ROS2 Jazzy 入門 (2) - ロボット操作

「SDF」で作ったシンプルな差動二輪ロボットを「Gazebo Harmonic」で表示して「teleop_twist_keyboard」で操作します。
・Ubuntu 24.04
・ROS2 Jazzy
・Gazebo Harmonic
前回
1. ROS2 Jazzy と Gazebo Harmonic の準備
「Ubuntu 24.04」に「ROS2 Jazzy」と「Gazebo Harmonic」をインストールします。
2. teleop_twist_keyboard の準備
「teleop_twist_keyboard」は、ROS2でロボットの移動をキーボード操作するためのツールです。主に、ロボットの基本的な動作をテストする場面で使用します。キーボード入力に応じて、ロボットの速度命令を geometry_msgs/Twist 形式で発行します。他のノードが購読できるトピック (通常は/cmd_vel) にデータを送信します。
(1) パッケージのインストール。
$ sudo apt update
$ sudo apt install ros-jazzy-teleop-twist-keyboard(2) ターミナルを開いて「teleop_twist_keyboard」を実行。
キーボード入力を受け取り、geometry_msgs/Twist メッセージをpublishする「teleop_twist_keyboard」ノードを起動します。
$ ros2 run teleop_twist_keyboard teleop_twist_keyboardThis node takes keypresses from the keyboard and publishes them
as Twist/TwistStamped messages. It works best with a US keyboard layout.
---------------------------
Moving around:
u i o
j k l
m , .
For Holonomic mode (strafing), hold down the shift key:
---------------------------
U I O
J K L
M < >
t : up (+z)
b : down (-z)
anything else : stop
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%このノードはキーボードからキー入力を受け取り、それを Twist/TwistStamped メッセージとして発行します。US キーボードレイアウトで最適に機能します。
---------------------------
移動:
u i o
j k l
m , .
Holonomicモード (横移動) の場合は、Shift キーを押したままにします:
---------------------------
U I O
J K L
M < >
t: 上 (+z)
b: 下 (-z)
その他: 停止
q/z: 最大速度を 10% 増加/減少
w/x: 直線速度のみを 10% 増加/減少
e/c: 角速度のみを 10% 増加/減少
(3) 別のターミナルを開いて「ros2 topic echo」を実行。
/cmd_velトピックにpublishされたメッセージをリアルタイム出力します。
$ ros2 topic echo /cmd_vellinear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
:
geometry_msgs/Twist のデータ型は次のとおりです。
・geometry_msgs/Twist
・geometry_msgs/Vector3 linear : 直線速度 (m/s)
・geometry_msgs/Vector3 angular : 角速度 (rad/s)
・geometry_msgs/Vector3
・float64 x
・float64 y
・float64 z
3. ros_gz の準備
「ros_gz」は、ROS2とGazeboを橋渡しするためのインターフェースを提供するパッケージです。
(1) パッケージのインストール。
$ sudo apt update
$ sudo apt install ros-jazzy-ros-gz4. SDF の準備
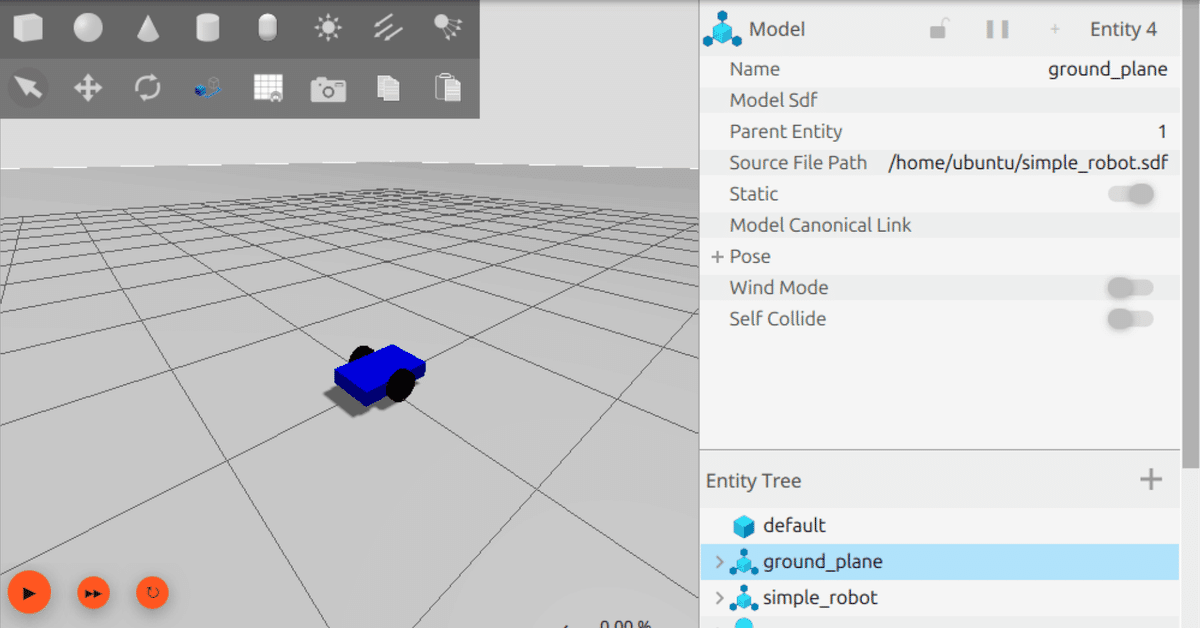
「SDF」 (Simulation Description Format) は、「Gazebo」で使用されるXMLベースのフォーマットです。ロボットやシミュレーション環境全体の詳細な設定を記述します。
(1) SDFの作成。
シンプルな差動二輪ロボットのSDFファイルを作成します。
・simple_robot.sdf
<?xml version="1.0" ?>
<!-- シンプルな差動二輪ロボットのSDFファイル -->
<sdf version="1.8">
<world name="simple_world">
<!-- 物理シミュレーションの設定 -->
