
CanSatつくった

CanSatは衛星開発の登竜門として衛星の開発を実際に想定しながら作成しました.ロボットを作るように開発すれば地面を走るだけだろうから作れるだろうと考えていたところいくつか失敗したので記録しておきます.
設計・製作段階
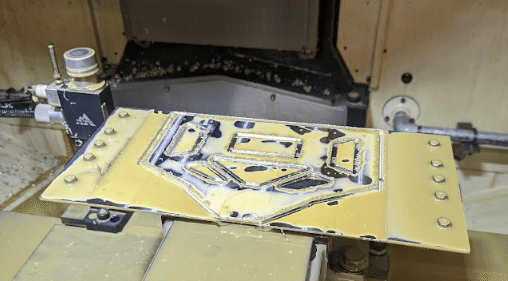
CanSatの製作に関して普段ならば3Dプリンターを使うところですが,強度が必要であるという面や単純に久しぶりにCNCで遊びたい,肉抜きのかっこいい形状(できれば軽量最適化)をしてみたいという思いからアルミによる構体の製作に挑戦しました.
そして容量の安全率を10近くとったバッテリー,パラシュートが絶対絡まらないようにコンベックステープをたくさん貼ったエンベロープ(パラシュートとCanSatをつなぐ入れ物)を諸々組み合わせて組み上げたところ,重量がルールの150%でした.
これには
①パラシュートとエンベロープが重いのにもかかわらず設計段階で評価しようとせずだいたい100gくらいで組んでいた.実際は300gほどであった.
②CAD内で想定していた電装部品の重さが実際とずれていた.
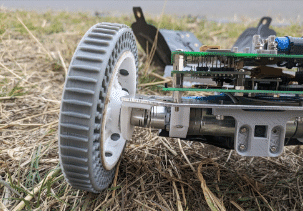
③3DプリントしたTPU製のタイヤが重かった.(CAD内のTPU密度を間違えていた)
ことが原因に挙げられ,CanSat本体だけでなくすべての部品で設計評価するべきでした.
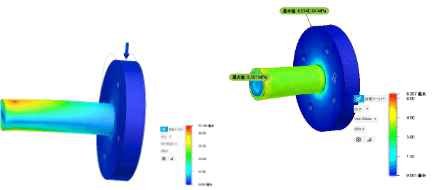
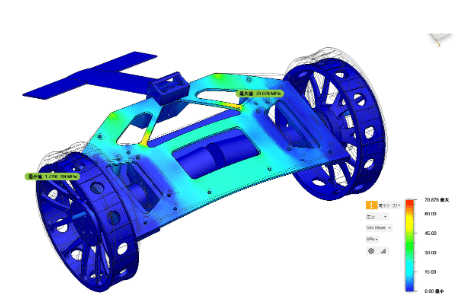
強度評価
実際にパラシュートで投下させたところ機体のカップリングに永久ひずみが残ってしまいました.これは筐体の強度評価はしていたものの部品選定でカップリングの振動吸収のみで選定したためで,強度が足りず塑性変形してしまいました.
大会本番
このCanSatは種子島ロケットコンテストという大会に出場させました.結果としてはパラシュートから落下させ開放して走り出した瞬間にパラシュートの紐に絡まってしまい停止しました.これは
①パラシュートの紐がばらばらになるようにすることで数本絡まってもそのまま巻き込んで走行できるような構造にする
②パラシュートが絡まりづらいように凹凸が少ないタイヤにする
③画像認識でパラシュート周辺をよける
などの対策をすることで回避できたパターンではないかと考えています.

CanSatは今回は構造屋さんで製作しましたがテストするときに自分でフィードバックできるくらいには制御がんばらないとなと思ったので学校で習った理論を反映させてこの機体動かしてみようかなと思っています.まずはモーターのPID制御からかな…