プログラミングで運転!? 【bCoreレーサーミニ四駆】

こんにちは!
PLEN Projectの松原です。
突然ですが、ミニ四駆はご存知でしょうか?
ミニ四駆とは、モーターを搭載したカーレーシング用のホビーで、プラモデルや工作キットで有名な、株式会社タミヤが発売しています。
ミニ四駆はラジコンではないため、前にしか進むことができないのですが、bCore基盤を搭載することで、ラジコンに改造することができます。

今回は、このbCoreレーサーの操縦方法と、プログラミングを用いた操縦方法についてご紹介します。
bCoreレーサーに興味のある方は、是非ホームページをご確認ください!
1. bCoreレーサーの操縦方法
まず、bCoreレーサーと操縦するデバイス(スマートフォンやPC)をご用意ください。
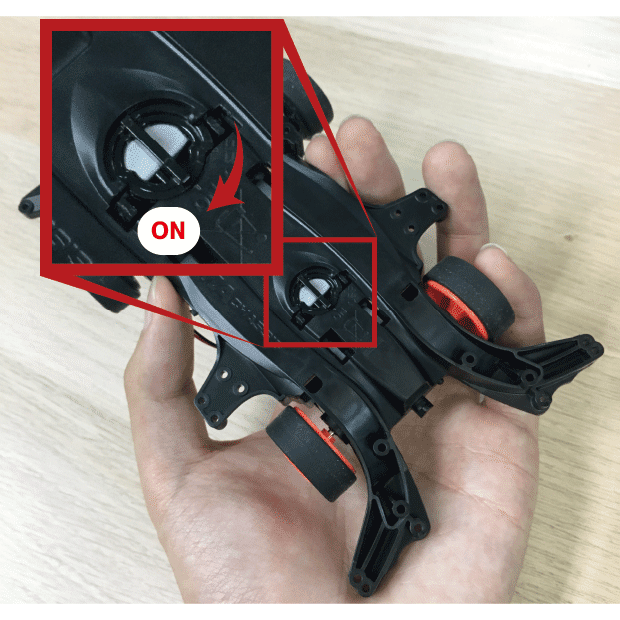
bCoreレーサーの電源をONにします。
bCoreを操縦するためのウェブアプリ「bDriverMX for WebApp」にアクセスします。
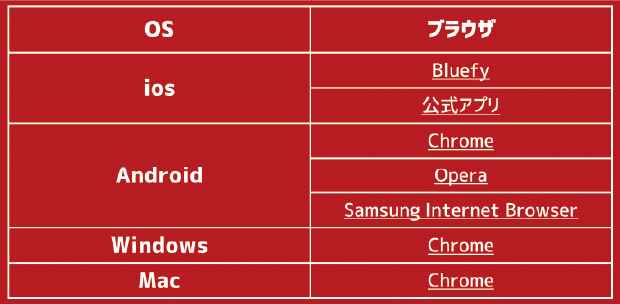
ウェブアプリは以下のブラウザに対応しております
ご利用の際はBluetoothと位置情報が必要となります
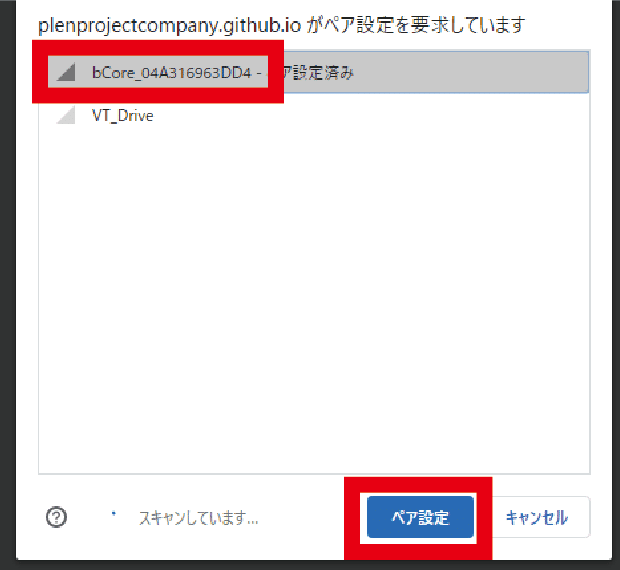
スタートボタンを押し、

