自作のロボットアームの各関節座標をベクトルで表現し、逆運動学計算を行ったときの座標位置を解空間とみなし、条件式を与えて部分空間に分けて姿勢制御に役立てたい!! #0

〇〇してみた系Youtuberへの第一歩だね。
今回は準備編。ロボットアームの構造の簡易化やシミュレーションソフトの下準備をします。
1.構造定義
今回考えるアームは4つのオフセット関節で構成されていて、本来サーボモータの可動域は300[deg]なのでこれを中心を0[deg]と考えて-150~150[deg]の範囲にするはずですが、今回は0~360[deg]に設定します(あくまでモデルなので)。
関節間の距離は12[cm]、また、角変位45[deg]のオフセット関節として回転軸の方向ベクトルを定義すると構造データは以下のようになります。

図1 ロボットアームの構造データ「a45.dat」
文法は既存のシミュレーションソフトの形式で書かれています。今回は研究室のシミュレーションソフトで計算を行うので。みんなは覚えても意味ないよ。
2.計算
先駆者の作りしシミュレーションソフトを使い、角変位を15[deg]ずつ変化させた際の座標をすべて計算してもらいます。
24*24*24*24=331776
がんばれPC君。
これにより以下のような座標データのファイルが出力されます。
図2 1点目の座標データ「1」
これが331776個作成されます。
図3 1000点目の座標データ「1000」
図4 10000点目の座標データ「10000」
図5 100000点目の座標データ「100000」
3.まとめ
今回はデータを出力するところまで。次回はPythonなど使ってデータを処理していこうと思います。331667個のデータをね。
最後に今回使用したシェルスクリプトのデータを貼ります。でもシミュレーションソフト固有のコマンドが入っているのでみなさんは使えないかと思います。あしからず。
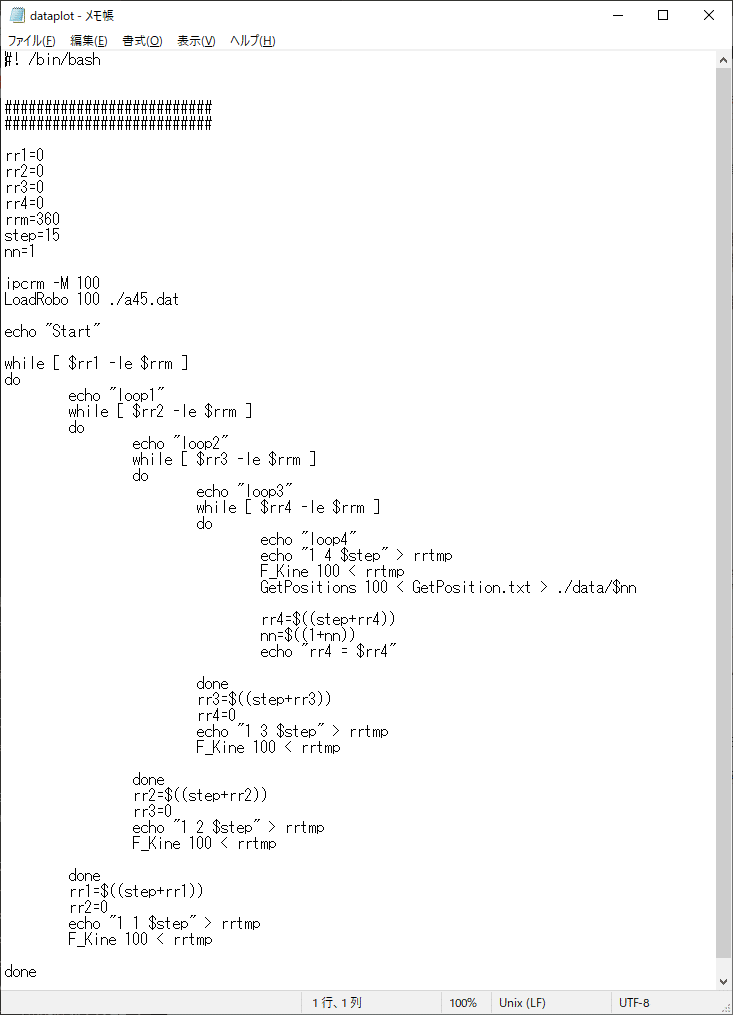
図6 計算に使用したシェルスクリプトファイル「dataplot.sh」
この記事が気に入ったらサポートをしてみませんか?