
Sports Biomechanics Geek #1 〜身体運動を拘束するもの〜

マガジン「動かして学ぶバイオメカニクス」は,スポーツ・バイオメカニクスで必要な力学を,実際の計測データをPythonコードで計算を行いながら学ぶための記事である.しかし,この記事を読んでも,実際の身体運動の物理的意味はあまり見えてこないかもしれない.そこでこのマガジンでは,もう少し踏み込み身体運動の物理的意味に焦点を移した話題を取り上げる.ただし話題は体系的でもなく,個人の感想である.
今回と次回は,このマガジンでしばらく述べることを想定して内容を俯瞰して述べる.俯瞰しすぎて抽象的かもしれない.お許しいただきたい.
はじめに
身体運動におけるヒトらしさを調べるのがバイオメカニクスやスポーツ・バイオメカニクスの目的の一つと言える.その運動は当然ながら力学法則に従う.しかし,それは単なる物体の運動とは明らかに異なり,(これまでの)ロボットの運動とも大きく異なる.ヒトの運動はさらに物理法則以上の何かがプラスアルファの拘束を与えているからこそ,ヒトらしい運動を実現する.
普通に歩いている人を見て「何故そのように動く?」と考える人は多くないだろう.野球の研究者も,普通に投球する人を見ていまさら「何故そのような動き方をする?」と考える人は多くないだろう.いわゆる投げる動作を行うことを前提に研究を行うのが普通だ.しかし,身体運動に関するバイオメカニクスはむしろそれを問い,「ヒトっぽさ」「ヒトらしさ」を考える学問と考えている.ボールの大きさや重さ,体格などの条件を与えて,あとは「投げろ」と司令だけで,ヒトらしい自律運動を生成する技術とも言える.なお,それが動かす原理自体がヒトらしいかどうかは別問題として,歩行ではCPG(central pattern generator)を利用することで,環境の変化に適応しながらヒトらしい歩行運動を生成することはすでに行われている.
このように,単なる物体の運動と異なり,ヒトや生物の運動には,ヒト(生物)らしい,ヒトっぽい運動が観察される.「っぽい」運動を,ここでは運動パターンと呼び,ヒトらしい運動として拘束することを身体運動の運動パターン形成と呼ぶこととする.
その何かを知るために,バイオメカニクスの研究では,エリートアスリートなどの巧みな運動と何かの「関係」を統計的に探ることで明らかにしようとすることが多い.つまり相関関係だ.しかし,それは「風が吹けば桶屋が儲かる」程度の弱い関係や「たまたま」の関係かもしれない.残念ながら「たまたま」はいくら積もっても「たまたま」にすぎない.motor controlの研究では,シナジー(synaergy)の御旗のもとに要素を最小の次元で記述する試みが盛んだ.多自由度や冗長性ある変数・要素から,運動を再現するものを少な次元で抽出するものをみつけることで,それが身体運動における協調(coordination)と考える.しかし,冗長性は身体運動の様々なレベルで存在し,研究の数ほどシナジーは見つかる.それで見つかった協調関係は何を意味するのだろう.相関と比べれば分析方法はかなり数理的に複雑化している.多自由度でノイズに埋もれている情報から,直交性ある変数に分解し,強い相関のあるものを見つけることはできるが,これも基本的には相関の延長だ.一見すると解析は科学的に見えるが,それは「たまたま」ではなく計測した運動以外で成立する組み合わせだろうか.
もう少しわかりやすく述べるなら,上手い人の真似をしたところで,うまくなるとは限らない.
問題はそこから物理的な理由や意味やメカニズムが見えるかどうかである.バイオメカニクスで知るべきことは,その関係を与える側の上位の拘束(constraints)であり,その拘束の物理的な意味である.英語では同じconstraintだが,分野によっては拘束を制約または束縛(または,binding)などと呼ぶことがある.
拘束といっても様々あり,数学的には等式拘束,不等式拘束もあれば,微分方程式(ダイナミクス)によって拘束されることもあれば,身体のように関節で結び付けられているような構造の幾何学的拘束もある.幾何学拘束を微分することで力学拘束になる.身体運動で考える拘束といっても様々の種類が対象となる.