bCoreと接続します。
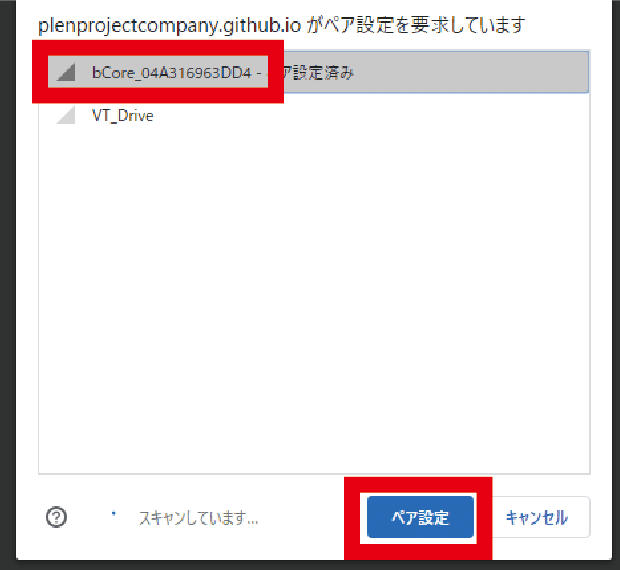
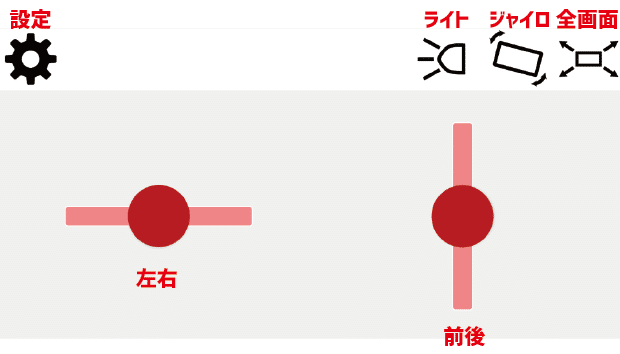
接続が完了すれば、自由に操縦することができます。
初回アクセス以降はオフラインでもご利用可能です
ジャイロはAndroidのみ対応しています
PCではキーボードで操縦できます
2. bCoreレーサーのプログラミング方法
プログラミングを用いると、コントローラーでは実現できない繊細な操縦が可能となります!
ウェブアプリを再読み込みし、タイトル画面に戻ります。

