
スポーツ技術のバイオメカニクスにおける解釈論上の諸問題 第3回 身体の動きを記述する方法:モーションキャプチャ―から全身の加速度算出まで

前回 因果的説明と目的論的説明を区別する必要性
スポーツ技術のバイオメカニクスにおける解釈論上の諸問題 記事一覧
1. はじめに
前回まで、バイオメカニクス的動作解析研究における標準的(基本的)研究手法とは、動作を記録し、そこから全身の筋が発揮している力を推定するというものであるということについて、ところどころで言及してきました。しかし、その実態については特に紹介することなく話を進めてきました。スポーツバイオメカニクスについて専門的に学んでいる方々にとってはそれでも問題ないかもしれませんが、それ以外の読者の方々にとっては、今後の議論を円滑に進める上でも、このあたりで一旦、私が標準的研究手法と呼んでいるアプローチの概略について整理しておく必要がありそうです。
これまでの回で私が「バイオメカニクス的動作解析における標準的研究手法」という表現によって想定していた研究手法は、さらに二つの段階に分けてとらえることが可能です。一つめの段階とは、関心を持った身体動作を計測し、そこから全身の大まかな部位・パーツ(大腿、下腿、上腕、前腕、体幹など)ごとの、時々刻々における加速度を算出するというものです。二つめの段階とは、算出された加速度についての情報を活用して、全身の筋が発揮している力(次回詳しくお話ししますが、正確には「関節トルク」と呼ばれるもの)を推定するというものです。
今回は、一段階目の作業が具体的にはどのようなものであるかということについて、その基本的考え方を紹介したいと思います。元々は二段階目の作業まで含めて、今回一気に取り扱う計画だったのですが、原稿を書き始めてみると、分量があまりにも多くなりすぎることが分かったので、小分けにすることにしました。
2. マーカーから反射される光の記録
身体運動中に全身の筋が発揮している力を推定するための最初のステップは、分析対象としたい身体動作を動作解析専用のカメラによって記録することです。これが、モーションキャプチャ―と呼ばれている作業です。スポーツ選手が全身に小さな球形の物体をつけて、多数のカメラに囲まれて計測を行っている様子をテレビ番組などで見たことがあるという方も多いのではないかと思います。このとき取得されている情報とはどのようなものなのかということからまずはお話ししたいと思います。
全身につけられた球形の物体は、球形に成形されたゴムなどの表面に、赤外線を反射する素材を貼りつけたものであり、「赤外線反射マーカー」などと呼ばれています(以下では単に「マーカー」と呼びます)。モーションキャプチャ―に用いるカメラは、赤外線を発するとともに、赤外線をとらえることができるようになっています。そのため、カメラから出された赤外線がマーカーによって反射される様子を記録することができます。
最近では、マーカーを使用せずに、身体動作を記録する方法の開発が活発に行われていますが、今回はこの点については触れずに、マーカーを使用した方法について紹介したいと思います。これは、一つには、私自身がマーカーを使用しない方法にそれほど詳しくないということがあります。しかし、それに加えて、動作を記録しそこから全身で発揮されている力を推定するという、バイオメカニクス的動作解析における標準的研究手法の基本的原理を理解する上では、マーカーを使用した方法を例として説明した方が分かりやすいと考えたからでもあります。
モーションキャプチャ―用のカメラによって記録されるのは、基本的にマーカーが反射する光のみです。したがって、図1のように下腿部の両端にマーカーをつけておくと、下腿部全体が記録されるのではなく、下腿部に取りつけられたマーカーのみが記録されることになります。私の在籍していた研究室では、基本的に1秒間に200回(0.005秒)というフレームレート(200FPS [Frames per Second] )で撮影を行っていました。したがって、1秒間の動作を記録すると、マーカーの位置を記録した撮影データが200フレーム(コマ)得られることになります。

ちなみに、取得された点(マーカー位置)の羅列について、隣接する点同士を線で結んでやって、パラパラ漫画のように表示してやると、スティックピクチャーと呼ばれる、棒人間が動いているような描画をコンピュータ上で表現することができます。この様子もバイオメカニクス的動作解析の実践例として、テレビ番組や動画サイトなどで見たことがあるという方も多いのではないかと思います。
3. マーカーの存在位置を数字で表現する
カメラによって記録されるのは、あくまでも「そのカメラから見たときに、どのような位置にマーカーがあるように見えるのか」ということです。実は、一台のカメラからマーカーがどのように見えているのかという情報のみでは、そのマーカー(マーカーが貼りつけられた身体部分)が、三次元空間上のどの位置に存在しているのかを確定することはできません。マーカーが存在している三次元空間上における位置を特定するためには、少なくとも二台のカメラによってマーカーが撮影されている必要があります。
例えば、図2のように、カメラAから見たときに、左下にマーカーが映っていた場合、カメラの比較的近くの場所にマーカーが存在する可能性もあれば、遠くに存在する可能性もあります。

