D-Robotics RDK X3 入門 (2) - ハードウェアの概要

「RDK X3」のハードウェアの概要についてまとめました。
前回
1. RDK X3 のインタフェース
RDK X3 は、イーサネット ポート、USB、カメラ、LCD、HDMI、40PIN などのインターフェイスを提供し、画像マルチメディアやディープラーニング アルゴリズムの開発とテストを容易にします。開発ボードのインターフェイス レイアウトは次のとおりです。
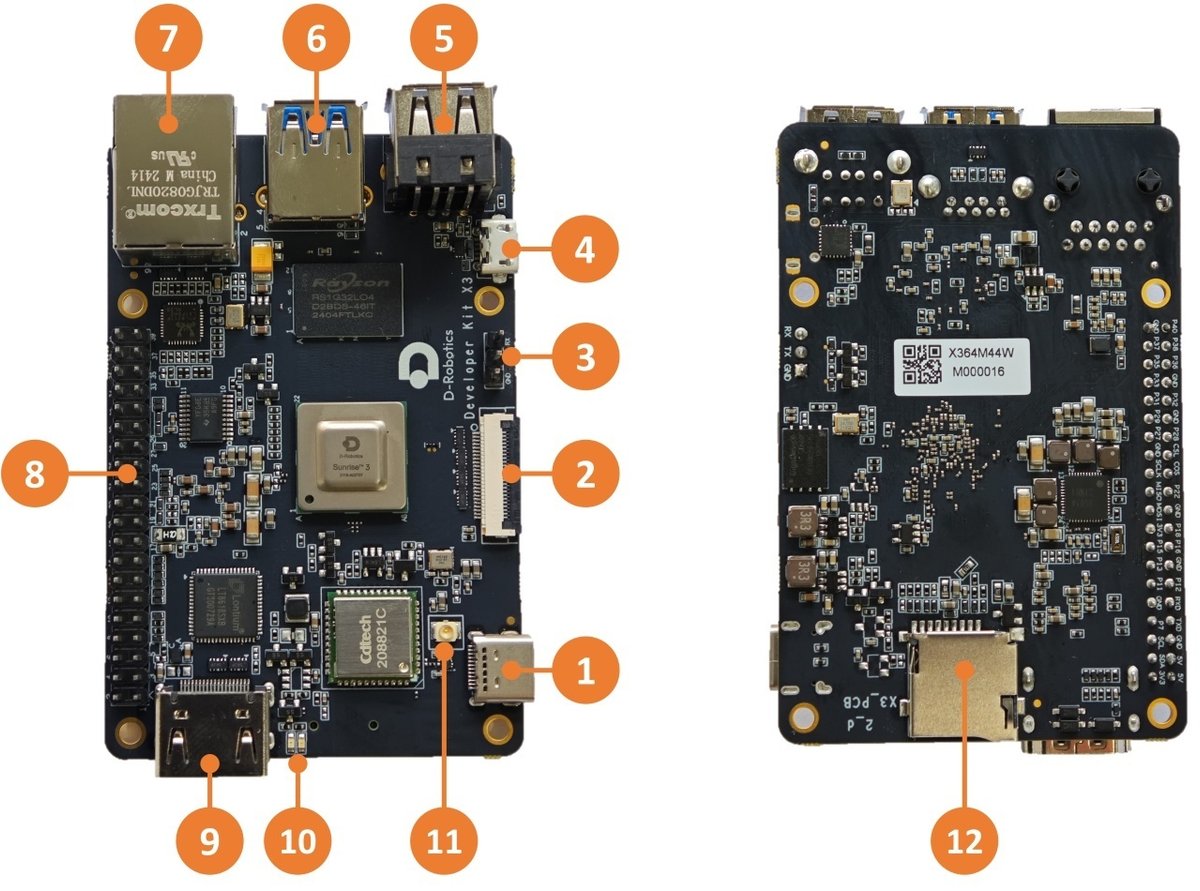
(1) USB Type C パワーインターフェース
(2) MIPI CSI カメラインターフェース
(3) デバッグシリアルポート
(4) Micro USB 2.0 インターフェース
(5) USB 2.0 Type A インターフェース x 2
(6) USB 3.0 Type A インターフェース
(7) ギガビットイーサネットポート
(8) 40PIN インターフェース
(9) HDMI インターフェース
(10) 電源 および ステータスLEDインジケーター
(11) Wi-Fiアンテナインターフェース
(12) Micro SD カードインタフェース
2. 電源インタフェース
開発ボードには、電源インターフェイスとして1つの USB Type C インターフェイス (インターフェイス1) が用意されており、開発ボードに電力を供給するには 5V/3A をサポートする電源アダプタを使用する必要があります。電源アダプタを開発ボードに接続すると、開発ボードの赤い電源インジケータ ライトが点灯し、開発ボードに適切な電源が供給されていることを示します。
【注意】開発ボードに電源を供給するためにコンピュータのUSBインターフェイスを使用しないでください。電源が不足し、異常な電源障害が発生し、開発ボードが繰り返し再起動する可能性があります。
秋月電子の「スイッチングACアダプター(USB ACアダプター) Type-Cオス 5.1V3.8A」で問題なく動いています。
3. デバッグシリアルポート
開発ボードには、シリアル ポートログインおよびデバッグ機能用のデバッグシリアルポート (インターフェイス3) が 1 つ用意されています。
・Baud rate: 921600
・Data bits: 8
・Parity: None
・Stop bits: 1
・Flow Control: None
「UART」を接続するときは、DuPont wireを開発ボードのインターフェイス3 に接続し、USBシリアルアダプタをコンピュータに接続する必要があります。接続が完了すると、次図のようになります。

4. ギガビットイーサネットポート
開発ボードには、「1000BASE-T」「100BASE-T」をサポートする1つのギガビットイーサネットポート (インターフェイス 7) が用意されています。デフォルトでは、IPアドレス 192.168.1.10 の静的 IP モードになっています。開発ボードのIPアドレスを確認するには、シリアルポート経由でデバイスにログインし、ifconfig コマンドを使用して eth0 インターフェイスの構成を表示します。
sunrise@ubuntu:/# ifconfig
eth0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 192.168.1.10 netmask 255.255.255.0 broadcast 192.168.1.255
inet6 fe80::211:22ff:fe6f:de17 prefixlen 64 scopeid 0x20<link>
ether 00:11:22:6f:de:17 txqueuelen 1000 (Ethernet)
RX packets 112 bytes 7327 (7.3 KB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 197 bytes 8678 (8.6 KB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 39 base 0xc000 イーサネットケーブルを開発ボードに挿入した後にシステムに次の出力が表示される場合、イーサネット接続は正常であることを示します。
