
リンク機構ロボ「TVictory」の作り方

ロボ本体作り方は無料です!作った後,有料記事でVerUP! では早速...
はじめに
タミヤ製工作材料を使ったオリジナルリンク機構ロボット「TVictory」の作り方を紹介します.
iOS/iPadOS アプリ「ロボ指南1エム・ビクトリー編」で発表したロボット「MVictory」を初心者向けに設計しなおした六脚歩行ロボットです.リンク機構を簡略化し,使用材料,サイズを最小化して組み立て性を改善しました.ノコギリによる切断や,ドリルによる穴あけなど難しい加工が不要なのでぜひ挑戦してみて下さい.
構造
リンク機構
図1はロボット側面の画像です.ギヤボックスの出力軸に取り付けられたクランク(画像では見えない)のクランクピンを介して回転運動が脚のリンク構造に伝えられます.前脚,後脚はピポットを中心とした揺動(振り子)運動を行い,中脚は円運動を行います.
前後脚は上げ下げしない簡易的な「なんちゃって」脚にすることで MVictory より機構を大幅に簡略化できました.

中脚は,クランクピンから前後脚を駆動する2つのロッドの中間で結合する2本のV字のロッドで構成されています.この構造で,クランクの回転と同じ位相(回転角度)で中脚先端が回転運動します.
前後脚はピポットを中心に脚端と逆の位置で駆動されるので,中脚と前後脚では前後運動するタイミングが逆転します.
このV字の脚機構はおそらく筆者オリジナルではないかと思います.
運動の様子を下記 GIF アニメで示します.
本体構造
ロボットの上面および下面の画像を図3に示します.
ロボットの本体は,電池ボックスに2本の固定ロッドを接着したものです.
電池ボックスの上にギヤボックスとスイッチを接着で固定しています.
脚リンク機構は固定ロッドの前後端に装着されたネジとクランクピンとして用いるネジの3本のネジで支持されます.
電池ボックスを構造部材とする大胆な設計により部品点数の抑制と製作性の向上が図られました.

材料
タミヤタミヤ工作材料
以下の(株)タミヤ製の工作材料を用います.
ロングユニバーサルアームセット(ITEM 69919/70156/70184のいずれか)1セット
シングルギヤボックス(4速タイプ)(ITEM 70167)1セット
単三電池ボックス(1本用x2)(ITEM 70150)1セット
3mm六角シャフトセット(ITEM 70252)より 50mm シャフト1本

ロングユニバーサルアームセットは色別に,透明,灰色,オレンジ色の3種類があり,好きな色を選んでください.ここでは透明色を用いました.
TVictory では1本用の電池ボックスをわざわざ繋げて2本用の電池ボックスとして使用します.その理由は電池ボックスの構造にあります.2本専用の電池ボックスは,側面の部材が細く,電池を装着する際に変形してホールドするような構造になっています.TVictory は電池ボックスの側面にユニバーサルアームを接着し本体構造とします.そこで2本専用のものを使用すると,側面の変形を抑制しますので電池の着脱に使用をきたす恐れがあります.また,接着面の面積が1本用の方が広いという利点もあります.
ナット
必要なナットの個数は 26 ですが,ロングユニバーサルアームは 15 個,ギヤボックスは 4 個しか付属していないので足りません.
M3 の六角ナットを別途入手して下さい.タミヤ工作材料に付属するナットの高さ(雌ねじの長さ)は JIS B1181 3種で,一般的な同1種より低い(薄い)です.1種を用いても構いませんが,使用法に注意して下さい.詳細は「準備編1)タミヤ工作材料と使い方」をご覧ください.