ここでもう一台のカメラBが図3のように別の角度からマーカーを撮影しているとしましょう。この場合、カメラAから見て手前寄りの位置にマーカーが存在している場合には、カメラBの視点からは右の方にマーカーが存在しているように見えるはずです。一方で、カメラAから見て奥の方にマーカーが存在している場合には、カメラBの視点からは左の方にマーカーが存在しているように見えるはずです。

このように、複数台のカメラ位置からどのように見えているのかについての情報を統合することによって、身体に貼りつけられた一つ一つのマーカーについて、それぞれのマーカーが三次元空間上のどの位置に存在しているのかを特定することができます。
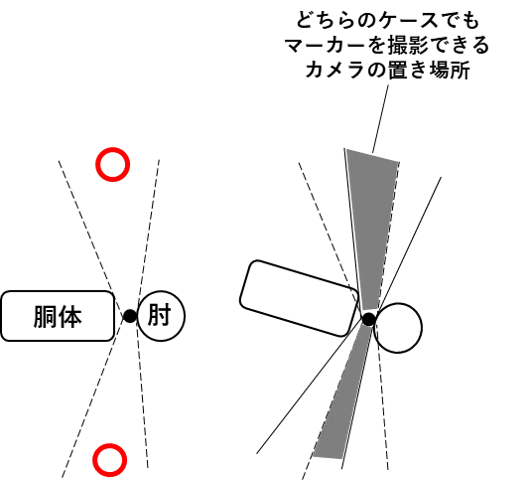
全身の三次元的動きを記録したい場合、身体にはおよそ50個程度のマーカーを貼りつけて計測を行います。そして、原則的にはすべての撮影フレームにおいて、すべてのマーカーを二台以上のカメラによって撮影する必要があります。図2や図3で示した場合のように、空間上にマーカーが単独で存在しているような場合には、この条件を充足するのはそれほど難しくないでしょうが、身体動作を記録する際には、マーカーを取りつけられた人自身の体の影にマーカーが隠れてしまい、カメラがマーカーの位置を捕捉することができないという事態が多発します。特に肘や膝の内側に取りつけられたマーカーを撮影できる視点は、図4のように非常に限定されます。
モーションキャプチャ―をしている光景を見たことがある方の中には、狭い範囲で実施される動作を記録する場合であっても、かなり多くの台数のカメラが、マーカーが取りつけられた人を取り囲むように配置された状態で撮影が行われていることが気になった人もいるかもしれません。撮影に多くの台数のカメラが用いられているのは、上のような必要性があるからなのです。
マーカーが三次元空間上のどこに存在しているのかが特定できたら、その位置を数字で表現することが、この後に続く力学的な分析を行う上で必要になります。そこで、三次元的な位置を数字で表現するための座標系を設定します。これは端的に言ってしまえば、空間に対して、前後、左右、上下の三方向についての目盛りを設定するという作業になります。図5のように目盛りを設定した場合、例えば、(x,y,z)=(3,4,5)という表記によって、原点からX軸方向(右)に+3進み、そこからY軸方向(奥)に+4進み、さらにそこからZ軸方向(上)に+5進んだ位置を指定したことになります。ちなみに、原点の位置は、計算の途中で勝手に原点の位置を変えるといったことをしなければ、どこに設定しても問題ありません。実験室で計測を行う場合などは、基本的に実験室の中心付近に原点を設定しておきます。

4. 三次元解析と二次元解析
ところで、バイオメカニクス的動作解析研究の標準的手法には、大きく分けて三次元解析と二次元解析の二つが存在します。三次元解析では、三次元空間で行われている身体運動をそのまま三次元的な動きとして記述・分析することが試みられます。それに対して、二次元解析では、三次元空間を形成する三つの座標軸のうち、一つの軸によって表現される情報を考慮しないで(捨象して)身体運動を記述・分析することが試みられます。
分析対象となる身体運動は三次元空間上において生じる現象・出来事であるのだから、常に三次元解析を行えばよく、なぜ二次元解析などというある意味で不自然な研究手法が存在するのか不思議に思われた方もいるかもしれません。この点については、後ほどもう少し詳しく紹介するように、二次元解析には三次元解析と比較して簡便さという観点からメリットがあるため、ときに重宝されてきたという経緯があります。
身体運動を二次元的に捉えることの例として、図6のような歩行動作の表現の仕方を考えてみましょう。

