
生産性向上に貢献!!農業用ロボット特許

【経営者のための知的財産情報】
弁理士の坂岡範穗(さかおかのりお)です。
今回は、「生産性向上に貢献する農業用ロボット」をお伝えします。
※出願等のお問い合わせはこちらから👇
http://www.sakaoka.jp/contact
1.トマト自動収穫ロボット
少し前の伊勢新聞の話なのですが、「トマト自動収穫ロボ開発」「デンソー、欧州で受注開始」との記事が掲載されていました。
記事によりますと、「デンソーはミニトマトの自動収穫ロボットを開発し、欧州で受注を始めた。」「欧州では人口減少による人手不足と賃金上昇が問題となっており、自動化の需要が高まると見込んだ。」とあります。
なかなか面白そうですね。
デンソーといえば、自動車部品で有名な会社です。
すぐにスパークプラグ、オルタネーター、エアコンコンプレッサーなどの製品が思い浮かびます。
そんなデンソーが、「これまで車両部品製造で培ってきた画像認識や安全走行の技術を応用した。」と同記事にあります。
2.人手不足を補うロボット化
上記の記事にもあるように、欧州でも人手不足のようです。
日本と同様に、農業分野は労働者に人気が無いのかも知れません。
そういった背景から、省人化を図る目的でロボット化が進んでいるだと思われます。
記事によりますと、「ロボットは1時間の収穫量が30キロで、人間1人が可能な90キロの3分の1にとどまるが、昼夜を問わずに稼働できることが強みだ。」とあります。
まさしく、これがロボットの強みですね。
ロボットの価格と耐用年数、メンテナンス等のランニングコスト、ロボットが収穫した作物の選別等の費用が人件費を下回れば、ロボットを導入する方が経済的です。
3.農業用ロボットの特許の特許分類とヒット件数
上記のことから農業用ロボットの特許について興味が出てきました。
そこで、農業用ロボットの特許をいくつか取り上げてみます。
先ず、農業用ロボットに関する特許分類を特定します。
見てみると、以下のものが該当しそうです。
(1)FI(ファイルインデックス)
A01D 46/30 ・個別に作物を摘み取るロボット的な装置
(2)Fターム
テーマコード 2B075 収穫機本体
観点 JF00. 果実、野菜等の収穫ロボット
昭和46年以降の文献について、上記の(1)と(2)を論理和で検索してみると524件がヒットしました。
この中から、株式会社デンソーが出願しているものは14件ありました。
4.抽出した特許の紹介
さて、上記の検索式でヒットした文献の中から面白そうなのをいくつか紹介します。