リード線
モーターに電流を流すリード線は電池ボックスに付属していますが,かなり短いので別途入手する必要があります.
接着剤
瞬間接着剤は必須なので入手して下さい.
瞬間接着剤用の硬化促進剤または代用としてプライマリーはある方が良いのでぜひ入手して下さい.
本体は接着で作成します.瞬間接着剤でも構いませんが,プラスチック用のもの,プラモデル用接着剤またはABS樹脂用接着剤をお勧めします.
詳細は「準備編1)タミヤ工作材料と使い方」をご覧ください.
設計図
図6はロボットの設計図です.
部品の配置や組み立て状態を把握するためのもので,ユニバーサルアームの穴やギヤボックスの実際の凹凸などは省き,かなり簡略化しています.
また,正式な機械製図の製図法・表記法から逸脱していることにご容赦願います.
筆者は,機械設計用の CAD を用いるのではなく,汎用の 2D ドローソフト(KeynoteやPowerPoint)を用いています.NIロボシリーズは macOS 上で無料で使用できる Keynote で設計しています.そのため,例えば,中心線は正式には一点鎖線で描きますが Keynote では使用できないので普通の直線で代用しています.
NIロボでは既製品(ギヤボックスや電池ボックス)と単純な形状の部品(ユニバーサルアーム)しか用いないので,既製品は設計に必要十分な単純な形状に置き換えることで,ほぼ矩形と円の組み合わせで表現できます.
そこで使い方により CAD よりも汎用ドローソフトの方が良いと感じております.

上の図はロボット上方から見た上面図で,下の図は側面から見た側面図です.
部品は種別やサイズごとに半透明色で彩色されており,重なり具合が判別できるようにしています.
例えばビスの頭は赤,ナットはオレンジ色としています.その他の部品と色の対応関係は図1と3の画像と見比べて把握して下さい.
側面図ではクランクピンの位置が実際とは異なり,ギヤボックスの出力軸と重なっています.これは筆者の設計法で,脚の配置やサイズのバランスを見るのにその方が適しており,また,作図や変更が容易であると感じています.ただ,運動状態や運動による部品の干渉の予測は難しいので,実際のクランクの位置での作図もその後行います.その際,クランクの角度を最低 90° の間隔で4状態描画し,必要ならばさらにその間の 45° 間隔での描画を行い状態をチェックします.前出のリンク機能のアニメはそのようにして作成したものです.
脚リンク機構のロッドの重なり順序に気をつけて下さい.
右側,左側の機構を対称としなくてもロボットの歩行には問題ありませんが,オプションの部品を追加する予定があるので,設計図のとおり中脚の前方のロッドが外側になるように配置にして下さい.
製作法
電池ボックスの組み立て
マニュアルに従って電池ボックスに電極の金属を取り付け,スイッチを組み立てて下さい.これも「準備編1)タミヤ工作材料と使い方」を参考にして下さい.
電池ボックスの加工・接着
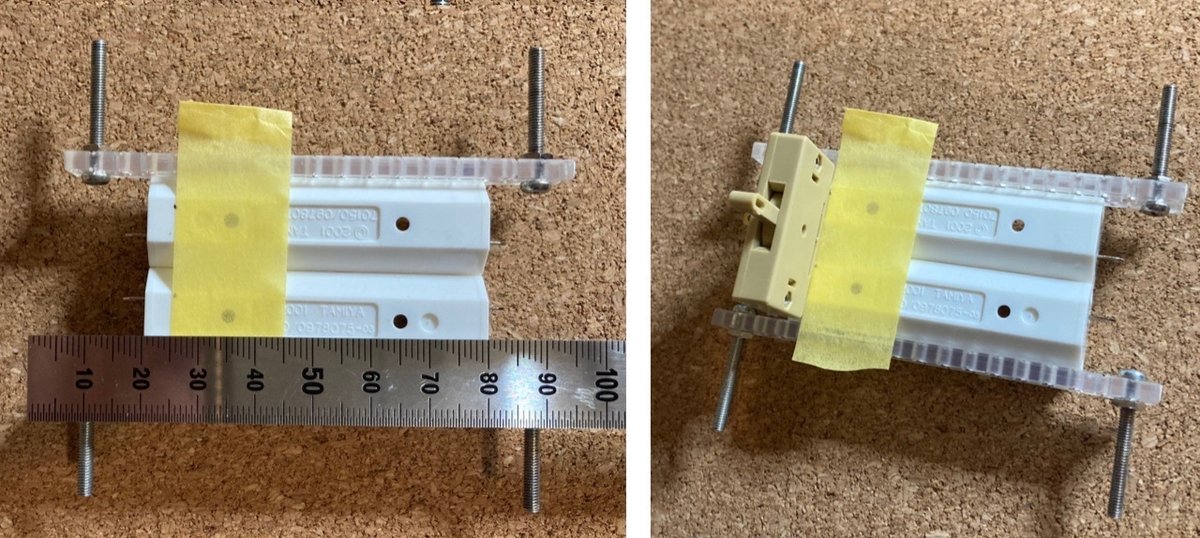
2つの電池ボックスを接着し,1つにまとめます.その際,マニュアルとは逆に端子の間隔が狭い組み合わせにします.