身体運動を二次元的に記述・分析するということは、空間を形成する三つの軸のうち、一つの軸によって表現される情報を、残りの二つの軸によって形成される平面に圧縮してしまうということだと言い換えることもできます。図6のように歩行動作を横からの視点で平面的に捉えたケースにおいては、図7のように、前後の位置を記述するための座標軸と上下の位置を記述するための座標軸によって形成される平面へと、左右方向の空間を圧縮しているということになります。

歩行動作の場合は、図6が歩行動作を表現したものであることが容易に読み取れることからも、空間が左右方向の広がりを持つ(身体が横幅を持つ)という事実を切り捨ててしまっても、部分的とはいえ、歩行動作についての何がしかを記述・表現できていると言えそうです。
しかし、このような記述・表現の仕方では、歩行動作を上からの視点で見たときに存在している骨盤の回旋運動や、前後から見たときに存在していることのある、片脚支持局面において上半身が左右に傾いてしまう不良動作(トレンデンブルグ歩行やデュシャンヌ歩行)などを記述・表現することはできません。このように、やはり二次元解析には、三次元空間で行われている身体運動を歪めて表現することによって、情報の損失を起こしているという側面があることは否定できません。
二次元解析を採用することの一つのメリットとして、身体に貼りつけるマーカーの数を少なくできるということが挙げられます。例えば、全身の三次元解析では、膝や肘の内側と外側にマーカーを貼りつける必要がありますが、二次元解析では、外側のみに貼りつければ良くなります。先ほど、身体に貼りつけられたマーカーの位置をカメラで捕捉するのは、なかなか大変な作業なのだという話をしました。したがって、例えば、使用できるカメラの台数が少ない(=多くのマーカーの位置を捕捉しきるのが難しい)場合などは、二次元解析で事足りるのであれば、二次元解析で済ませてしまいたいという事情が存在するということになります。
以上を踏まえると、三次元解析を行うか二次元解析を行うかは、三次元空間での出来事を二次元平面へと圧縮して(歪めて)表現することによる情報の損失というデメリットと、二次元解析の簡便性というメリットを比較することを通じて選択される(べきだ)と言えるでしょう。上で歩行を例にして少し考察したように、ある動作類型のどのような側面に注目するか次第という側面はあるものの、大まかな傾向としては、歩行やその場での垂直跳びなど、基本的に一つの平面上での動作とみなすことができる動作類型は、比較的二次元解析と相性が良い、つまり空間の三次元性のうち、一つの次元を無視するような考え方をしても、動作の実態を歪めて記述するような害が(まったくないわけではないが)比較的少ないと言えそうです。例えば、垂直跳びを行うときに発揮されている膝を伸展させる力(関節トルク)などは、二次元解析によっても三次元解析によっても大きく異なる値が算出されるわけではありません。それに対して、複雑な三次元的な動きをしている球技における投動作や打動作などは、二次元解析をすることの害が相対的に大きいと言えるでしょう。
三次元解析と二次元解析の違いとして、もう一つ、二次元解析の方が計算式を立てるのが簡単になる(立てる必要のある計算式の数が少なり、かつ一つ一つの計算式も相対的にシンプルなものになる)ということもあります。そのため、二次元解析の手続きの方が三次元解析の手続きよりも簡潔に紹介しやすいです。
また、この連載全体を通して私が展開したい議論との関係でも、三次元解析固有の問題に言及する必要は今のところなさそうだと考えています。つまり、この連載全体の私の議論内容を把握するための補助という観点からは、読者の皆様は二次元解析の手続きが概ねどのようなものなのかということを理解していれば問題ないだろうということです。そのため、三次元解析に固有のトピックに言及する必要がある場合は、適宜その場で必要な事柄について紹介することとし、以下では、二次元解析に絞って、その手続きの概略を紹介させていただこうと思います。
5. 身体を複数の剛体セグメントが連結したものとみなす
前々節では、ある一つの身体部位(これを「セグメント」と呼びます)の両端に取りつけられたマーカーが存在する位置を複数の座標値によって表現することができるというところまでお話ししました。本節から9節では、このセグメントの両端の位置についての情報を使って、次回紹介する、身体動作中に全身の筋が発揮している力(関節トルク)を計算するプロセスの中で必要となる、セグメント端点の位置とは別の情報を算出するという作業について、その概略を紹介したいと思います。
以下では、図8のように、前後(地面と水平)方向をx軸、上下方向をy軸とした座標系を設定し、この平面上に下腿セグメントが存在しているという状況について考えることにします。下腿セグメントの上端と下端には、マーカーが貼りつけられているとします。図8においては、下腿上端のマーカー位置座標は(6,5)、下端のマーカー位置座標は(3,4)というように、その位置を数字の組み合わせによって表現することができます。

