
久々 Kerbal Space Program 日誌 15.1 再使用探査機

[ ゲーム内同時期 ]
機材:MMRFP-2 無人探査機
Mun Minmus Refillable Flyby Probe 2
(ムン・ミンマス 再充填可能フライバイ探査機)

1回のフライバイでMunとMinmusどちらかの低高度・高高度で科学調査を行い、Kerbin軌道上の移動実験室まで回収。機器のレストアと燃料補給を行うことで、1ステーションあたり2天体で同様のミッションをこなせることを目的とした探査機です。
前回のセーブデータでは「1往復したらHECSが開放できてお役御免」になったのでプローブコアは最初からHECSを採用しています。
ミッション
1年90日:MMRFP-2 Munフライバイ
1年90日 04:40頃 打ち上げ

T+ 00:05頃 140.5×100.3 kmの軌道に到達。2段目残ΔV133m/s

T+ 00:24頃 遠点で加速。141×139km。2段目残ΔV103m/s
T+ 00:28頃 軌道傾斜角を調整。2段目残ΔV100m/s
T+ 00:30頃 2段目を投棄。
マニューバを検討。
Mun最接近50km、3日後にKerbin遠点1万5000km近く、Kerbin近点5日後1700km程度。
T+ 01:15頃 噴射実施。
1日2時間後にKerbinの遠点12,117kmを通過後、Mun最接近50km、Munスイングバイで再度外側に放り出され、2日5時間後に2回目のKerbin遠点14,887km。4日5時間後にKerbin近点1655km予定。

T+ 04:37頃 Mun圏に到達し、温度計測・気圧計測・Goo観察・マテリアル観察を実施。
マニューバ作成、一旦Kerbin近点600kmに設定。
T+ 3日01:29頃 噴射実施、Kerbin近点597km。軌道傾斜角調整のマニューバ作成。

T+ 5日00:06頃 噴射実施、さらに1分後に軌道傾斜角調整。600×596.8 kmでKO-Lab1ステーションへのランデブーに向けた待機軌道に。

T+ 5日00:24頃 噴射実施。交差点1で0.4kmまで接近。


1年95日 05:38頃 ドッキング完了。
ステーションのストレージに科学データを移し、燃料を充填。

1年96日:MMRFP-2 Minmusフライバイ出発

96日 04:37頃 ステーションから分離
96日 04:50頃 軌道傾斜角を調整完了。341×320km、残ΔV2085m/s。
マニューバ検討。11日後にMinmus 25km、Kerbin近点は18日後に5,160kmになる想定。
96日 05:32頃 噴射実施。
11日4時間後にMinmus最接近24km

1年106日現在 Minmusへ向けて飛行中。
1年108日 03:38頃 高高度での科学データ収集実施。
1年108日 03:45頃 低高度での科学データ収集実施。
1年109日 00:24頃 Minmus圏を離脱。

1年109日 00:35頃 遠いうちに軌道傾斜角をある程度調整、3.6度に。
追加のマニューバを作成、5日2時間後に24秒噴射して軌道傾斜角0度に。

1年114日 03:24頃 噴射実施。軌道傾斜角を0度に調整。
マニューバ作成、近点を600km程度まで下げる。
1年114日 00:07頃 4分ほど噴射して近点600kmに。
1年115日 03:18頃 推力制限の戻し忘れでTWRが0.2程度しかなかったことに気づいて、推力を上げて噴射。570km程度の軌道へ。
残ΔV 131m/s、ステーションへのランデブーに向けた減速に必要ΔV110m/sで相対速度124m/s。単独でのサイエンス収集運用としては失敗に。
救援プラン
燃料不足で単独でのサイエンス持ち込みには失敗。
A:燃料補給を行って自力でステーションに回航する。
B:データを抜き取って放棄、ステーションにデータだけを輸送する。
A-1案:Mun軌道用の有緑救難機を打ち上げて補給。
A-2案:Mun探査司令船の同型機を打ち上げて補給。
A-3案:ステーションに係留中のKOTU-181j補給機1号の残燃料を使って補給。
1年116日:臨時回収ミッション
ステーションに係留中のKOTU-181j補給機1号を分離、逆にMMRFPを回収に向かいます。