<physics name="1ms" type="ignored">
<max_step_size>0.001</max_step_size> <!-- シミュレーションの時間刻み -->
<real_time_factor>1.0</real_time_factor> <!-- リアルタイム係数 -->
</physics>
<!-- 必要なプラグインの読み込み -->
<plugin filename="gz-sim-physics-system" name="gz::sim::systems::Physics"/>
<plugin filename="gz-sim-scene-broadcaster-system" name="gz::sim::systems::SceneBroadcaster"/>
<plugin filename="gz-sim-user-commands-system" name="gz::sim::systems::UserCommands"/>
<!-- 太陽光源の設定 -->
<light type="directional" name="sun">
<cast_shadows>true</cast_shadows>
<pose>0 0 10 0 0 0</pose> <!-- 光源の位置 -->
<diffuse>0.8 0.8 0.8 1</diffuse> <!-- 拡散光 -->
<specular>0.2 0.2 0.2 1</specular> <!-- 鏡面光 -->
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>-0.5 0.1 -0.9</direction> <!-- 光の方向 -->
</light>
<!-- 地面モデルの設定 -->
<model name="ground_plane">
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<plane>
<normal>0 0 1</normal>
</plane>
</geometry>
</collision>
<visual name="visual">
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size> <!-- 地面の大きさ -->
</plane>
</geometry>
<material>
<ambient>0.8 0.8 0.8 1</ambient>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.8 0.8 0.8 1</specular>
</material>
</visual>
</link>
</model>
<!-- ロボット本体の設定 -->
<model name="simple_robot">
<pose>0 0 0.1 0 0 0</pose> <!-- ロボットの初期位置 -->
<!-- ベースリンク(本体) -->
<link name="base_link">
<inertial>
<mass>1.0</mass> <!-- 本体の質量 -->
<inertia> <!-- 慣性モーメント -->
<ixx>0.0835</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.1209</iyy>
<iyz>0</iyz>
<izz>0.1209</izz>
</inertia>
</inertial>
<visual name="visual">
<geometry>
<box>
<size>0.5 0.3 0.1</size> <!-- 本体のサイズ -->
</box>
</geometry>
<material>
<ambient>0 0 1 1</ambient> <!-- 青色 -->
<diffuse>0 0 1 1</diffuse>
<specular>0 0 1 1</specular>
</material>
</visual>
<collision name="collision">
<geometry>
<box>
<size>0.5 0.3 0.1</size>
</box>
</geometry>
</collision>
</link>
<!-- 左車輪 -->
<link name="left_wheel">
<pose relative_to="base_link">0 0.175 0 -1.5708 0 0</pose> <!-- 左車輪の位置 -->
<inertial>
<mass>0.5</mass> <!-- 車輪の質量 -->
<inertia>
<ixx>0.00125</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.00125</iyy>
<iyz>0</iyz>
<izz>0.002</izz>
</inertia>
</inertial>
<visual name="visual">
<geometry>
<cylinder>
<radius>0.1</radius> <!-- 車輪の半径 -->