このセグメント両端がどの位置に存在しているのかについての情報を基にして、そのセグメントの両端意外の箇所がどこにあるのかを知ることができます。しかし、そのようなことが可能になるためには、対象となるセグメントがある性質を有している必要があります。それは、そのセグメントは「変形しない」という性質です。このような性質を有している物体のことを「剛体」と言います。
マーカーを取りつけた物体が剛体であるならば、剛体の形状についての情報と、二次元平面の場合は二つのマーカー位置についての情報を基にして、剛体全外が平面上に占めている位置を完全に特定することができます。例えば、図9のように、下腿セグメントのマーカーが取りつけられていない箇所であるP1の位置を知りたいとしましょう。上端下端の位置が分かっていれば、後は、「P1は、下端から上端の方向に向かってaという距離だけ進んだ後に、右に90°向きを変えた後にbという距離だけ進んだ位置にある」という知識さえあれば、両端の位置が平面上のどこにあったとしても、必ずP1の位置を特定することができます。

二つのマーカーからのP1の相対的位置は変化しない
反対に、セグメントが剛体であるという条件が満たされていなければ、二つのマーカーの位置情報のみから、セグメント全体の位置的状態を特定することはできません。例えば、マーカーをつけたのが、ヘビの頭と尻尾ならば、両端点の位置を特定できたからといって、ヘビがどのような姿勢をとっているか(空間上のどのような位置を占めているか)を特定できないということが容易に想像できると思います。
ちなみに、剛体が二次元平面上に占める位置を特定するために必要なマーカーの数は二つですが、三次元空間内に占める位置を特定するためには、三つのマーカー位置情報が必要になります。それは、図10のように、仮に二つのマーカー位置が特定されたとしても、三つめのマーカー位置が特定されていないかぎり、複数の位置的状態をとることが可能だから(=一つの位置的状態のみを特定することができないから)です。三次元解析においては、セグメント(関節)の内側と外側にマーカーを貼る必要があるということを話しましたが、それは、このようにセグメント全体の三次元的位置状態を特定するために必要だからなのです。

バイオメカニクス的動作解析における標準的な研究手法においては、人間の身体は複数の剛体セグメントが連結した機構とみなして分析が行われます。身体の変形を考慮した手法を用いた研究も存在しますが、そうした手法を用いるには、非常に煩雑な作業が必要になります。セグメントを剛体とみなすことができれば、ごく少数の(とはいえ、既に述べたようにそれなりの数にはなりますが)マーカーをセグメントに取りつけることによって、時々刻々においてセグメント全体が占める位置の全貌をつかむことができますが、セグメントが変形してしまう場合にはそうはいかなくなります。
このように、一つ一つのセグメントを剛体とみなすことができるということは、身体が空間や平面内においてどのようにふるまっているのかを安定して把握する上で非常に重要な前提条件となるのです。これが、バイオメカニクス的動作解析研究においては、個々のセグメントを剛体とみなす分析手法が広く普及している一方で、セグメントの変形を考慮するような手法の整備は相対的に立ち遅れている背景事情なのではないかと思います。
身体を複数の剛体セグメントが連結したものとして考えるのは、例えば、大腿部と下腿部をまとめて一つの剛体として考えるというようなことをしてしまうと、さすがにあまりにも実態からかけ離れた運動の記述になってしまうからです。そのため、概ね変形せずに一体となって動いていると考えても良さそうな所で、身体を分節化して捉えるということをすることになります。
もっとも、例えば何百とある全身の骨ごとにセグメントを分節化するというようなことは、膨大な数のマーカーを身体に貼りつけることが必要になってしまうため非現実的です。そのため、例えば体幹部などは、脊椎の一つ一つごとに個別のセグメントとして考えるのではなく、二つ(脊椎部+骨盤部)あるいは三つの剛体セグメント(胸椎部+腰椎部+骨盤部)が組み合わさったものとみなして分析を行うのが通常です。他にも、足部なども、多数の骨の組み合わせによって構成されており、厳密に考えるならば複雑に変形するわけですが、ごく一部の足部の細かな挙動を専門に研究する人たち以外は、一つの剛体とみなすか、せいぜいが二つの剛体が組み合わさったものとみなして分析を行っています。
ここから先は
¥ 250
この記事が気に入ったらチップで応援してみませんか?