たまたま野球で成り立つ関係性や,たまたまゴルフで見られる法則ではななく,同じヒトが行う運動であるなら,それらを拘束する共通する制約が野球もゴルフも支配するだろう.スポーツと日常の運動でもそれは共通する拘束に違いない.その拘束が,ゴルフ,野球,日常運動という異なる運動目的に応じて異なるパターンで出現する.関係性ではなく,俯瞰して拘束を理解することができれば「たまたま」にはならないはずである.
ローカルな視点の関係性も決して無意味ではない.その関係性から導かれたアドバイスなど,それはそれで有用だ.ただし特定の競技ばかり研究する方はは時々立ち止まって俯瞰して考えてほしい.理解したつもりの関係性は,狭い世界で成り立っている現象で,たまたま眼の前の選手だけで成立するだけではないのかなどと.
幸いなことに身体運動を拘束するルールは構造や力学に由来するものがほとんどだ.そこで読者は次のように思うかもしれない,「いやいや,迷い,緊張,疲労が運動に影響するではないか?」と.身体を動かすためには制御系を構成する神経系の仕組みが重要で,もちろんそれらは影響する.我々の運動パターンは神経系の都合で動いていることは間違いない.しかし身体を動かすルール自体は神経系の都合よって決められているわけではなく,ここでは力学が運動パターンを支配し,神経系はそれを学習し,遂行しているだけという立場である.我々ヒトが運動する運動パターンをもっとも強く拘束するのは,つまり上位に拘束するものは力学由来と考えている.ちなみに,このことを述べて不服そうにされた神経科学者はいらっしゃるが,文句を言われたことはない.
運動パターンを形成するメカニズムの最も重要な部分は,力学由来なので,それほど突飛なロジックが我々の運動を支配することはない.想定内の論理が運動支配するなら,面白みが欠けてしまうという側面もあるが,バイオメカニクスの利点は,その拘束する物理的理由を演繹的な流れと帰納的な流れの両方向から探求することができるところにある.演繹的,すなわち既知のルールを利用することにより,必ずしもNの数を稼ぐ必要もない.線形性しか関係がないなら統計が必要だが,数理によって複雑な運動を予想するなら数で勝負する必要なないだろう.その利点をいかした研究によって,「たまたま」の関係性を排除する体系的な理論の構築を築くことができる.関係性を拘束するルールがわかれば,未知の問題を解決することにつながるだろうし,実際に選手の問題を解決する緒になるだろう.
このマガジンでは,演繹的な視点からの話題提供を目指したい.理解してしまえば,ごくごく当たり前の結論が得られることが,力学ベースの学問であるバイオメカニクスのよいところであり,ひょっとするとつまらないところかもしれない.
ロボットはヒトが制御しやすいシステムを作るため,力学よりも制御系が上位に位置する.極端に述べると,効率が悪くロボットが疲れようが,壊れようが構わない.ここが生物のような自然のシステムとの違いである(補足1).しかし,ロボット工学は冗長性からの開放が切実な問題なのでまだ理解できるが,神経科学も冗長性の問題に固執しすぎて,それをシナジーという関係性から探ろうとしているが,それはヒトの運動の理解につながるだろうか.
身体運動を拘束するもの
これだけではヒトらしい運動を生成するには至らないが,ここでは身体運動を強く拘束する要素をいくつか取り上げる.
1.筋肉の粘性特性

そのひとつはアクチュエータである筋肉の力学的性質であり,さらに限定するなら筋肉の粘性特性である.筋肉とモータを比較すると,筋肉のほうが出力効率は高いかもしれないが,ヒトらしさを与える力学的性質は普通のモータと大きな違いはさほどないかもしれいない.アクチュエータの多くは,高速に運動する(収縮する)につれアクチュエータが持つ粘性抵抗のためエネルギーを消散し,アクチュエータの外部に発揮する力は小さくなる.つまり高速に動けば動くほど外部に行う仕事量が減る.この粘性抵抗の特性が身体運動の特徴を大きく左右するが,モータも粘性抵抗の性質を有するので,その意味でロボットでも事情は同じだ.