<length>0.05</length> <!-- 車輪の幅 -->
</cylinder>
</geometry>
<material>
<ambient>0 0 0 1</ambient> <!-- 黒色 -->
<diffuse>0 0 0 1</diffuse>
<specular>0 0 0 1</specular>
</material>
</visual>
<collision name="collision">
<geometry>
<cylinder>
<radius>0.1</radius>
<length>0.05</length>
</cylinder>
</geometry>
</collision>
</link>
<!-- 右車輪(左車輪と同様の設定) -->
<link name="right_wheel">
<pose relative_to="base_link">0 -0.175 0 -1.5708 0 0</pose> <!-- 右車輪の位置 -->
<inertial>
<mass>0.5</mass>
<inertia>
<ixx>0.00125</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.00125</iyy>
<iyz>0</iyz>
<izz>0.002</izz>
</inertia>
</inertial>
<visual name="visual">
<geometry>
<cylinder>
<radius>0.1</radius>
<length>0.05</length>
</cylinder>
</geometry>
<material>
<ambient>0 0 0 1</ambient>
<diffuse>0 0 0 1</diffuse>
<specular>0 0 0 1</specular>
</material>
</visual>
<collision name="collision">
<geometry>
<cylinder>
<radius>0.1</radius>
<length>0.05</length>
</cylinder>
</geometry>
</collision>
</link>
<!-- キャスター(補助輪) -->
<link name="caster">
<pose relative_to="base_link">-0.2 0 -0.05 0 0 0</pose> <!-- キャスターの位置 -->
<inertial>
<mass>0.1</mass> <!-- キャスターの質量 -->
<inertia>
<ixx>0.0001</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.0001</iyy>
<iyz>0</iyz>
<izz>0.0001</izz>
</inertia>
</inertial>
<collision name="collision">
<geometry>
<sphere>
<radius>0.05</radius> <!-- キャスターの半径 -->
</sphere>
</geometry>
</collision>
<visual name="visual">
<geometry>
<sphere>
<radius>0.05</radius>
</sphere>
</geometry>
<material>
<ambient>0.8 0.8 0.8 1</ambient> <!-- グレー色 -->
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.8 0.8 0.8 1</specular>
</material>
</visual>
</link>
<!-- 左車輪のジョイント -->
<joint name="left_wheel_joint" type="revolute">
<parent>base_link</parent>
<child>left_wheel</child>
<axis>
<xyz>0 0 1</xyz> <!-- 回転軸 -->
<limit>
<lower>-1.79769e+308</lower> <!-- 回転制限なし -->
<upper>1.79769e+308</upper>
</limit>
</axis>
</joint>
<!-- 右車輪のジョイント -->
<joint name="right_wheel_joint" type="revolute">
<parent>base_link</parent>
<child>right_wheel</child>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-1.79769e+308</lower>
<upper>1.79769e+308</upper>
</limit>
</axis>
</joint>
<!-- キャスターのジョイント(固定) -->
<joint name="caster_joint" type="fixed">