[13293.952661] st_gmac a5014000.ethernet eth0: Link is Down
[13295.062996] st_gmac a5014000.ethernet: Link is Up - 1000/Full
[13296.000750] st_gmac a5014000.ethernet eth0: Link is Up - 1Gbps/Full - flow control rx/tx5. HDMI インタフェース
開発ボードには、最大解像度 1080P をサポートする 1 つの HDMI ディスプレイインターフェイス (インターフェイス9) が用意されています。開発ボードは、HDMI インターフェイスを介してモニターに Ubuntu システムデスクトップ (ロゴアイコンを表示する Ubuntu Server バージョン) を出力します。さらに、HDMI インターフェイスは、カメラやネットワーク ストリーム画像のリアルタイム表示をサポートします。
現在 HDMI インターフェイスでサポートされているディスプレイ解像度は次のとおりです。
・1920x1080
・1280x720
・1024x600
・800x480
6. USB インタフェース
6-1. USB インタフェース
X3チップはUSBインターフェイスを1つしか提供しないため、開発ボードはハードウェア回路を通じて複数のUSBインターフェイス拡張を実装し、複数のUSBデバイス接続のニーズに対応します。
・Micro USB2.0 (インターフェース4) x 1
USB デバイス モード。ADB、Fastboot、UVCなどの機能を実装するためにホストに接続するために使用。
・USB 2.0 タType A (インターフェース5) x 2
USBホストモード、USB 2.0周辺機器の接続に使用。
・USB 3.0 Type A (インターフェース6) x 1
USBホストモード、USB 3.0周辺機器の接続に使用。
USBホストとデバイスのモード切り替えは、ハードウェア回路によって完全に実装されています。ユーザーは、上記の表のロジックに従ってデバイスを接続するだけです。
開発ボードの USBホスト機能とデバイス機能は相互に排他的です。デバイスがデバイスインターフェイスに接続されると、ホストインターフェイスは自動的に非アクティブになります。
6-2. USB Flash Drive の使用
開発ボードの USB Type A インターフェイス (インターフェイス 5 および 6) は、USB Flash Drive をサポートしています。USB Flash Driveを自動的に検出してマウントできます。デフォルトのマウントディレクトリは /media/sda1 です。ユーザーは、次に示すように、touch コマンドを使用して、USB フラッシュ ドライブが正常に動作していることを確認できます。
sunrise@ubuntu:/media/sda1$ sudo touch test
[sudo] password for sunrise:
sunrise@ubuntu:/media/sda1$ ls -l test
-rwxr-xr-x 1 root root 0 Apr 30 21:19 test
sunrise@ubuntu:/media/sda1$6-3. USB Serial Port Adapter
開発ボードの USB Type A インターフェイス (インターフェイス 5 および 6) は、USB Serial Port Adapterをサポートしています。USB Serial Port Adapterを自動的に検出し、デバイスノード /dev/ttyUSB* または /dev/ttyACM* (アスタリスクは 0 から始まる数字を表します) を作成できます。シリアルポートの使用方法については、UARTの使い方を参照してください。