さらに,接着する前に,電池ボックスを1つにまとめた後に外側の側面に出っ張るノッチをカッターで削ります.
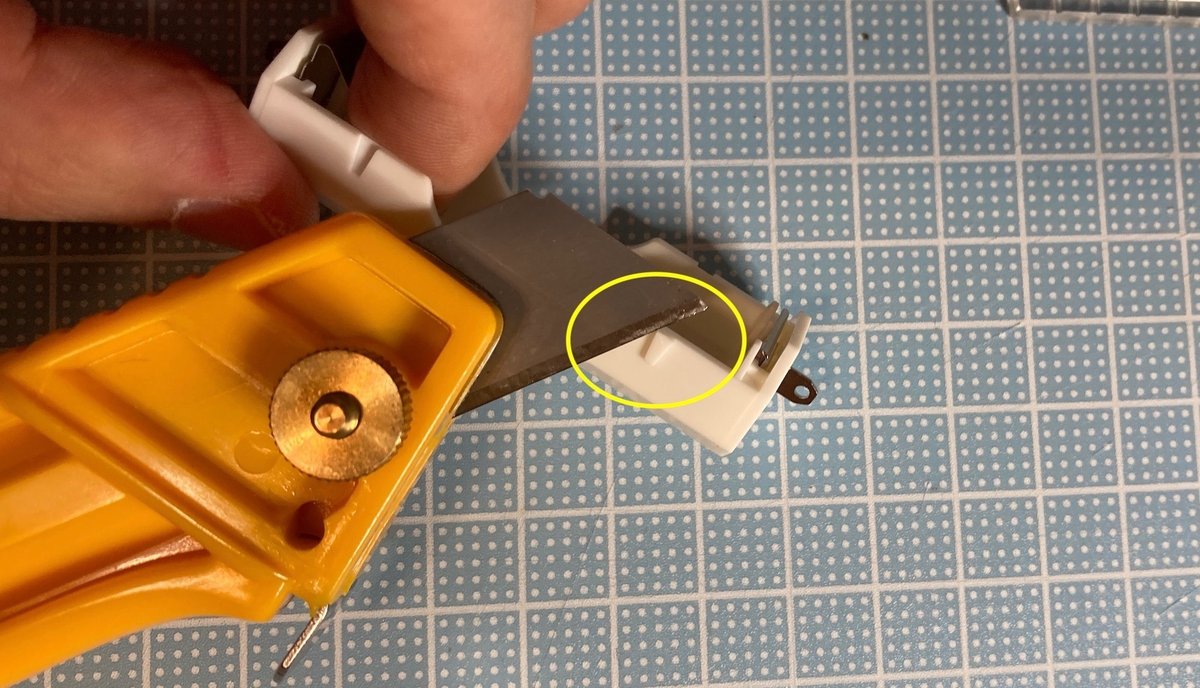
電池ボックスを接着し,洗濯バサミで固定して養生します.

ユニバーサルアームの切断
図10の寸法でロングユニバーサルアームを切断します.
数字は部材の長さです.長さによって色分けしています.
90mm は本体用で2個,50mm は脚のリンク機構用で 12個,10mm はクランクに装着するスペーサー用で2個必要です.
切断面には穴の凹みが残るので,切断面がなるべく脚先端に配置されないように分割するパターンを決めています.
そこで 50mm の部材をとるアームでは,10mm のを内側から切り出しています.


脚リンク機構の組み立て
脚リンク機構に使用する部材を並べてサイズと配置を確認しながら組み立てると間違えが防止できます.
脚リンク機構は全て 50mm のロッドで構成されています.

図13に組み立て状態を示します.
なるべく脚の先端がユニバーサルアームの端部となるような配置とします.
中脚の上部の結合位置が,ロッドの中心でないことに注意して下さい.クランクピンからの距離が 15mm の位置の穴で結合します(図6,13参照).
「上」「下」は画面鉛直方向の重なり具合を表しています.「上」がロボットの外側,「下」は内側になります.