ノーベル賞を受賞したA.V. Hillの筋の力学的性質は有名であるが,図2に一般的な筋肉の収束速度と力の関係を簡単にまとめておくと,
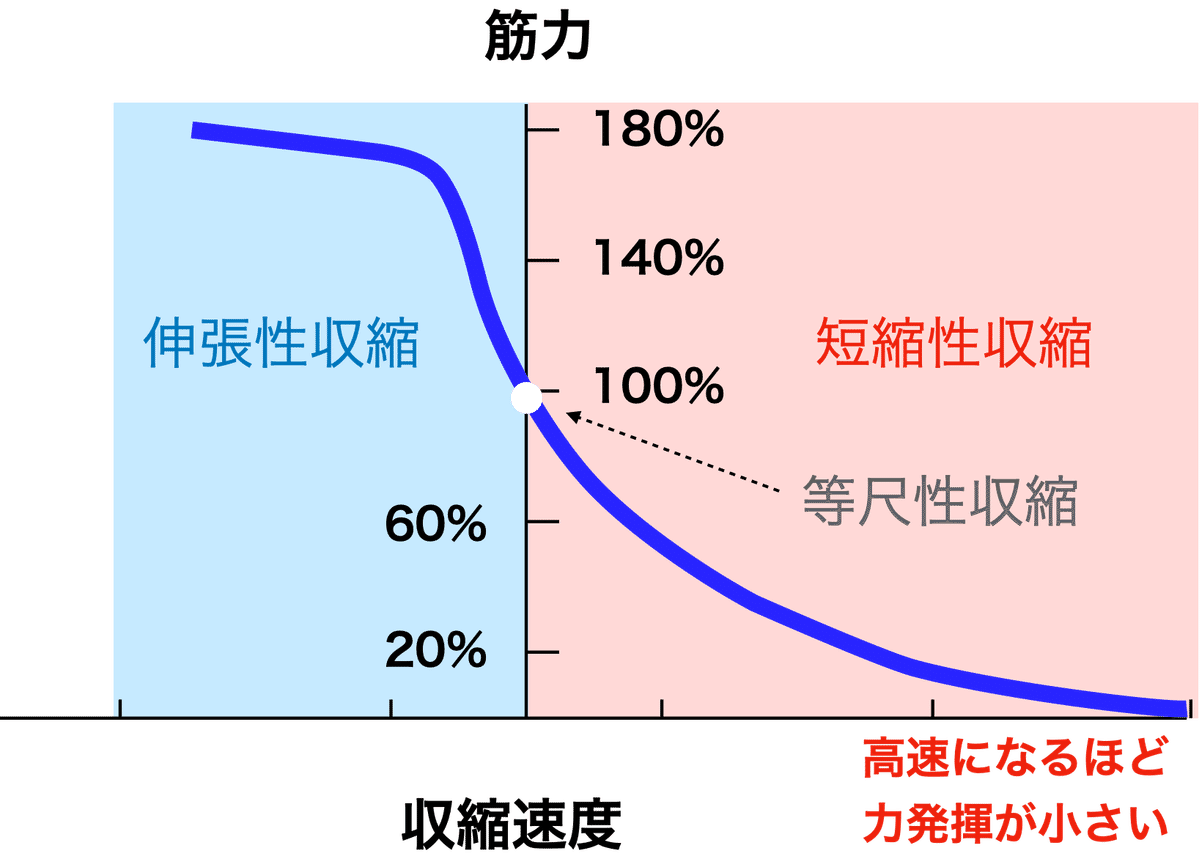
のようになる.
筋肉が収縮する際,筋肉の粘性抵抗によってはエネルギーは消散する.収縮し速度を持つほど筋肉の外部には発揮(出力)されずに筋肉内でエネルギーが失われる(図3).身体を動かしたいが,筋肉の収縮によって動くことはエネルギーを失いことを意味する.一方,筋肉に含まれる「弾性要素」はエネルギーを蓄積するが消散しない.増えも減りもしない.弾性エネルギーの蓄積で身体運動の特徴を記述しようという試みは,たとえばSSC (Stretch-Shortening Cycle)でも見られるが,本当に筋肉や腱自体が大きなエネルギーを蓄えることはできるだろうか.また.そもそもエネルギーをローカル蓄えたところで,運動においてとくに良いことはあるのだろうか.身体の弾性的な振る舞いと,筋や腱の受動的な要素としての弾性の利用は本質的に異なることに注意が必要だ(補足2).
筋線維には弾性要素と粘性要素が並列に結合していると数理モデルでは考えられているが,多くのモデルでは弾性要素と粘性要素は並列に存在するので,収縮すれば弾性要素も粘性要素も作用する.すると,収縮時の粘性抵抗によって消散するエネルギーを減らすことが,エネルギーを有効利用することにつながる.無駄を省く動かし方とも言えるが,それが身体運動の特徴を形成していると考えている.つまり,この筋肉の粘性特性のダイナミクスのほうが運動を強く拘束するだろう.