<parent>base_link</parent>
<child>caster</child>
</joint>
<!-- 差動駆動システムのプラグイン -->
<plugin filename="gz-sim-diff-drive-system" name="gz::sim::systems::DiffDrive">
<topic>cmd_vel</topic> <!-- 速度指令のトピック名 -->
<left_joint>left_wheel_joint</left_joint> <!-- 左車輪のジョイント名 -->
<right_joint>right_wheel_joint</right_joint> <!-- 右車輪のジョイント名 -->
<wheel_separation>0.35</wheel_separation> <!-- 車輪間距離 -->
<wheel_radius>0.1</wheel_radius> <!-- 車輪半径 -->
<odom_publish_frequency>50</odom_publish_frequency> <!-- Odometry公開の頻度 -->
</plugin>
</model>
</world>
</sdf>次の4つのプラグインが使われています。
・gz::sim::systems::Physics : 物理シミュレーション
・gz::sim::systems::SceneBroadcaster : 外部にシーン情報を送信
・gz::sim::systems::UserCommands : 外部から命令を受信
・gz::sim::systems::DiffDrive : 差動駆動ロボットのシミュレーション
「gz::sim::systems::DiffDrive」の主なパラメータは次のとおりです。
<plugin filename="gz-sim-diff-drive-system" name="gz::sim::systems::DiffDrive">
<!-- 速度命令を受信するトピック -->
<cmd_vel_topic>/cmd_vel</cmd_vel_topic> <!-- 速度命令を受信するトピック (通常は/cmd_vel)
<!-- 車輪の接続ジョイント -->
<left_joint>left_wheel_joint</left_joint> <!-- 左車輪に対応するジョイント名 -->
<right_joint>right_wheel_joint</right_joint> <!-- 右車輪に対応するジョイント名 -->
<!-- 車輪の物理的特性 -->
<wheel_separation>0.5</wheel_separation> <!-- 左右の車輪の間隔 (メートル) -->
<wheel_radius>0.15</wheel_radius> <!-- 車輪の半径 (メートル) -->
<!-- 最大速度と加速度 -->
<max_linear_velocity>2.0</max_linear_velocity> <!-- 最大線形速度 (m/s) -->
<max_angular_velocity>1.0</max_angular_velocity> <!-- 最大角速度 (rad/s) -->
<max_linear_acceleration>1.0</max_linear_acceleration> <!-- 最大線形加速度 (m/s^2) -->
<max_angular_acceleration>0.5</max_angular_acceleration> <!-- 最大角加速度 (rad/s^2) -->
<!-- Odometryの設定 -->
<odom_publish_frequency>1</odom_publish_frequency> <!-- Odometry公開の頻度 -->
<odom_topic>odom</odom_topic> <!-- Odometryトピック名 -->
<frame_id>odom</frame_id> <!-- OdometryフレームID -->
<child_frame_id>base_link</child_frame_id> <!-- ロボットのベースフレームID -->
</plugin>
プラグインがどのエンティティ(モデル、リンク、センサー、世界など)に影響を与えるかは、そのプラグインがSDF内のどこに記述されるかによって決まります。
・<world>
世界全体に影響を与えるプラグイン
(例: 物理エンジン、環境管理など)
・<model>
特定のモデルに影響を与えるプラグイン
(例: 移動制御、センサーモデルなど)
・<sensor>
特定のセンサーに影響を与えるプラグイン
(例: カメラ画像処理)
5. Gazeboの実行
(1) ターミナルを開いて「Gazebo」を起動。
$ gz sim simple_robot.sdf(2) 別のターミナルを開いて「/cmd_vel」をROS2にブリッジ。
$ ros2 run ros_gz_bridge parameter_bridge /cmd_vel@geometry_msgs/msg/Twist@gz.msgs.Twist(3) 別のターミナルを開いて「teleop_twist_keyboard」を起動。
