
超簡単!現場で使える【BUS】入門

【BUS】=>多くのデバイスに接続するデータ経路
現代の自動車を動かすために欠かせない【BUS】(多くのデバイスに接続するデータ経路)ですが、多くのメカニックが苦手にしているシステムの1つでもあります。
私が今までに見てきた、メカニックが苦手、もしくは理解できないものトップ3は、電気、A/T、CANです。
そんな、【CAN】ですが、全てを理解しなくても、「これだけ押さえておけば、難しいことはない」というお話です。
電気もCANも、共通しているのは、目に見えないことで、これがメカニックが理解できない最大の要素と思われます。
今回は、そんな難解と思われている【BUS】の、「ここを抑えておけば怖くない」要点を解説していきます。
そうです、全てを覚える必要はないのです。
【BUS】はなぜ開発されたのか?
自動車は発明されたころは、地球上の全ての理屈を利用して動いていました。
エンジンを始動させるときも、現代のようなセルモーターなどなく、人力で、エンジンのクランクシャフトを回していました。
パワーステアリングなどもなく、屋根もないからヒーターのない、窓ガラスもないからワイパーもない、ヘッドライトもウインカーもありませんでした。
ただ唯一、電気が使われていたのは、シリンダー内のガソリンを燃焼させるために火花を生成させるのに電気が使われていました。
1897年の話です。その後、ヘッドライトや発電機を搭載するようになっていきます。
マイクロコントローラーが初めて自動車に採用されたのは1970年代に入ってからです。
このころから、排気ガスの規制が始まります。
排気ガスを制御するために、マイクロコントローラーを利用して、点火タイミングと燃料の噴射量を最適化させました。
この頃から、制御の精密さと、安全面や環境問題に関連した法規制ができ始め、機械的な制御から、エレクトロニクス制御へと移行していきました。
これによって、エンジンの点火タイミングなどを最適化することで「地球環境にやさしい」自動車に変化してきました。
エンジン制御は、点火時期をコントロールするために、クランク角度を基準に制御しています。
また、カムの動きやタイミング、形状による混合気の吸入量や排気のタイミングを精密に制御しています。
メーカーによっては、カムシャフトを無くして、すべてをマイコン制御し、機械式のカムシャフトで制御するよりも、より精密に作動させることで、燃費向上やCO²削減を図っているのです。
もう一つ問題は、車両の重さです。
基本的に市販の自動車は、レーシングカーの様に強化プラスチックを使って軽量化は、コストの面でも難しいところですが、それを実現させる時代の流れがあります。
そこで、機械的制御から電子的制御へ転換し、自動車重量の削減を目的とした【X-by-wire】なるアプリケーションが開発されました。
代表的に使われていた例としては、【Steer-by-wire】【Break-by-wire】【Suspention-by-wire】がありました。
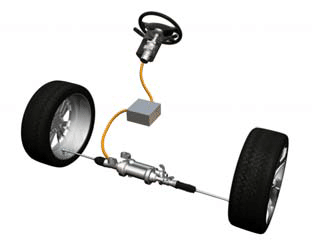
【Steer-by-wire】を簡単に解説すると、一般的なパワーステアリングは、ハンドルとステアリングギアボックスをコラムシャフトを介して操作していますが、【Steer-by-wire】ではコラムシャフトは介さずに、ハンドルの回転信号をコントロールユニットが検知して、ステアリングギアボックスをモーターで作動させるというものです。
1970年代にエンジン制御のために採用されたマイクロコントローラーですが、現代ではABSやESPなど安全制御システムにも利用され、自動車の高機能化で数多くのECU(電子制御ユニット)を搭載しています。
ECUの増加に伴って、ワイヤーハーネスの種類と量が増加し、それに伴って車体重量のうち5~10%がワイヤーハーネスとも言われています。
EUUはマイクロコントローラー導入初期に、1つのECUで数個のバルブやモーターを制御していましたが、マイクロコントローラーの性能向上や価格の低下などで、1つのECUで制御する対象が増加しました。
この影響で、ワイヤーハーネスの種類や本数を増加させました。
車両によって違いますが、1台につき10~60個のECUが搭載されていて、集中制御方式と呼ばれていました。
増加したワイヤーハーネスの問題解決のための策の1つが、「分散制御方式」です。
この「分散制御方式」には、以下のことが求められました。
・自動車の信頼性、賢ろう性、柔軟性の向上につながること
・劣悪な環境でも確実に通信できること
・自動車内のネットワークとその通信プロトコルが標準化されること
車載ネットワークプロトコルの1つである【CAN】コントロールエリアネットワークは、1980年代にボッシュ社によって提唱され、「ISO11898」として標準化されました。
最初はヨーロッパの代表的なメーカーが使い始め、続いて数多くのヨーロッパのメーカーが採用し、アメリカや日本のメーカーも採用しました。
1998年10月に、ヨーロッパの自動車メーカー(アウディ、BMW、ダイムラークライスラー、VW、ボルボ)が参加した共同事業体が【LIN】ローカルインターコネクトネットワークプロトコルは提唱されました。
【LIN】は【CAN】のサブバスで「CANのユニットよりも安価に攻勢ができる」というコンセプトで製作されました。
2000年には、【CAN】の上位にある「FlexRayプロトコル」を【LIN】の共同事業体にアメリカのGM社を加えたFlexRay共同事業体によって提唱されました。
【CAN】は、自動車に搭載されているECUの数が増加したことにより、ECU同士を結ぶためのネットワークとして利用されていて、1986年2月にボッシュ社から提案されました。
ボッシュ社は、1983年から開発をスタートさせ開発の段階から、メルセデスベンツの技術者も参加していたようです。
1987年には、最初の【CAN】コントローラーチップがアメリカのインテル社とオランダのフィリップスセミコンダクターズ社から発売されました。
これらは、現在の【CAN】コントローラとは全く異なる方法をとっていました。
ボッシュ社が1991年に、現在の仕様である【CANプロトコル2.0】を発表。1993年11月に「ISO11898」として公開され、伝送速度は1.0Mbpsと定義されました。
1995年には、さらに改正された「ISO11898」が拡張されて、29ビットのIDを持つ【CAN】が登場しました。
1992年からメルセデスベンツに【CAN】を搭載した車両が市場に投入されました。
まずはエンジン系統の制御を行い、次の段階でボディ系統のシステムに搭載され、その後、この2つのシステムは、ゲートウェイで接続されるようになり、これ以降、ヨーロッパの自動車メーカーで採用されていきました。
ここまでが豆知識的な【BUS】の生い立ちでした。
ここからが本題です。
まずは【CAN BUS】の種類と見分け方から解説していきます。
AI音声付きはこちらにあります

あなたのサポートがネタ集めの励みになります。