スポーツではとかくバネのような動き,つまり弾性を利用した動きが強調されるが,図3のような粘性を含む特性が身体運動を特徴づけていることに,多くの人は気づいていないのではないだろうか.
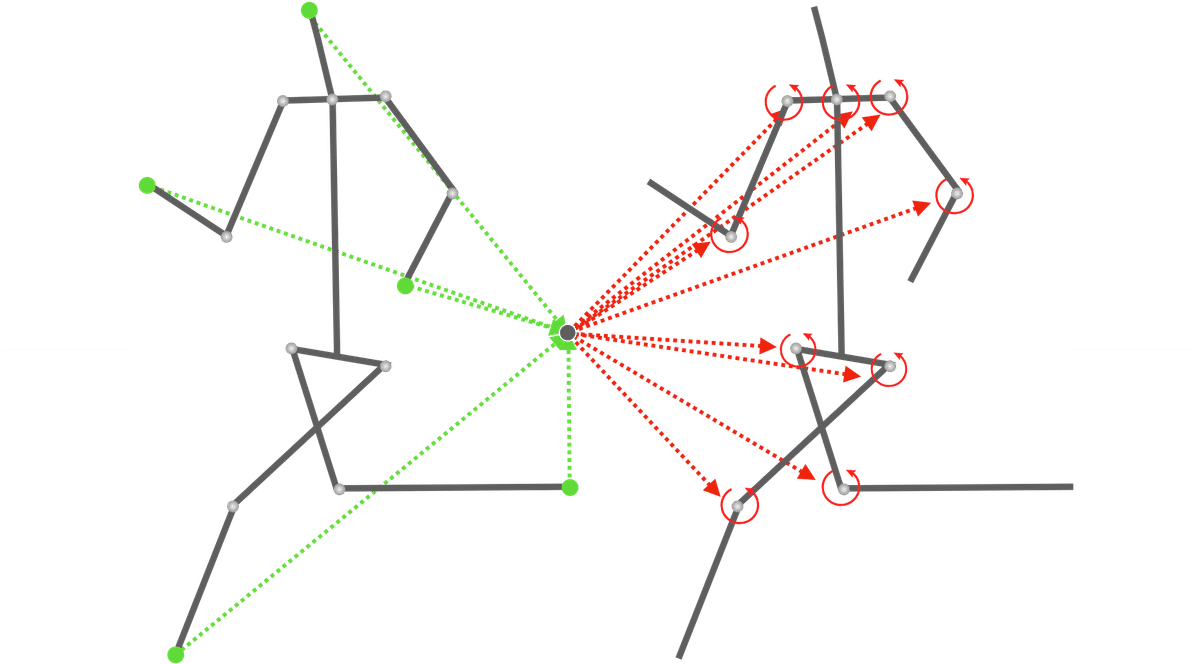
2.リンク機構

身体のもうひとつの重要な特徴は身体の幾何学構造で,それはロボットと同じように身体の各部位を関節で結合するリンク機構を有する多体系の構造である.バイオメカニクスでは剛体リンクモデル,骨格モデル,セグメントモデルなどと呼んでいる.機械工学におけるマルチボディダイナミクスの対象でもある.
もし二関節筋を含む筋肉が単にそのまわりの関節を動かすことだけにに寄与するのなら,ヒトらしい運動パターンを形成する上でリンク機構はさほど意味を持たないだろう.それはローカルな運動の結合にすぎない.ロボティクスの古典的な制御では,手先や関節の軌道を時間を含めてプランし,その軌道計画に基づいて,ロボットの関節に作用するトルクを逆動力学によって計算し,そのトルクでアクチュエータの駆動力を与えるという制御方法がとられることがある.そのような制御方法の中では,目標軌道からトルクを計算する際の単なるパラメータで,リンク機構はただの幾何学的な拘束に過ぎない.
実際,相対的にスケールの小さい昆虫では,アクチュエータに対する負荷の割合が小さくなり,ロボットっぽい運動というか,全身を有効利用した運動の割合が減っているのではないだろうか.しかし,次第に「スケール」が大きくなるにつれ,筋肉にとって身体は重くなり,次第にその関節を自由に動かすだけの余力が減ることによって,他の部位からの動力を伝達してもらわなくては運動ができなくなる.このとき,多体系のリンク機構という「幾何学的な拘束」も,身体運動の力学を拘束し,運動パターンを形成することになる.その典型がスイング運動で,投球,キック動作で観察される振り子運動とその動力を生み出す下肢や体幹の運動だろう(補足3).
