書記が物理やるだけ#217 状態空間表現におけるシステムの安定性

現代制御ではシステムの安定性をどう判定するのか。
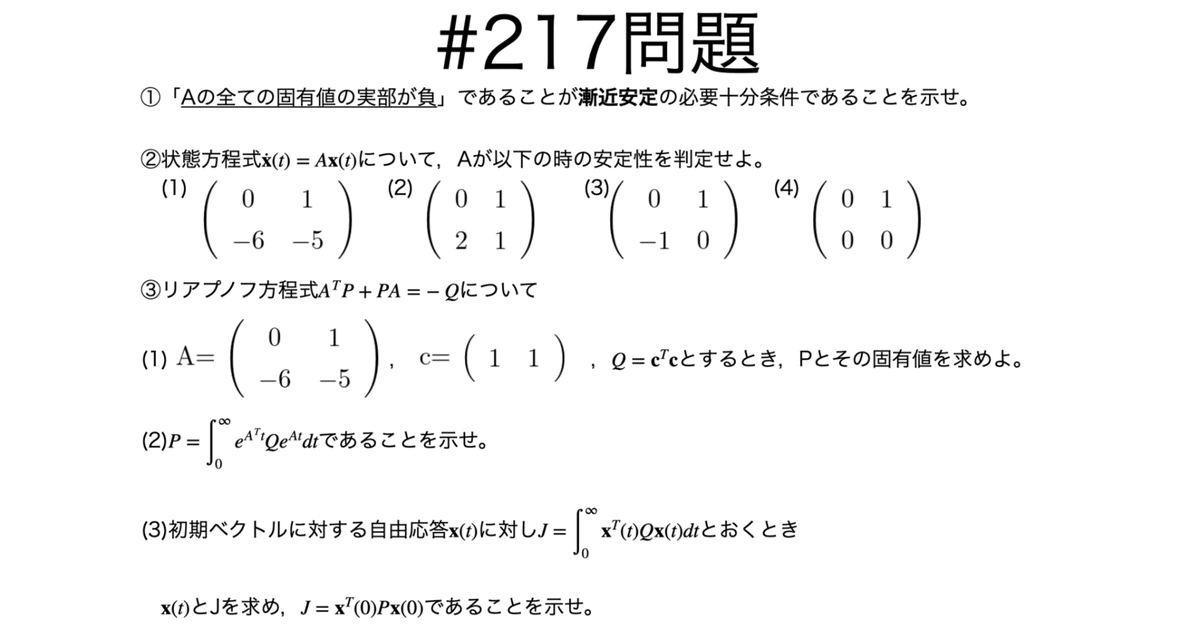
問題
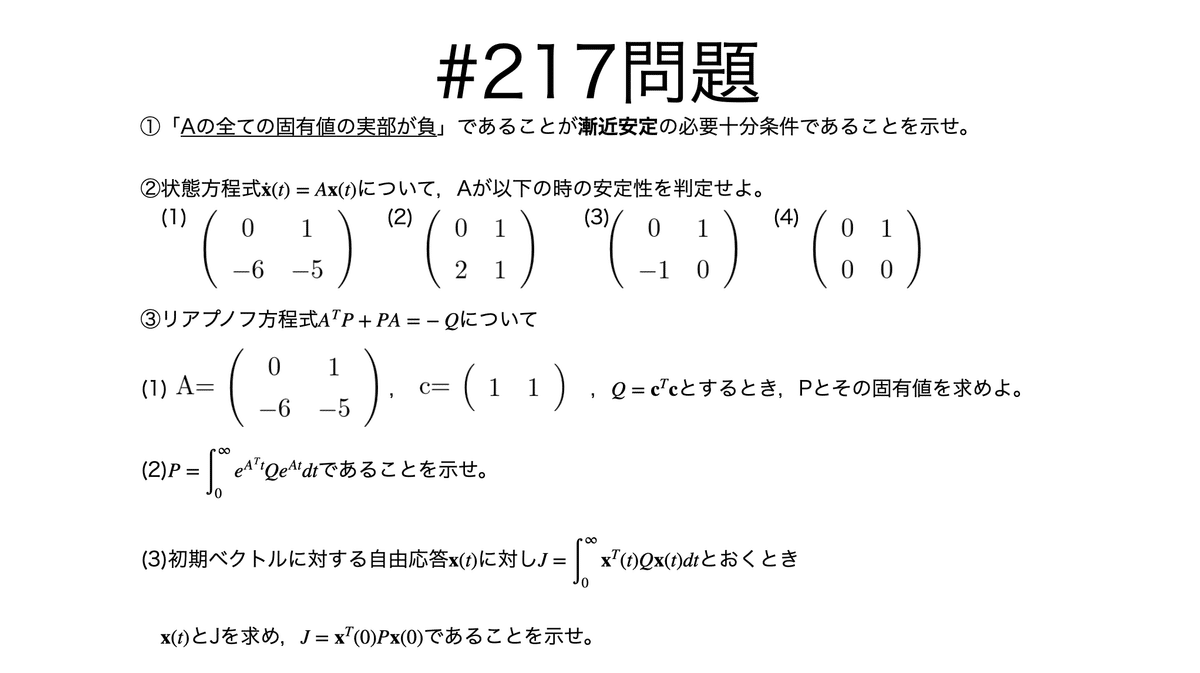
説明
x(t)を求めなくても,Aの固有値だけを調べれば安定性を判断できる。ただし固有値に実部0を含む場合はリアプノフ安定か不安定化で分かれるため個別に判定が必要。