$ ros2 run teleop_twist_keyboard teleop_twist_keyboard(4) 「Gazebo」左下の▶をクリック。
物理シミュレーションが開始します。
(5) 「teleop_twist_keyboard」のターミナルをフォーカスして、「i」をクリック。
ロボットが前進します。

6. launchファイル
6-1. launchファイル
「launchファイル」は、ROS2のロボットシステムを構成する複数のノードやリソースをまとめて起動・設定・制御するためのスクリプトです。Pythonで記述するため、柔軟でプログラマブルな設定が可能です。
6-2. launchファイル の作成
次の3つの命令をまとめた「launchファイル」を作成します。
$ gz sim simple_robot.sdf$ ros2 run ros_gz_bridge parameter_bridge /cmd_vel@geometry_msgs/msg/Twist@gz.msgs.Twist$ ros2 run teleop_twist_keyboard teleop_twist_keyboard(1) 「launchファイル」の作成。
最初の2つの命令はlog出力、「teleop_twist_keyboard」はキー入力が必要なため「xterm」で画面出力しています。
・run_simple_robot.py
from launch import LaunchDescription
from launch.actions import ExecuteProcess
def generate_launch_description():
return LaunchDescription([
# Gazeboの起動
ExecuteProcess(
cmd=['gz', 'sim', 'simple_robot.sdf'],
output='log',
log_cmd=True
),
# ブリッジの起動
ExecuteProcess(
cmd=[
'ros2', 'run', 'ros_gz_bridge', 'parameter_bridge',
'/cmd_vel@geometry_msgs/msg/Twist@gz.msgs.Twist'
],
output='log',
log_cmd=True
),
# teleop_twist_keyboardの起動
ExecuteProcess(
cmd=['ros2', 'run', 'teleop_twist_keyboard', 'teleop_twist_keyboard'],
output='screen',
prefix='xterm -e'
),
])(2) 「xterm」がない場合はインストール。
sudo apt install xterm6-3. launchファイル の実行
(1) 絶対パスで起動。
「Gazebo」の▶で物理シミュレーションを開始し、xtermで「i」で前進するか試してみてください。
$ ros2 launch ~/run_simple_robot.py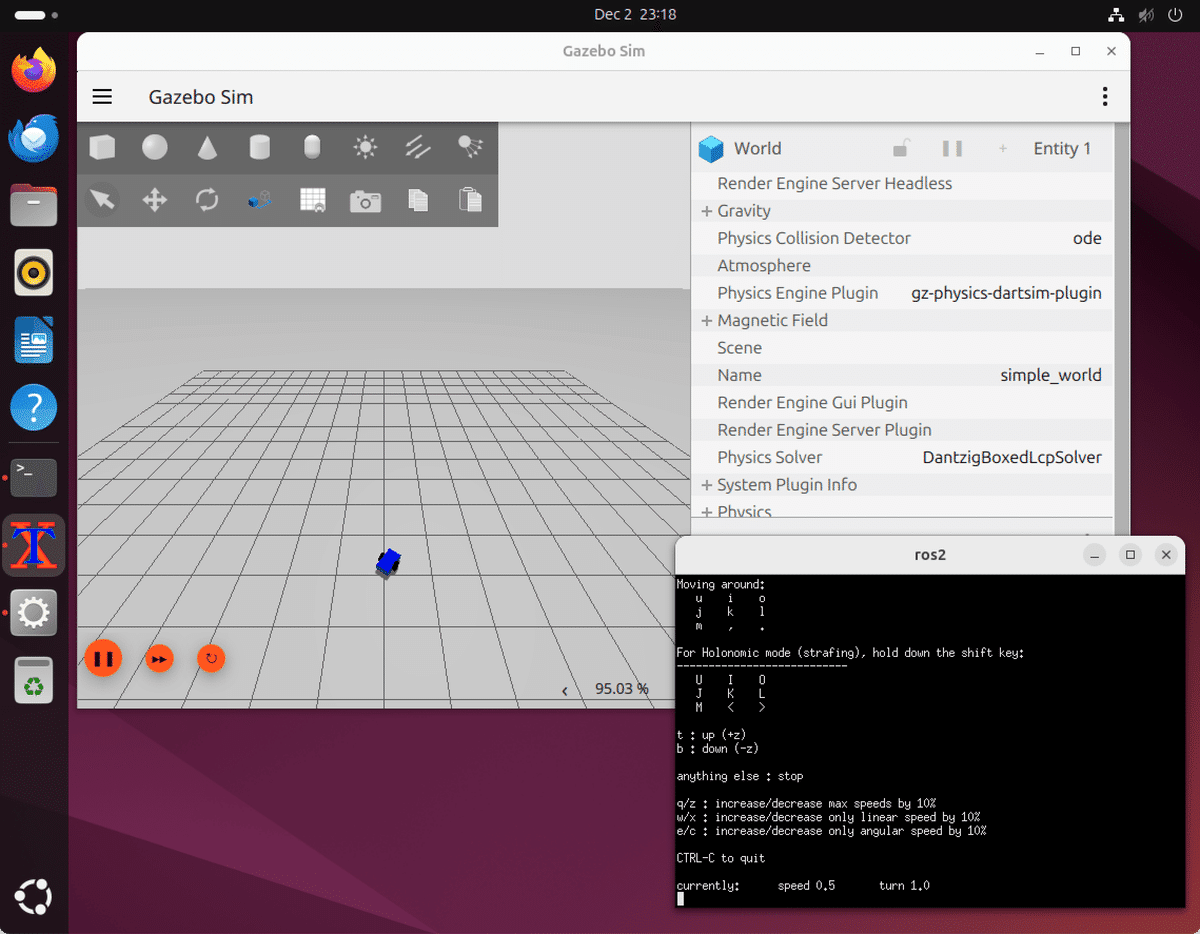
【おまけ】 ブリッジ前のトピック確認
(1) トピック一覧の確認。
$ gz topic -l/clock
/cmd_vel
/gazebo/resource_paths
/gui/camera/pose
/gui/currently_tracked
/gui/track
/model/simple_robot/odometry
/model/simple_robot/tf
/stats
/world/simple_world/clock
/world/simple_world/dynamic_pose/info
/world/simple_world/pose/info
/world/simple_world/scene/deletion
/world/simple_world/scene/info
/world/simple_world/state
/world/simple_world/stats
/model/simple_robot/enable
/world/simple_world/light_config
/world/simple_world/material_color(2) データ型の確認。
$ gz topic -i -t /cmd_velPublishers [Address, Message Type]:
tcp://192.168.64.6:39751, gz.msgs.Twist
Subscribers [Address, Message Type]:
tcp://192.168.64.6:33995, gz.msgs.Twist
tcp://192.168.64.6:39751, gz.msgs.Twist
(3) リアルタイムデータを確認。
$ gz topic -e -t /cmd_vellinear {
x: 0.5
}
angular {
z: 1
}
linear {
}
angular {
}