負荷の分配やエネルギーの伝達を考慮する際には,この多関節構造が幾何学的に強く拘束する.
ただし,2(リンク機構)の拘束は,1の粘性と次の3の効率と比較すると,重要性は少し低いかもしれない.
3.効率
効率は「経済性」と言い換えることができ,「効率を高めること」は「無駄を省くこと」とも言える.生命維持にとって必須の要素である.スポーツのような運動は一見すると無駄など度外視し,記録や競争に勝つためには最大効果を狙う要素がもっとあってもよい気がする.短距離走のように走速度が大きく変わっても,走るという運動パターンはそれほど違いはないことを考えると,常に無駄を削ぐように進化が進み,それに強く拘束されているようだ.しかし,このように形容しては大変失礼な話だが,やはり無駄な動きをしていると感じるプロやエリートアスリートも存在する.無駄を省く進化と最大効果を狙ったダイナミックな進化が交錯し,螺旋階段のように進化を遂げているのかもしれない.
1,2は構造的な強い拘束である.一方,多少,生理学的,生物学的な理由も含むが,効率は緩い拘束を形成する.1,2がハード的な拘束であるのに対して,3の効率はソフト的,生理学的な拘束ともいえる.
我々は,疲れては運動を持続できないし,局所的に疲労すれば怪我をし,極論すると効率の悪い運動を行い続けていては生きていけない.これはスポーツにおける運動だけに当てはまるのではなく,日常生活に行う身体運動でも同じである.むしろスポーツの運動を観察することで,その拘束を顕在化することで,日常行う身体運動を拘束する数理を発見できるだろう.
すこし矛盾してしまうかもしれないが,ヒトは最大効果を狙うためには,一見すると無駄な成分もセットで作用させることも多々ある.一口に効率良いっても,身体運動における効率の意味は,工学の効率とは工学とは大きく異なるので注意が必要だ.経済性にも種類や優先順位があり,運動にとっては必要な無駄というものも発生する.
ここで述べる拘束における「強い・弱い」とは抽象的だが,ここでは,運動方程式のように数理的に完全に記述できる拘束を最も強い拘束と呼ぶ.もちろんモデル誤差は発生する.一方,緩い拘束とは,勾配(gradient)のような拘束を対象とし,可動域のような不等式拘束も緩い拘束と言える.ただし,勾配は一位に運動を決定はしないが,きつい勾配によって運動をより強く拘束することはできる.効率は等式拘束や微分方程式で記述するよりは,勾配のような緩い拘束となる.もし身体運動を拘束する条件が強すぎれば,運動において個性はあまり出現しないだろう.体格などの個人差以外に個性を観察できる理由には,戦略などの違いもあるが,それを許す冗長性や拘束に緩さがあることも関係するだろう.

身体運動(場合によっては生物の運動)は,この3つが相互に関連して,ヒトらしい(生物らしい)運動パターンを形成する(と考えている).ここで述べる運動パターンは抽象的だが,ヒトや生物が形成する身体の運動の時空間パターンで,それは上記の3つが中心となって拘束し,生命でない(制御されていない)人工物の運動のパターンと区別している.ただし,将来的にはロボットの運動との違いも少なくなってくることだろう.
たとえば,運動連鎖やムチ運動と呼ばえる順序性の特徴は,このリンク機構と筋肉の粘性特性の幾何学的・力学的拘束の中で,エネルギーの有効利用を考えた結果,発生する運動パターンである.
正確性とトレードオフ関係
なお,効率と「正確性」は比較的相性がよい.しかし,正確性とスポーツでさらに必要とされる「速度」などとは相性が悪い.神経科学ではSpeed–Accuracy Tradeoffなどと呼ばれるように,それらの間には構造的な理由などから負の相関や,反比例の関係が一般的には成立する.しかし,このような関係はむしろ生物にとって普通のことで,弁証法的な観点からは進化にとってはゆらぎ(fluctuation)をもたらすために必要な関係だろう.弁証法のアウフヘーベン(止揚)はこの相反する関係を解消し,両立するようにより高次の段階で解決することをさすが,野球の投手であれば,高速な投球と正確性や経済性を両立し解決している.これらについては,またどこかで述べることとする.
