
古武術ロボット

古武術の達人が使うワザを繰り出すロボットを紹介します。
達人の押し動作
古武術の達人、身体技法研究家の甲野善紀氏は、巧みに運動することで、相手の身体を動かすことが出来ます。甲野氏の生み出した独特の身体の使い方は、介護やスポーツにも応用されています。
甲野氏の巧みな運動を科学的に解析すれば、これまでにないロボットの設計や制御方法が明らかになる可能性があります。
尾形邦裕研究員(産業技術研究所)は、東京大学の博士課程在学時に、達人の運動を計測し、ヒューマノイドロボットの指標を用いて、様々なワザの原理を明らかにしました。
甲野氏の巧みなワザの一つに、押し動作があります。両腕で押し返す相手を片腕で押して、後退させることができます。不思議なことに、押された相手はなぜか押し返せず、強い力を感じたわけでもないのに、押されて後退してしまいます。

達人は、特殊な手の握りとフォームで押し動作を行います。
そうすることで、
(1) 前方への身体が回転する勢いを利用し、
(2) 拮抗する指伸筋と指屈筋を賦活させて肘の剛性を高め、
(3) 予期せぬタイミングで予想外の方向に押すことで、
相手を後退させることが分かっていました。
その知見を踏まえて、私は達人のワザを再現するヒト型ロボットを開発しました。
開発したロボット
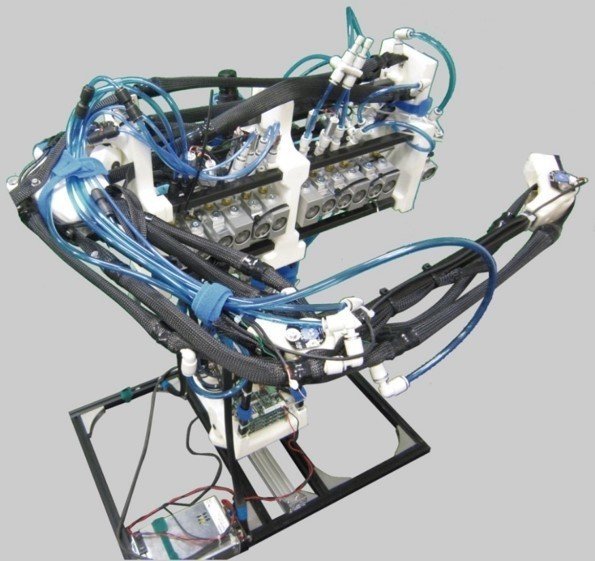
ロボットには右腕と体幹と腰があり、台座に固定されています。人間と同程度の大きさと重さがあり、腰と肩と肘と手首の関節があります。

関節は、12本の空気圧人工筋で動いています。人工筋の中には、人間の指伸筋と指屈筋を模した筋が配置されているので、達人のような筋の使い方ができます。腰周りに前後に動くことで、達人の倒れこむような動きを真似ることが出来ます。人工筋の中の空気が、人間とロボットが押し合う力を受け止めます。
ロボットによる押し動作の再現
達人の動きを参考にして人工筋の活動パタンを決め、達人の押し動作を再現しました。
まとめ
達人の押し動作を再現するロボットについて紹介しました。私の修士時代の研究で、過去に書いた自己紹介の古武術ロボットの詳細になります。
この研究はスポーツロボットを使ってヒトを調べる一例でもあります。
この研究でロボットは決まった動きをしていました。本物の達人に近づけるためには、相手をよく見て動きを変える必要があります。そういうロボットの実現に向けて、研究を進めています。