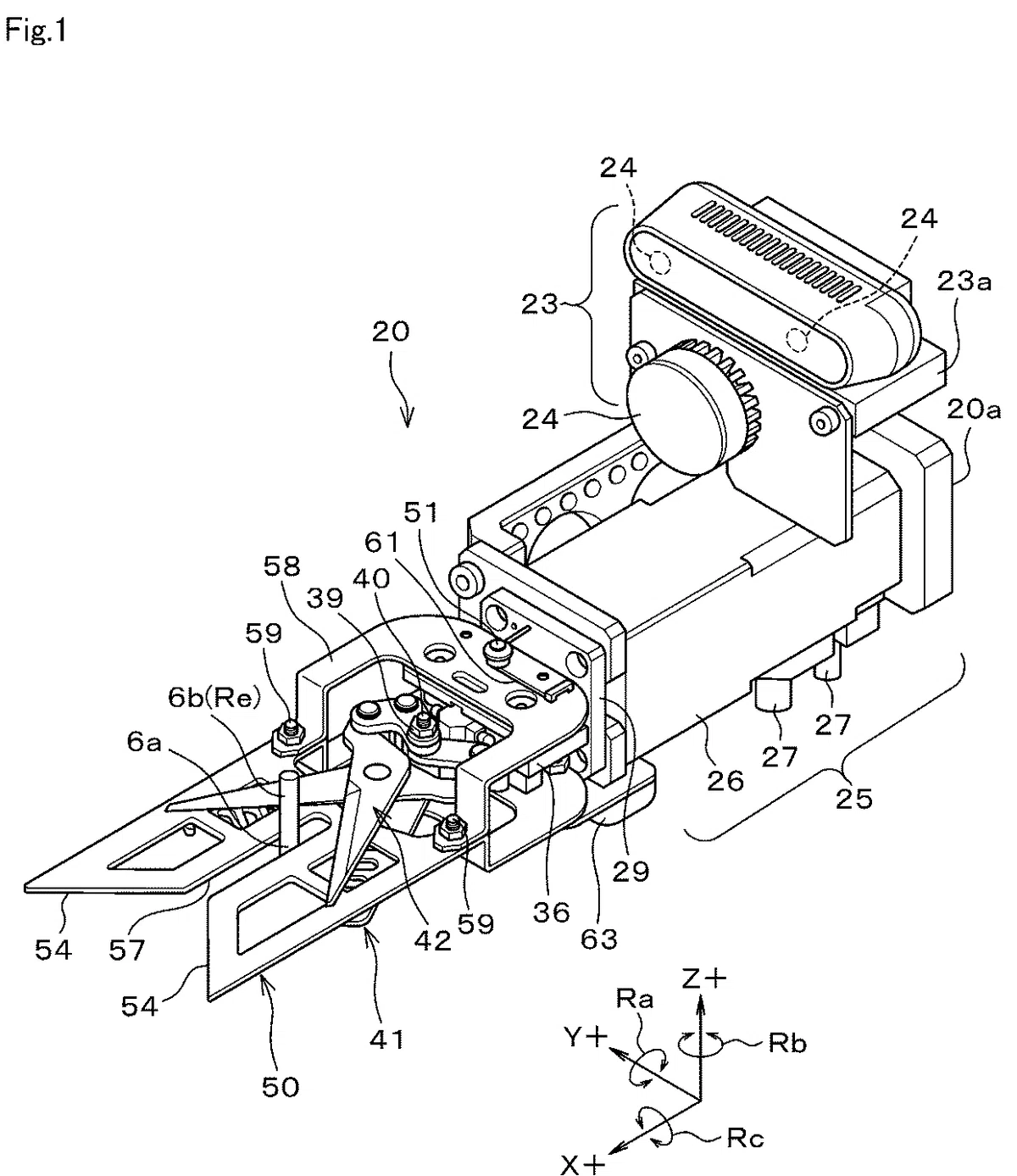
(1)特許第7226295号 株式会社デンソー
【発明の名称】エンドエフェクタ
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7226295/15/ja
この発明は、ミニトマトの茎を切断するエンドエフェクタに関するものです。
図3に示すようなミニトマトを収穫するとき、切断対象部6bを切りたいのであって、主茎6は切りたくない。
このため、ガード部材50のガイド溝57の幅を、主茎6より狭くして切断刃組42の可動範囲内に入らないようにしたものです。
さらに、ガード部材50が図1の水平方向に動くことで、画像認識が上手くいかないときでも切断対象部6bが上手く切断刃組42の可動範囲に入るようにしてあります。
(2)特許第7459786号 株式会社デンソー
【発明の名称】農作物収穫装置、及び農作物収穫システム
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7459786/15/ja
この発明も、デンソーが出願人で、ミニトマトを収穫する装置に関するものです。
開閉可能に構成されて、果柄93を挟んで保持可能な保持機構20と、
保持機構20の下側に設けられ、開閉可能に構成されて実91をこそぎ落とす分離機構30と、を備える装置です。
平面視で図19,図22のようにミニトマトの茎を挟んで、側面視で図21,図23,図25のようにミニトマトの実を収穫します。

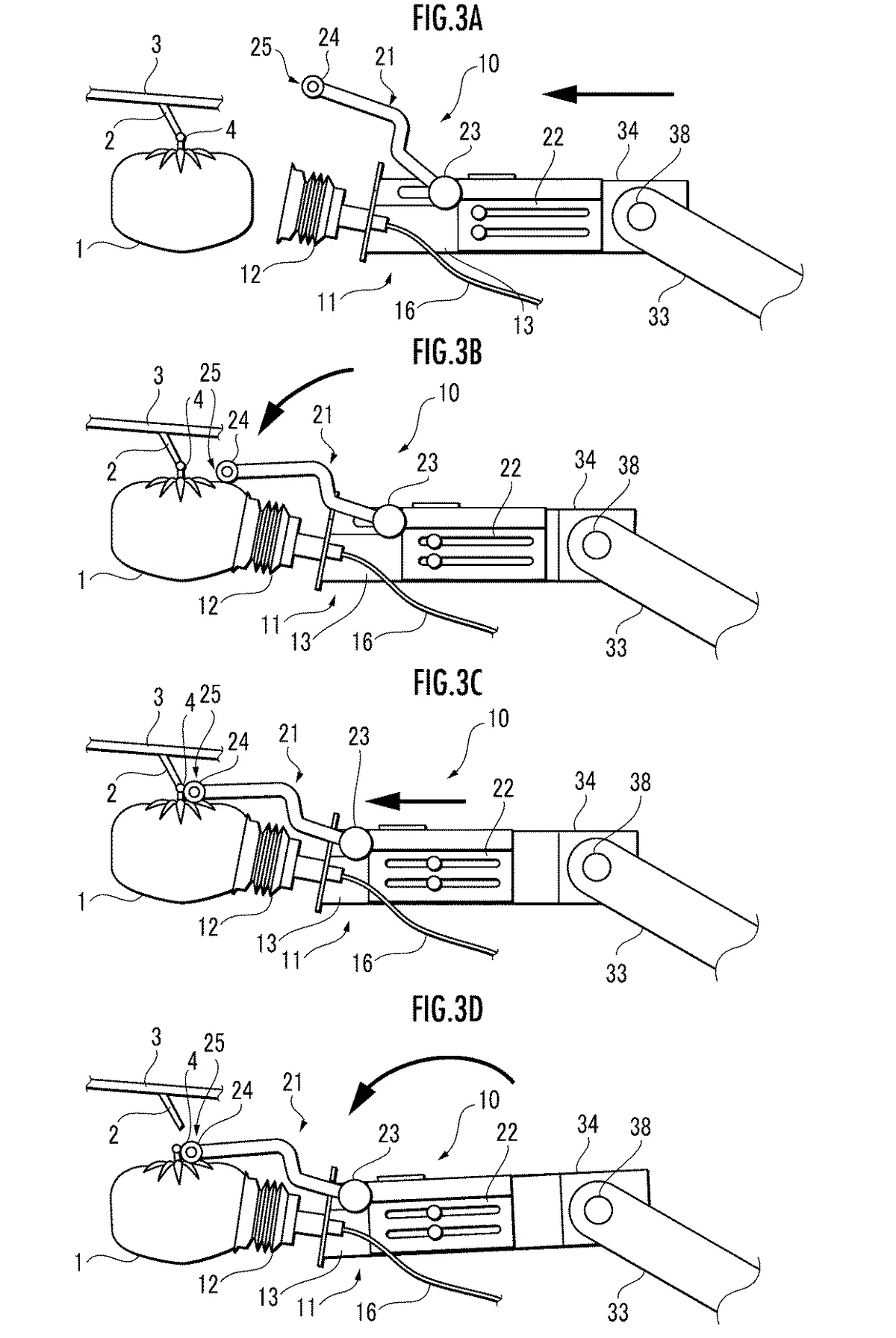
(3)特許第6912656号 本田技研工業株式会社
【発明の名称】果菜収穫装置
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-6912656/15/ja
この発明の出願人は、自動車や二輪車で有名な本田技研工業株式会社(ホンダ)となっております。
ホンダは耕耘機なども製造しておりますので、こういった分野の出願もあるのでしょうね。
この発明は、吸着パッド15を備える保持部12で果菜1を保持しつつ、指部21の当接部25を果梗2に当接させます。
その後、収穫ハンド11を回転させて当接部25を果梗2に押し込んで、果菜1を収穫する装置です。
5.考察
いかがでしょうか。一昔前では考えられなかったロボットが開発されていますね。
このようなロボットが普及すれば、省人化が図れて生産性も向上しそうです。