効率と負荷の分配
動かそうとする物体の質量が大きくなる場合もそうだが,スポーツのように速く運動することによっても,身体にとっては負荷が大きくなる.身体にとって相対的に負荷が大きくなるにつれ,その負荷近辺の筋肉では操作が困難となり,筋骨格系を通じて,隣の部位に負荷が伝搬する.
スポーツのような運動では特に,負荷から離れた大きな出力を持つ筋群の動力を負荷に伝達することで,負担を減らし,身体全体に仕事を分配することで効率をあげることはよく行われる.
これは多関節(リンク)機構での分配の例である.ロボティクスや制御では,これは冗長性(redundancy)の文脈で語られることが多い.
一方,ひとつの関節に絞ってみても,関節には複数の筋群が寄与するが,大きな筋群がたくさん仕事を行い負担を分配することが知られている.このような負荷の分配は,ひとつの関節レベルでも行われている.
多関節に渡る分配・分散では,部位間の「力やエネルギーの伝達」をともなう.その際に,1.筋肉の粘性特性,2.骨格系の構造と,3の効率が密接に関係する.
効率を構成するもの
機械力学などが定義する効率は,身体運動の効率を考える上では,大雑把な概念である.たとえば,機械力学的発想で身体運動の効率を考えると,マラソンを行ったときに,単純に物体が移動に使われる総和のエネルギーを消費した総和のエネルギーで割るような計算を行ってしまう.これは積分的な発想である.
しかし,身体が求めていることは総和での効率ではなく,単位時間あたりの効率で,その積分値が最小ではなくても,ここの瞬間に流れる(伝達される)エネルギーの最大化を重視する傾向にある.
効率については,またどこかで話をする.
手先効果器と関節
身体運動は関節運動の連鎖である.そして多くの場合,運動の目的は「末端部分で拘束される」.野球の投球では,ボールに与える力とモーメントが最終的にボールの運動を拘束し,ランニングでは足部と地面間に作用する力が走速度を束縛する.このように「道具や環境と接触する末端の力学が運動を最終的に拘束する」ことが多い.これはスポーツだけではなく,多くの日常の身体運動でも当てはまることが多い.
ところが,そのことを無視し(忘れ),何かと何かの関係性だけを論じても致し方ないことが多い.その出口や最終出力との関係性を論じる数理が常に求められる.
例えばボールの回転を論じるなら,ボールに回転を与える身体とボール間のダイナミクスを明らかにすべきだろう.ランニングならピッチとストライドの関係性や,腸腰筋の強さは重要だろうが,それらの関係よりも,その前に身体と地面間の力学を論じことが求められる.その出口や末端の拘束を満たさない限りは,その運動を満たさないということをよく考えるべきだろう.まずは環境(道具)と身体間の拘束関係を明らかにすることが,バイオメカニクスでは重要課題だろう.それをほったらかして議論をしても深い理解にはつながらないじはずだ.
ロボットでは,ロボットハンドを手先効果器などと呼び,操作する手先と各関節との関係を論じる事が多い.そして手先と関節の幾何学的な関係を論じる上で重要となるのがヤコビ行列(Jacobian matrix)である.分配にも関係する.これについても,またどこかで述べることとする.
終わりに
バイオメカニクスの研究はとかく狭い領域での関係性だけを観察しがちだ.もう一つ二つ,上位のところから俯瞰する研究を目指したい.歩行の自律的な運動生成のように,目標速度を与えて自律して投球するシミュレータの開発など,そういったレベルの研究を目指す研究者が出てきてほしい.筆者は運動生成AI(補足4)にはあまり興味がないし,それが運動の理解にどれだけ貢献するかは疑問が大いにあるが,仮にできるならそれはやっておくべきだ.
身体運動の運動パターン形成を強く拘束するものとして,以上の話題を取り上げたが,これらを結びつけるのが力学(ダイナミクス)である.次回は,これらの拘束を,並進と回転の力学との対比や,エネルギーから述べる.