長さ 10mm のビスとナットで関節を組み立てます.ナットの種別は問いません.
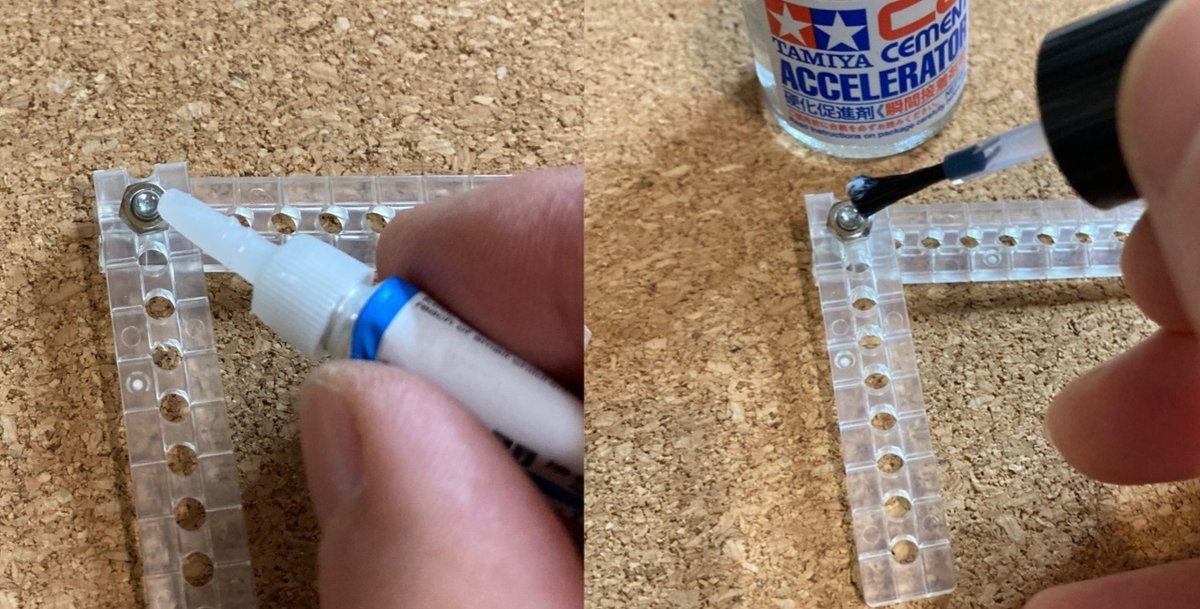
ガタつきが無く,軽くまわるようにナットを締め,ナットと雄ねじの隙間に瞬間接着剤を少量浸透させ固定します.
薄く延ばされていない状態の瞬間接着剤の硬化はかなり時間を要しますので(1日くらい),瞬間接着剤用の硬化促進剤またはプライマリーを滴下して硬化を早めると作業を早く進行できます.
雄ねじと雌ねじの隙間に接着剤が浸透していない場合があるので,固定後,ナットが緩まないか確認し,緩んでいたら再度固定しましょう.
長さ 90mm の固定ロッドの両端に M3L25 ビスを装着します.
ギヤボックスの組み立て
モーター対出力軸の速度比は一番低速な 344.2:1 のタイプDで組み立てます.
具体的な組み立て方は付属のマニュアルを参照して下さい.
組み立て方のコツを「準備編1)タミヤ工作材料と使い方」に記載しています.
使用する出力軸である六角シャフトは付属のものではなく,六角シャフトセットの長さ 50mm のものを使用して下さい.
六角ボスの位置は,13.5mm にセットして下さい.

クランクの加工と装着
クランクの長い方をニッパーなどで切断します(図16左).使用する側を破損しないように注意しましょう.切断後はヤスリで整形すると良いです.
切断後,外側の穴に長さ 20mm のビスを挿入し,長さ 10mm のユニバーサルアームの部材を取り付けます(図16中).ナットはタミヤ工作材料付属の3種を使用します.これ以外の場所で使用するナットの種別は問いません.
次にギャボックスの六角シャフトに取り付けます.左右のクランクの角度が違いに180°になるように同時に押し込みます.