プログラミングモードに切り替えます

以下から直接アクセスできます
スタートボタンを押し、

bCoreと接続します。
コントローラーが、プログラミング版に変わりました。
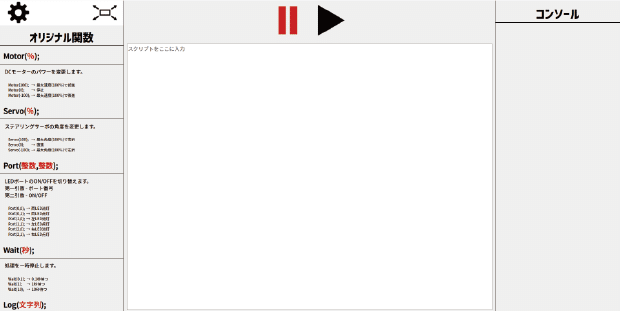
構成は大きく分けると以下のようになります。
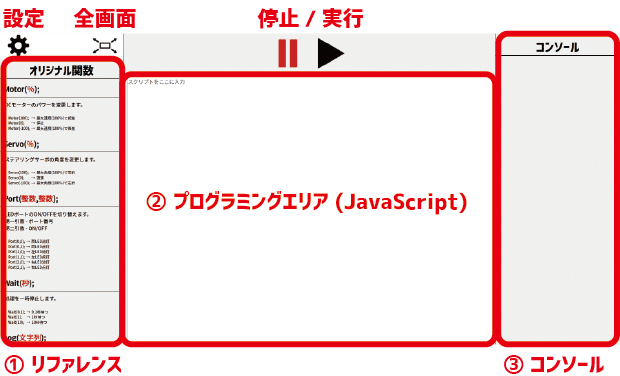
① リファレンス
bCoreレーサーを動かすための関数やJavaScriptの基本的な関数についてご紹介しています。
② プログラミングエリア
JavaScriptでプログラミングを行ってください。再生ボタンを押すと、プログラムが実行されます。
③ コンソール
プログラムの実行状況や、エラーについて把握できます。
例えば、以下のようなプログラムを実行すると、bCoreレーサーが最大速度で1秒間進みます。
(最大速度は設定から変更可能です)
Motor(100);
Wait(1);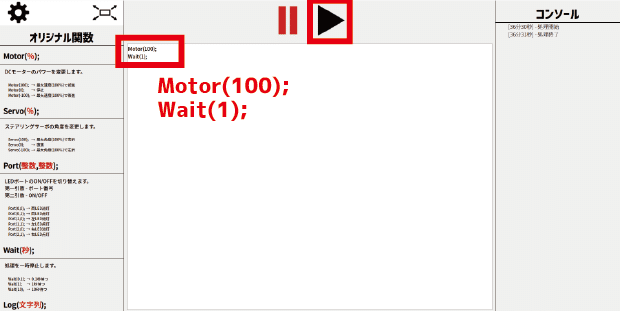

自由にプログラミングしてみましょう!
Let's coding!
3. プログラム例
いくつかサンプルプログラムを作成しましたので、参考にしていただければ幸いです。
最大速度80%, 最大角度80% で作成しております
プログラム例1
『路肩駐車』
道路の左肩に駐車し、ライトを4回点滅させます。
//左に曲がる
Servo(-100);
Motor(20);
Wait(0.7);
//右に曲がる
Servo(100);
Motor(20);
Wait(0.5);
//真っ直ぐ進む
Servo(0);
Wait(0.3);
//停止する
Motor(0);
Wait(0.3);
//ライトを4回点滅させる
for(var i =0;i<4;i++){
Port(0,1);
Wait(0.2);
Port(0,0);
Wait(0.2);
}
プログラム例2
『時間指定』
指定時刻になればランダムに走り出します。
//動き出す時刻を設定
var 設定時 = 18;
var 設定分 = 36;
var 設定秒 = 0;
//時刻計算
var MoveTime = 設定時 * 60 ** 2 + 設定分 * 60 + 設定秒;
//現在時刻の取得
var date = new Date();
var NowTime = date.getHours() * 60 ** 2 + date.getMinutes() * 60 + date.getSeconds();
//設定時刻まで待つ
Log("設定時刻 :" + MoveTime)
while(MoveTime != NowTime){
//現在時刻の取得
date = new Date();
NowTime = date.getHours() * 60 ** 2 + date.getMinutes() * 60 + date.getSeconds();
Log("現在時刻 :" + NowTime);
Wait(1);
}
Log("設定時刻になりました");
//ランダムに動く
for(var i = 0;i<10;i++){
Motor(Random(-100,100));
Servo(Random(-100,100));
Port(Random(0,2),Random(0,1));
Wait(Random(0,3));
}(18時36分に設定した場合)

4. 終わりに
bCoreレーサーのプログラミングは楽しんで頂けたでしょうか?
色々試してみてくださいね(*^^)v
ご意見・ご質問等ございましたら、
ご気軽にコメント欄まで頂ければありがたいです。
それでは、また別の記事でお会いしましょう!
See you next time!