補足
補足1:ロボットの対比
生物やヒトの運動のメカニズムを,力学に根拠を求めるのか,制御に根拠を求めるのかで大きな分かれ道だが,筆者は生物を理解するためには力学をベースに理解することが優先されるという立場で,さらに述べるなら制御ベースの身体運動の理解には限界があるだろうと考えている.緻密,巧みさ,精緻さはの実現は力学と無関係に数理的に実現できる要素は多く,ロボットがヒトに近づいているかもしれないし,超えている部分はあるだろう.しかし,実際,とくにヒューマノイドロボットの殆どに生命らしさを感じるものは少ない.ただし,その中でもBostonDynamicsのロボットは,アクロバティックな運動を実現し,ヒトらしさや,知性すら感じるが,これがヒトらしい制御を行っているかどうかの議論は別途必要だろう.ヒトらしさの追求がロボットでどこまで意味を持つかは別問題で,全く異なる原理で制御を行い,ヒトを超えるヒューマノイド型ロボットが近い未来に登場することはあるだろうが,いまのままで,ロボットを通して身体運動を理解することは,当分ないだろうというのが筆者の予想だが,これはばかりはわからない.
「ロボットはもっとかしこくなれるか」という問いがタイトルとなっている書籍(文献1)があるが,負荷の小さいロボットでは発展することはあっても,ヒューマノイドロボットのようにスケールの大きいロボットでは,制御論中心のロボットでは破綻するだろうというのが筆者の予測である.きっと誰かが何らかの方法で打破はされるだろうとも思うが,それが真にヒトらしいかどうかはわからない.
ロボットでは,冗長性(redundancy)の取り扱いも問題となる.制御システムを構築する上で厄介だ.ヒトを解析するだけの立場では,このような問題をとかく無視しがちなところがよろしくないところで,「運動を拘束するものがわかっても制御できなければ,それは正しい理解かわならないではないか」と,ロボティクスの研究者にお叱りを受けそうである.
バイオメカニクスのような身体運動科学の研究は制御の観点が不足し,ロボティクスでは効率や力学がおざなりになっていると感じている.
補足2:弾性の利用
身体全体の動きは,弾性を利用した動きのように見える.実際,ランニングなどでは床反力と身体重心の関係はそれに近い.身体全体の硬さを床の弾性に適応(インピーダンスマッチング)することは,パフォーマンスを上げるために物理的に意味がある.したがって,「環境に適応した硬さを持つという」意味で,身体全体が弾性的な「振る舞い」をすることは合理的だ.
しかし,これが筋や腱自体の性質由来かどうかは別問題である.SSC(Stretch-Shortening Cycle)の文脈では,弾性によってエネルギーをローカルな筋や腱に蓄えることに意味を持たせている.しかし,考えてみてほしい,筋や腱自体の変位と筋張力の関係が運動中,それほど強い弾性的な出力を示しているだろうか.しかも腱の硬さは調節が困難である.そもそもローカルにエネルギーを蓄える必要などあるだろうか.筋腱の弾性の有効利用は期待できないと考えるほうが自然だろう.
ロボットではインピーダンス制御という制御法がある.ロボットの手先などに,「あたかも」ボールなどの弾性要素が存在するように感じさせる制御である.弾性要素など持たない普通のモータを利用し,手先で弾性の性質を示すような変位と力を与えるような制御を行えば,弾性のような「振る舞い」をロボットが手先に人工的・仮想的に作ることができる.ヒトも筋肉というアクチュエータを有するのでインピーダンス制御のように身体の足先や手先から力発揮を行い,「身体全体の見かけ上の硬さ」を作ることができる.
スーパーボールが高い反発特性を持つ理由は,床の硬さとマッチングした硬さ(弾性)をボールが持つために高く反発することによる.そこでインピーダンス制御のように身体全体や関節で制御することで身体が硬くなるように振る舞えば,身体はそのような弾性的な動きを実現できる.実際,ランニングや跳躍では,身体を相当硬くして運動していることが推察される.
これらの事実は筋肉や腱が弾性的性質を持つことやそれを利用することを否定はしない.しかし,筋肉や腱自体の持つ弾性的な性質が,反動動作をおこなう主たる理由ととしてまことしやかに語られていることを疑う余地はある.仮に腱の弾性が運動に強く影響(寄与)するなら,腱はもっと発達するはずだ.