1年116日 00:27頃 噴射実施 交差1で2.4km
1年116日 00:31頃 微調整し、交差1での距離が0.9km予定に。

1年116日 00:55頃 距離1km付近、逆行マーカーがターゲット逆方向に近づくように噴射、最接近が0.1kmに。
1年116日 00:55:40頃、距離89mで一旦相対速度0に到達。

RCSを主に使い接近を開始。
1年116日 00:57頃、距離20mで一旦停止。

1年116日 00:58頃、ドッキング完了。

MMRFP側のエンジンをシャットダウン。補給機ごとランデブー予定。
1年116日 01:00頃 マニューバ作成。2時間後に噴射し、0.5kmに接近する予定。ドッキングの都合か残ΔVは正常に計算できない状態。
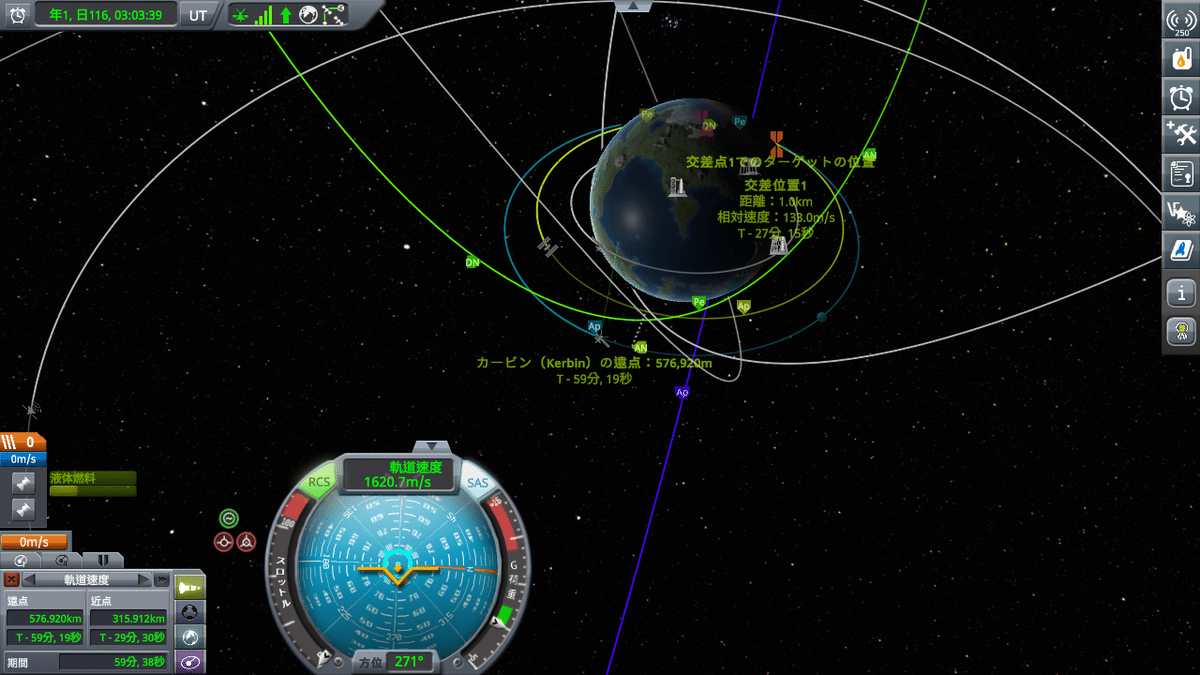
1年116日 03:03頃 マニューバ噴射実施後、微調整して最接近1.0km予定。
1年116日 03:30頃 最接近まで数km手前で方向を調整。最接近0.1km予定に。
1年116日 03:32頃 距離10mほどで一旦静止。
補給機のメインタンクの燃料をすべてMMFRPに充填。
1年116日 03:34頃 補給機とのドッキングを解除、補給機を落下コースへ。


1年116日 03:34頃 ステーションへのドッキング成功。
Minmusで取得したサイエンスを研究室に移し、変換速度は9ポイント/日まで増加しました。
MMRFP-2は燃料を補給して、そのうち通信中継衛星として使います。
