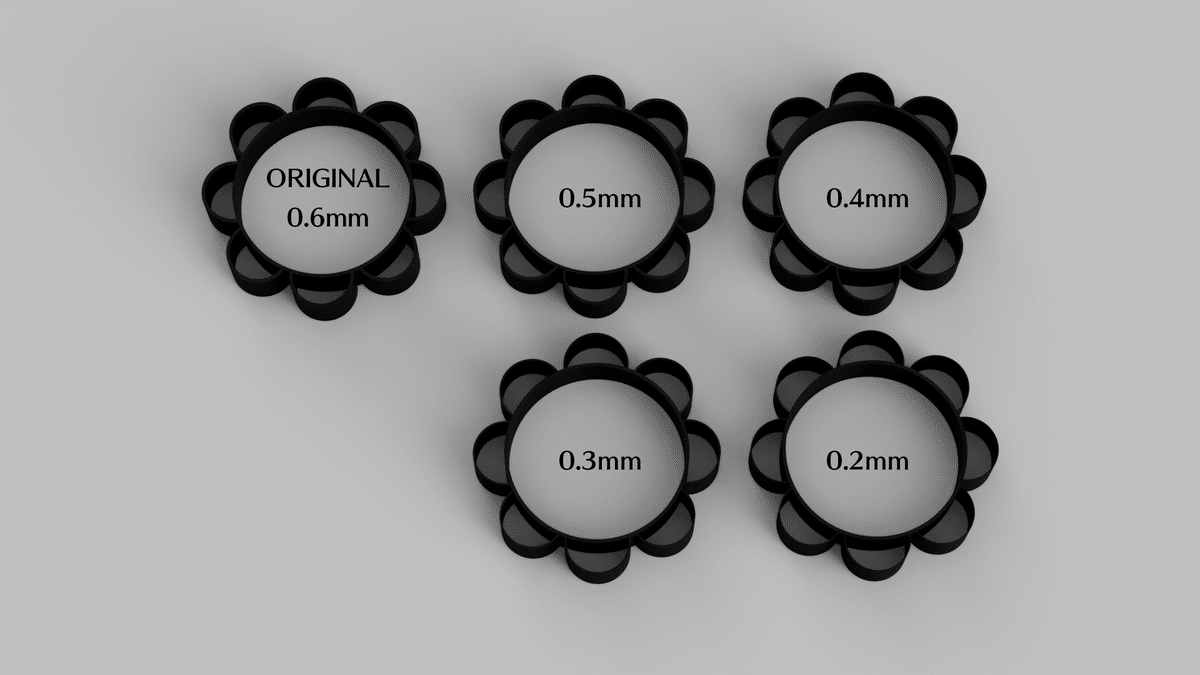
当然のことだがダンパー厚を薄くすることでデスクに伝わる揺れは減少できるものの、反面3Dプリンター本体の揺れは大きくなってしまう。トレードオフとなってしまうが揺れの伝達は騒音の元となるため公式の「防振脚座」とHULAの中間特性を持つダンパー厚を探すこととする。
改善版ダンパーのテスト
改善版ダンパーを製造するにあたりノズル経を0.4mmから0.2mmに変更した。まずは変更した結果を確認して欲しい。
0.5mm版

まず0.1mm薄くした0.5mmバージョンの結果から。結果を見ると順当な変化具合。ダンパーの壁面を薄くした結果、デスクに伝わる平均的な揺れは軽減できているものの、3Dプリンター本体の揺れはやや微増。結論としては0.6mmのオリジナルデータのほうが優れているだろう。
0.4mm版

次に0.2mm薄くした0.4mmバージョン。これはもう見るに耐えない結果になった。共振なのか分からないが全てのダンパーバージョンの中で最悪の結果となった。計測ミスを疑い複数回計測したが傾向は変わらず。0.4mmは選択肢に入れてはならないことが分かった。
0.3mm版


次に厚みが半分となる0.3mmバージョン。結果を見るとかなり改善している。デスクに伝わる揺れが軽減された。本体の揺れはややあるものの公式の「防振脚座」ほど揺れるわけではない。ピークとして現れる謎の突出した揺れについてもオリジナルより軽減できている。改善としての明確な結果が出たバージョン。
0.2mm版


最後に厚み3分の1となる0.2mmバージョン。結果だけ見ていくと最良の結果に見える。ピークレベルだけでなく平均レベルも大きく減少し、公式の「防振脚座」にほぼ等しいレベルの振動分離性能を見せた。プリンター本体の揺れも何故か最小となっており平均して「0.55m/s²」あたりに収束している。こちらも改善としての明確な結果が出たバージョン。
ただし0.2mmバージョンには弱点もあり「薄くて柔らかすぎる」ため脚座を中心位置に保持する力が極めて弱い。3Dプリンターの本体重量も相まって設置場所が0.5度ほど傾いているような場所で使うとダンパーが潰れてしまい防振性能がほとんど得られないことも分かった。これを最良版と結論づけるにはいささか危険なデメリットでもある。個々の設置場所を鑑みて0.3mmか0.2mmを選ぶのが良さそうだ。
さらなるダンパーの改善に向けて
先の実験を見ても謎の「一瞬の突出した揺れの計測」が回避できていないため、一応のテストとして2重ダンパー構造を採用してみることとした。揺れの勢いを殺しきれておらず底付きしている可能性を考慮したため。

狙いとしては薄い最初のダンパーで揺れを吸収しつつ、大きな揺れを2枚めのダンパー膜と合わせて受け取める戦略だ。結果としては以下の通り。


結論を述べると傾向は変わらない。数字だけ見ると0.3mmバージョンと0.5mmバージョンを混ぜ合わせたような結果となってしまった。
HULAが抱える構造的な問題について
ここまでの実証実験によってHULAを使用した時に計測される突発的な大きな揺れの異常値は必ずしもダンパーの構造によるものではないことが証明されている。考えられる問題は残すところ「HULAの構造的な要因」となる。

HULAの構造を紐解くと地震対策としてビルなどに採用されている「すべり支承&ダンパー構造」を採用していることが分かる。スラストベアリングは本来軸回転の摺動性を担保する部品だがハウジングを裏返して使うことでボールベアリングの可動域を360度に広げる使い方をしている。
この手法は水平方向に対する摺動性を向上させる反面、設計によってはベアリングの稼働が限界値を超えてしまいガタツキや揺れを逆に発生させる可能性がある。要因的に怪しいためベアリング周りを重点的に確認することにした。
ここから先は
¥ 500
この記事が気に入ったらサポートをしてみませんか?