7. USB カメラ
開発ボードの USB Type A インターフェイスは USB カメラ機能をサポートしており、USB カメラの接続を自動的に検出してデバイスノード /dev/video8 を作成できます。ユーザーは、次に示すように、v4l2 コマンドを使用して USB カメラが正常に動作しているかどうかを確認できます。
sunrise@ubuntu:/media/sda1$ sudo v4l2-ctl -d /dev/video8 --all
Driver Info:
Driver name : uvcvideo
Card type : FHD Camera: FHD Camera
Bus info : usb-xhci-hcd.0.auto-1.2
Driver version : 4.14.87
Capabilities : 0x84200001
Video Capture
Streaming
Extended Pix Format
Device Capabilities
Device Caps : 0x04200001
Video Capture
Streaming
Extended Pix Format
Media Driver Info:
```Driver name: uvcvideo
Model: FHD Camera: FHD Camera
Serial: 12345
Bus info: 1.2
Media version: 4.14.87
Hardware revision: 0x00000020 (32)
Driver version: 4.14.87
Interface Info:
ID: 0x03000002
Type: V4L Video
Entity Info:
ID: 0x00000001 (1)
Name: FHD Camera: FHD Camera
Function: V4L2 I/O
Pad 0x01000004: Sink
Link 0x0200000a: from remote pad 0x1000007 of entity 'Processing 2': Data, Enabled, Immutable
Priority: 2
Video input: 0 (Camera 1: ok)
Format Video Capture:
Width/Height: 1920/1080
Pixel Format: 'MJPG' (Motion-JPEG)
Field: None
Bytes per Line: 0
Size Image: 4147200
Colorspace: Default
Transfer Function: Default (maps to Rec. 709)
YCbCr/HSV Encoding: Default (maps to ITU-R 601)
Quantization: Default (maps to Full Range)
Flags:
Crop Capability Video Capture:
Bounds: Left 0, Top 0, Width 1920, Height 1080
Default: Left 0, Top 0, Width 1920, Height 1080
Pixel Aspect: 1/1
Selection Video Capture: crop_default, Left 0, Top 0, Width 1920, Height 1080, Flags:
Selection Video Capture: crop_bounds, Left 0, Top 0, Width 1920, Height 1080, Flags:
Streaming Parameters Video Capture:
Capabilities: timeperframe
Frames per second: 30.000 (30/1)
Read buffers: 07. MIPI CSI
開発ボードには1つの MIPI CSI インターフェイス (インターフェイス 2) が用意されており、MIPI カメラの接続が可能です。現在、開発ボードは複数の仕様のカメラモジュールと互換性があります。モジュールモデルと仕様は次のとおりです。

