
カムロボにマイコンロボットの基本機能を実装する

カムプログラムロボット工作セット(以下,カムロボ)を改造してマイコンロボットにすべく,まずは基本的な機能を実装しました.
基本的な機能・要素
まずはマイコンロボットの最も基本的な機能を実現するため,下記をまとめたプリント基板を作りました.
・制御用マイコン
・モータ駆動回路(モータドライバ)
・電源回路
・タッチセンサ(バンパー)
もうちょっと機能があるのですが,それはまた今度紹介したいと思います.

マイコン
マイコンロボットをプログラムで制御するためのマイコンです.
今回はMicrochip社の8bit AVR ATmega328にしました.このマイコンはArduino UNOやProなどに使われているもので,Arduino IDEでもプログラミングが可能です.
モータドライバ
マイコンからの信号により2個のDCモータを駆動できます.東芝のTB6612FNGです.
電源回路
電池の電圧をマイコンやモータドライバで使用する5Vに変換します.電池はアルカリ乾電池(4本直列で6V)とニッケル水素電池(4本直列で4.8V)のどちらでも使えるように昇降圧型のスイッチング電源モジュールを使用しています.(秋月電子通商AE-LTC3111)
タッチセンサ(バンパー)
ロボットが何かに接触(衝突)したときにそれを検知するためのセンサ(スイッチ)です.
ぶつかったときにスイッチを押すだけの単純な仕組みなのですが,ロボットに実装するときどうやって取り付けるか,確実にスイッチを押せるかなど意外に設計がめんどくさい部分です.そこで今回は基板に直接つけてしまうことにしました.
基板に何か呼び名がないと不便なので,マイコンロボットの基盤となる基板ということで「ベース基板」と名付けようと思います.
このベース基板をカムロボの車体にスペーサとネジ取り付けます.穴の位置はカムロボに合わせてあるので穴あけ作業は不要です.
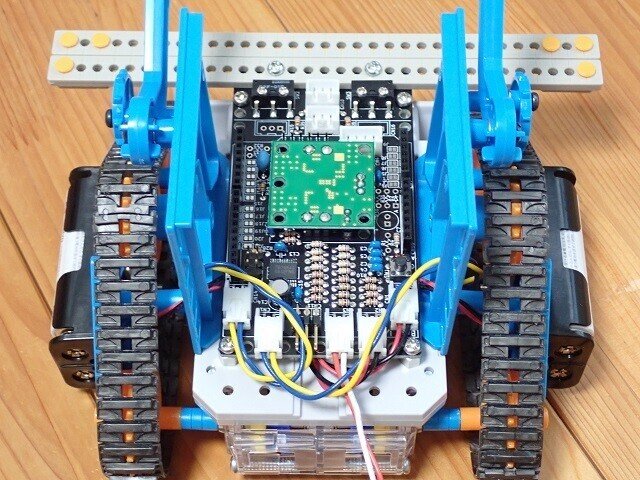
まとめ
これでひとまずマイコン搭載プログラミングロボットの出来上がりです.
簡単なプログラムで動かしてみた様子がこちら.壁にぶつかると向きを変えて進みます.