筆者の理解は正しくないかもしれないが,SSC(Stretch-Shortening Cycle)は,これまで古くから関節空間で語られてきた反動動作や運動連鎖という関係性を,筋空間に落とし込み,筋が一旦反対方向に引っ張られる(伸長する)理由を考え,筋・腱の弾性や伸張反射にその由来を落とし込もうとしている.筋・腱の弾性は適応しトレーニングによってさらに運動に貢献はするだろう.しかし,それが反動動作を必要とする本質だろうか.そもそもエネルギーを一旦ローカルに蓄えておく理由はなんだろうか.反動動作が筋肉の力学と関係することは予想されるが,異なる力学的理由があると考えるほうが自然ではないだろうか.少なくとも,垂直跳びや投擲のような,比較的大きな可動域を利用し運動する時間の長い動作において,SSCの文脈で反動動作を語るのは論外だろう.では,プライオメトリックのような運動ではどうだろう.やはり,違うんじゃないの?と思うのは筆者だけだろうか.このマガジンでは,その反論の証拠を示すことはできなさそうだが,異なるロジックで説明することを試みる.
この補足2の冒頭で述べたが,反動動作が観察される理由は,受動的な弾性要素としてエネルギーをローカルに蓄積したいがためではなく,身体全体で弾性的に「振る舞う」ことよる環境適応という意味が大きいだろう.制御によって筋肉がそのように振る舞っているだけなの(かもしれないの)に,勘違いをしてはいけない.
補足3:解剖学的拘束の例
スイング運動は二重振り子のように運動を行うことで,効率よくエネルギーを伝達するという意味で,リンク機構によって拘束された運動である.
一方,ゴルフのようなスイング運動で腰や体幹の回転運動も観察される.これは解剖学的な構造によって拘束された運動で,体幹を回転させること自体にさほど物理的な意味はない.エネルギーや力を伝達する上で,身体の幾何学的構造があるがゆえに致し方なく伝達の結果として,体幹を回転してるだけだ.許された自由度がそれしかないというのが現状だ.回転速度が最大化しているときには,すでに伝達も終わっている.床とゴルフクラブ間で力やエネルギーを伝達する際に,身体間に主として上下方向のやり取りが発生するが,その力の相互作用を行った結果,解剖学的な拘束があるがゆえに,許された自由度として腰などをまわすしかなかったと考えるほうが自然だ.同様に,腕とゴルフクラブを二重振り子のように動かすことが力学的に合理的だが,ゴルフクラブをインパクト近辺で腕で回旋する際も,クラブと腕間が二重振り子のように運動するため,すなわちまるで腕とクラブ間が蝶番関節にように振る舞わせるためには,回内外や内外旋運動うを行わせるしかない.これらは幾何学的構造由来の原因である.腰の回転運動や回内外運動を行ったほうが加速するというわけではない.ただ許された自由度がそれしかなかったからと表現してもさほど過ちではないはずだ.
補足4:運動の生成
運動生成AIのような呼称はおそらくまだ使われていないだろう.しかし,昨今の生成AIの流行から,いずれそのようなたぐいの名称は使われるだろう.身体運動をAIで自動生成するというストーリーは誰もが思うところだし.ただし,昔から強化学習によって,ヒトらしくないけど運動を生成する研究はあった.最適化で運動を生成することにチャレンジする研究もあるが,うまくいっている例はあまりない.失敗している理由は,自由度などいろいろとあるが,うまく行かない理由の本質はそこにヒトらしさの規範がが欠けているからだろう.
CPGによる自律的な歩行運動の生成は比較的うまくいっている.しかし,生成するためにパラメータの神業的な調整が必要だし,ヒトはCPGで制御しているのか,CPGが自律運動を形成する本質かというと疑問の余地はある.
参考文献
1)小林祐一,ロボットはもっと賢くなれるか.森北出版,2020.



【解析・受託開発について】
スポーツセンシングでは,豊富な知見を持つ,研究者や各種エンジニアが研究・開発のお手伝いをしております.研究・開発でお困りの方は,ぜひスポーツセンシングにご相談ください.
【例】
・データ解析の代行
・受託開発
(ハードウェア、組込みソフトウェア、PC/モバイルアプリ)
・測定システム構築に関するコンサルティング など
その他,幅広い分野をカバーしておりますので,まずはお気軽にお問い合わせください.
【データの計測について】
スポーツセンシング社のスタジオで,フォースプレートやモーションキャプチャを利用した計測も行えます.出力されるデータと,ここで示したプログラム(入力データの取り込み関数を少々改変する必要があるが)で,同様な解析を行えますので,まずはお気軽にお問い合わせください.