日本でも、30年間賃金があまり上がらなかったことと円安によって、海外からの技能実習生があまり来てくれないようです。
ロボットは、当初は海外にある大規模農家への導入に限られそうですが、我が国でもこういったロボットが将来普及するかもしれませんね。
6.中小企業が参考にするところ
今回、農業分野では後発組と考えられるデンソーの特許を見ていて、思ったことがあります。
それは、上記の特許分類におけるデンソーの特許出願14件の全てが、ミニトマトに関するものでした。
一部に通常の大玉のトマトについての文献がありましたが、その文献においてもミニトマトの記載がありました。
なぜ、ミニトマトなのかを考えたとき、その粒の小ささがあると思われます。
同じキロ数を収穫するのに、粒が小さいとその分収穫の手間がかかります。
ネット情報ですが、普通のトマトに比較して、ミニトマトの栽培の人件費は倍以上かかるようです。
また、小売価格にしても、同じ重量であればミニトマトの方が高い気がします。
私の推測ですが、デンソーはこのような背景から、ミニトマトの収穫ロボット分野に参入を決めたのではないでしょうか。
デンソーという大企業であっても、先ずは自分たちに勝算があるところを探して、そこに集中するということですね。
中小企業でも、こういった検討は重要と思われます。
農業に話を戻しまして、規模の小さな農家では、上記の様なロボットをおいそれと導入することは難しいと考えます。
そのようなところでは、先ずは道具や治具などを工夫して、少しずつ日々の作業を改善していくことが良いのかもしれません。
この記事が御社の発展に寄与することを願っております。
引用
¹株式会社デンソー.エンドエフェクタ.特許第7226295号.
²株式会社デンソー.農作物収穫装置、及び農作物収穫システム.特許第7459786号.
³ホンダ技研工業株式会社.果菜収穫装置.特許第6912656号.
坂岡特許事務所 弁理士 坂岡範穗(さかおかのりお)
※自社の技術の権利化をお考えの人のお問い合わせはこちらから👇
http://www.sakaoka.jp/contact

ホームページ http://www.sakaoka.jp/
YouTube https://www.youtube.com/channel/UCbd1ApyZxN-PsVUn3XRSS-Q
Facebook https://www.facebook.com/profile.php?id=61561703544400
Twitter https://twitter.com/sakaoka
※Facebookページが2024年7月より新しいものになりました。