固定ロッドの固定
固定ロッドを電池ボックスに固定します.
電池ボックスの側面に接着剤を塗布し,固定ロッドを先端から 15mm の位置で接着します.その際,電池ボックスの底とロッドのエッジを同一平面にそろえます.洗濯バサミで挟み,15分以上放置すると良いでしょう.

スイッチの取り付け
次に,電池ボックスの背面にスイッチを接着します.
電池ボックス背面にロボットの前方から 5mm の位置に,目印用のメンディングテープを貼ります.油性ペンで線引きしても良いのですが,接着剤の溶剤に溶けて滲むのでテープの方が良いでしょう.接着面に接着剤を塗布し,スイッチを置いて15分以上放置します.
ギヤボックスの固定
ギヤボックスの背面に接着剤を塗布し,電池ボックス背面に乗せます.図のようにスイッチと突き当たり,ギヤボックスのネジ穴のある両端の耳がちょうど固定ロッドの側面のピッタリ内側に配置すると,ギヤボックスの出力軸の位置が自然に設計通りの位置に収まります.
(スイッチを電池ボックスに装着しないでわざわざ上に固定したのはギヤボックスの位置決めを容易にするためでした)
そのまま30分以上できれば半日以上放置して完全に接着するまで待ちます.

モーターの装着と配線
モーターの軸端にピニオンギヤを取り付け,ピニオンギヤ上にグリスを塗り,ギヤボックスに装着します.
図のようにリード線を取り付けます.電池ボックス付属のリード線(青)は短いので足りません.ここでは電池ボックス同士および電池ボックスとスイッチの結線に用いています.
別途入手した白のリード線をモータとスイッチの結線に用いています.
白のリード線は運動機構の邪魔にならないように電池ボックスとギヤボックスの間の隙間に通しています.
結線後は写真のように半田付けすると良いでしょう.

脚リンク機構の装着
固定ロッドから伸びるピポット軸用のネジに,ナットを挿入します.
ナットの位置をロボット前方側では 15.5mm,後方側では 12mm とします.
脚リンク機構を2本のピポット軸とクランクピンの3軸に同時に挿入します.ピポット軸の位置がロッドの中央に来ることに注意します(関節との軸間距20mm).
挿入後,リンク機構の各ロッドが本体と並行になるように,ナットの位置を微調整します.ナットの位置が決まったらピボット軸の雄ねじとナットの雌ねじの間に瞬間接着剤および硬化促進剤を投入し固定します.
その際,ついでに固定ロッドのナットも瞬間接着剤で緩み止めすると良いでしょう.

脚リンク機構を一旦はずし,ピボット軸およびクランクピンにギヤボックスの残りのグリスを塗布します.ただし,ナットが接着できるように,ナットの挿入位置にはグリスが付かないように注意します.
脚リンク機構を再び装着し,ピボットおよびクランクピンのネジにナットを挿入して緩みが無い程度に軽く締め付け,瞬間接着剤で固定します.
この作業を左右行い,完成です.
お疲れ様でした!

走行
走行前に接着剤が十分に硬化するまで時間を置きましょう.
プラスチック用接着剤は溶剤で接着面のプラスチックを溶かし,融合させ,溶剤が材料内部を拡散することで硬化します.表面上固定されていても,溶剤の拡散が十分でないと硬化が不十分で分離する可能性があります.
ナットの固定状態を確認しましょう.ナットの緩みが無いか確認し,緩みが生じる場合には瞬間接着剤で固定し直します.
以上終えたら電池を慎重に装着し,スイッチをオンにしてこれまでの努力が報われる瞬間を楽しんで下さい!
おわりに
タミヤ工作材料を使ったリンク機構ロボット製作例を紹介しました.
小さいながら脚の関節をねじと瞬間接着剤で作ったり,電池ボックスを本体構造に使用するなどNIロボ式のテクニックを盛り込みました.次回以降,今回習得したテクニックを応用し,より複雑で個性的なロボットの製作法を紹介します.
・・・
と,その前に,オプション記事として以下に TVictory の拡張を紹介します.TVictory の完成後,物足りなさを感じたら,ぜひ,トライして下さい!
オプション:「第二形態」への拡張
TVictory の脚にオプションの部品を取り付けることで「第二形態」にグレードアップします.第二形態ではひっくり返しても走行することが出来ます.

材料
ここから先は
¥ 300
この記事が気に入ったらチップで応援してみませんか?