カメラ モジュールはFPCケーブルを介して開発ボードに接続されます。コネクタに挿入するときは、ケーブルの青い面が上を向くように注意してください。

インストール後、ユーザーは i2cdetect コマンドを使用して、モジュールの I2Cアドレスが正しく検出できるかどうかを確認できます。検出できない場合は、FPC ケーブルの接続が正しいかどうかを確認する必要があります。I2C アドレスが正常に検出されると、ログには次のように出力されます。
# First, enable the 24MHz master clock for the sensor
sunrise@ubuntu:~# sudo bash -c "echo 1 > /sys/class/vps/mipi_host0/param/snrclk_en"
sunrise@ubuntu:~# sudo bash -c "echo 24000000 > /sys/class/vps/mipi_host0/param/snrclk_freq"
# Execute the i2cdetect command, and the displayed 40 is the I2C device address of the JXF37 sensor, indicating that the camera is connected correctly
sunrise@ubuntu:~# sudo i2cdetect -y -r 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- UU -- -- -- --
40: 40 -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- -- 【注意】 開発ボードの電源が入っているときにカメラを接続したり取り外したりすることは、カメラモジュールを損傷する可能性があるため、固く禁じられています。
8. Micro SD カードインタフェース
開発ボードには、1つの Micro SD カードインターフェイス (インターフェイス 12) が用意されています。Ubuntu と関連パッケージのインストール要件を満たすには、少なくとも 8GB の容量を持つストレージが必要です。
【注意】 開発ボードの使用中は、ストレージ カードのホットプラグは禁止されています。システム異常の原因になったり、ストレージカードのファイルシステムが損傷したりする恐れがあります。
9. Wi-Fi アンテナインタフェース
開発ボードは、ワイヤレスネットワーク用のオンボード アンテナと外部アンテナの両方をサポートしています。ほとんどの場合、オンボード アンテナでユーザーのニーズを満たすことができます。ただし、開発ボードに金属ケースを取り付ける場合は、信号強度を高めるために外部アンテナをインターフェイス 11 に接続する必要があります。
【ヒント】オンボードアンテナを外部アンテナに変換するには、コマンド「sed -i 's/trace/cable/g' /etc/init.d/hobot-wifi」を使用します。変更を有効にするには、システムを再起動します。
オンボード アンテナに戻すには、コマンド「sed -i 's/cable/trace/g' /etc/init.d/hobot-wifi」を使用します。変更を有効にするには、システムを再起動します。
10. 40PIN インタフェース
RDK X3 開発ボードは、3.3V ロジック レベル設計を使用した IO 信号を備えた 40PIN インターフェイスを提供します。PIN定義は、「Raspberry Pi」などの製品と互換性があります。詳細なピン定義とマルチプレックス関係は次のとおりです。

開発ボードには 40PIN インターフェースのシルクスクリーンマーキングがあり、ユーザーの操作に便利です。PIN1 と PIN40 の位置は次のとおりです。

40PIN インターフェースの各機能の使用方法については、「40PINの使用方法」を参照してください。