LEGOで二足歩行ロボを作ってみる

カンタンに二足歩行ロボットを作るのに、チェビシェフリンク脚というのがあるらしい。
チェビシェフリンク脚は、チェビシェフリンク機構と水平リンク機構を組み合わせたもの。
これがチェビシェフリンク機構
リンクバーの長さは1:2:2.5:2.5 にするとこんな動きをする。
チェビシェフリンク機構に水平リンク機構を加えたのがこれ。
足をつければチェビシェフリンク脚。
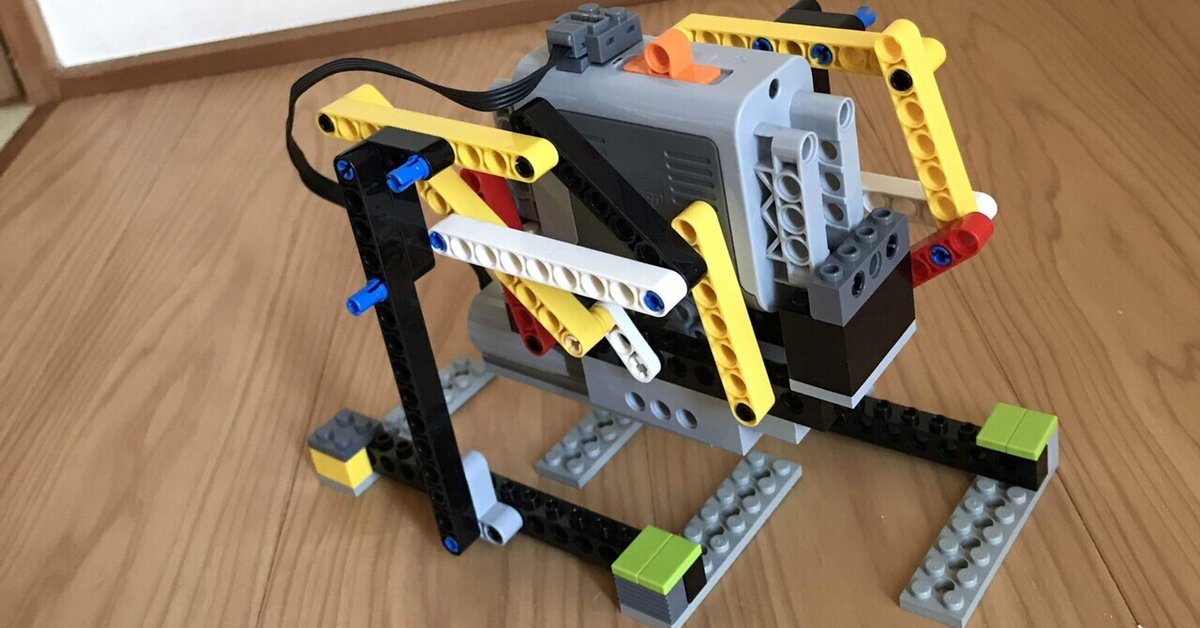
チェビシェフリンク脚を2本用意して本体につければ、二足歩行機構の出来上がり。
作ってみて分かったこと
・足がコの字型でカッコ悪い
⇨オモチャでコの字部分を透明にしていることがある
・片足で、全体重を支えているが、リンク部のピンにモーメント荷重が加わり、ガタが出たり、たわんだりして、上げている足が下がってしまい、足同士が接触してしまう
⇨本体を薄くしたし、リンクピンにはキツい固定用のピンを使用した
・旋回できない
⇨仕方がない
以上