
Petoi Bittle 入門 (1) - 事始め

「Petoi Bittle」が届いたので、試運転してみました。
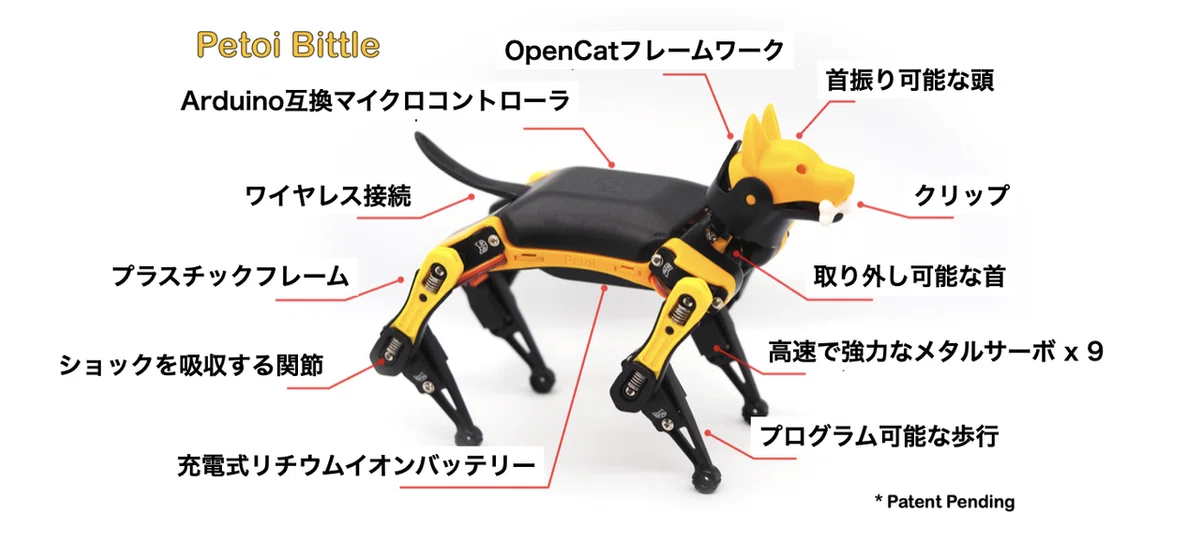
1. Petoi Bittle
「Petoi Bittle」は、自分で組み立て・カスタマイズ。犬型ロボットです。制御は、Arduinoベースのカスタマイズボード「NyBoard V1」を使用しています。
「Petoi Bittle」の特徴は、次のとおりです。
マニュアルは、以下にあります。
2. NyBoard V1
「NyBoard V1」は、「Raspberry Pi」が搭載できるように、2×5ピンのソケットを備えており、「Pi Zero」や「Pi 3A+」を搭載し、シリアルまたはI2Cで接続できます。オプションでAIカメラ、ジェスチャーセンサー、赤外線センサー、ライトセンサーなど各種モジュールを用意しています。

マニュアルは、以下にあります。
3. 箱を開く → 試運転
箱を開くと、組み立て済みの「Petoi Bittle」がでてきます。

首とお腹のバッテリーは置いてあるだけで接続されてないので、接続して、しっぽも付けて、膝を自然な角度に曲げて立たせます。
この時、付属のシリコン製のつま先は付けないでください。これらは、摩擦が重要な役割を果たす表面の研究用に用意されています。

お腹のバッテリーのボタンを2〜3秒間長押しすることで、電源オン/オフできるとあるので、電源をオン。 附属の赤外線リモコンで、適当に操作してみます。最上段中央のボタンを押すと、たどたどしいながら歩きはじめました。

たどたどしい動きは少し心配したけど、マニュアル見たら、以下のように書いてあって一安心。
組み立て済みのBittleは粗く調整されているだけです。 Bittleのセンサーを調整し、最高のパフォーマンスを得るために関節の微調整が必要です。これを行うには、Arduino IDEをセットアップする必要があります。