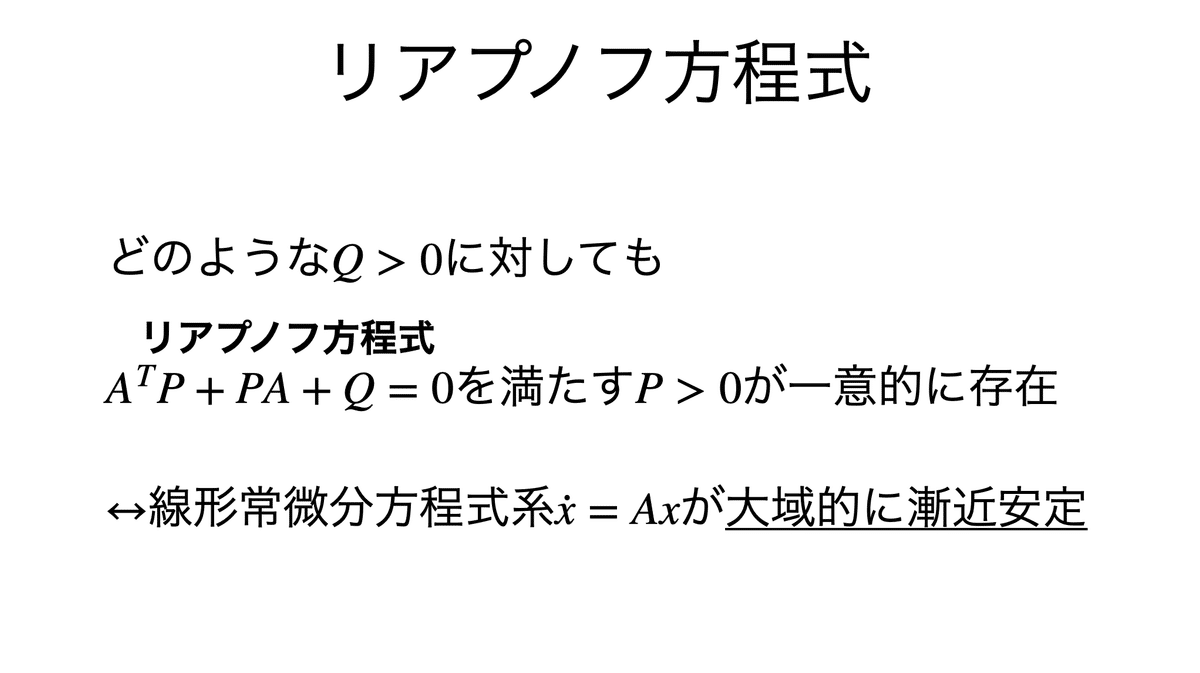
発展的な内容として,リアプノフ方程式の解の有無からも安定性を判断することができる。
解答
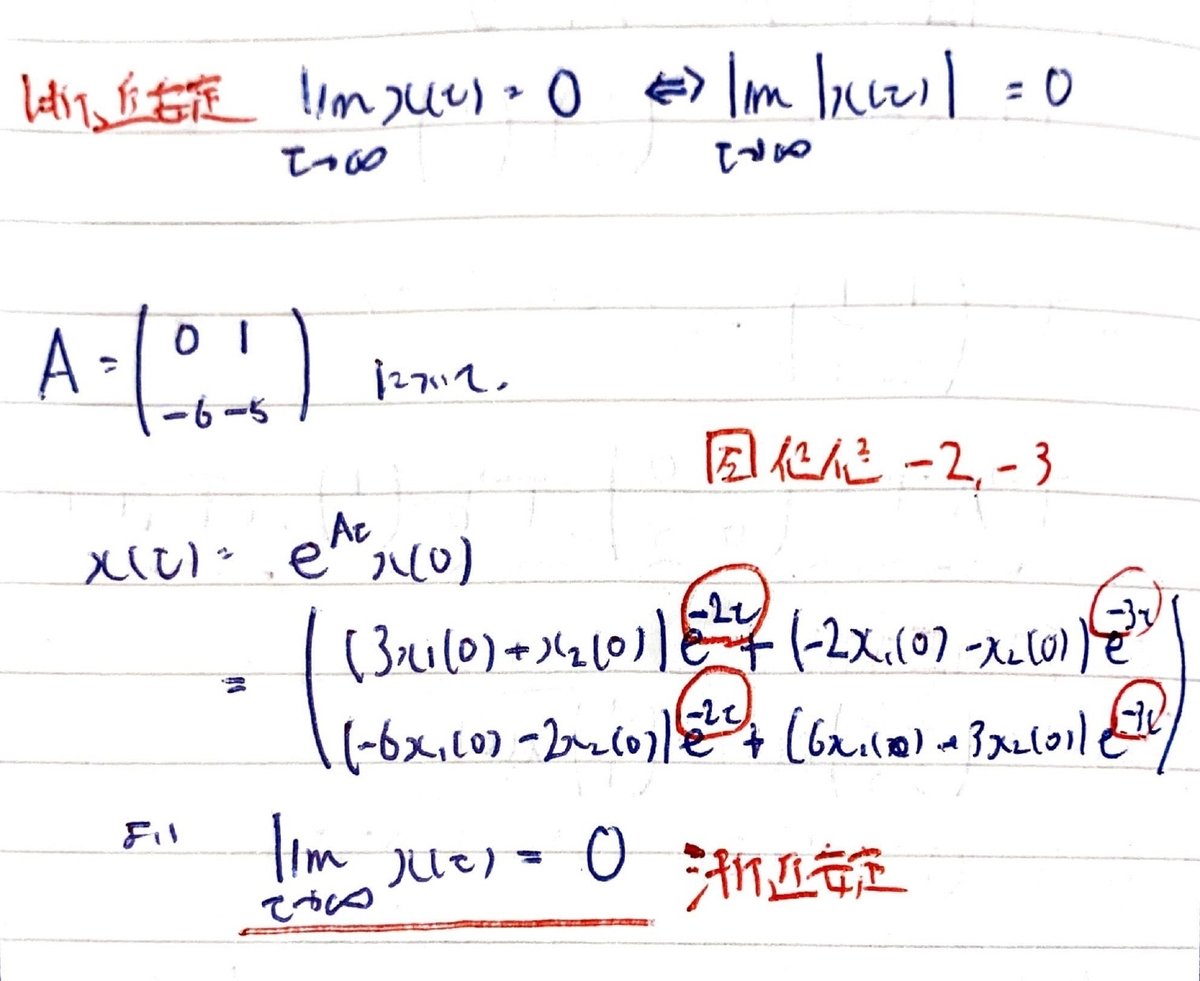
「固有値の実部が負」であることが漸近安定の必要十分条件であることは,指数行列の性質により示すことができる。

具体例を見ていく。実部が全て負ならば漸近安定である。
一つでも実部が正であれば不安定である。

固有値に実部0が含まれる場合。解は一定範囲を振動するため,漸近安定かどうかは判定できないが,リアプノフ安定であることは言える。

一方でこちらの場合ではリアプノフ安定でもなく,不安定である。

リアプノフ方程式を実際に解いてみる。

ここでPは対角化のような形で示すことができる。

初期値を与えたときの解を示す。

本記事のもくじはこちら: