
カーコラム「NISSAN BNR32 SKYLINE GT-R 備忘録 Part.6」

BNR32型GT-Rに搭載されるRB26DETTエンジンが搾り出すパワーをフルに活かし切るためには優れたサスペンションの存在は不可欠だが、それにも増して重要なのが駆動力の適正分配である。
パワーが上がれば上がるほど後輪(あるいは前輪)のみに駆動力がかかる2WDでは駆動ロスが大きくなる。ましてや、最大出力が300PSに迫ろうというエンジンと搭載するハイパワーマシンでは尚更である。
その問題を解決するため、BNR32型GT-Rでは日産が独自に開発した4WDシステム " ATTESA ET-S " が採用された。
このシステムは、オートマチック・トランスミッションの構造を応用したトランスファーによりトルクスプリットを連続的に制御するもので、制御はクルマの各部に取り付けられた各種センサーからの情報を基に専用のコンピューターが行う。
BNR32型GT-Rの場合、平常走行時はFRだが、低μ路などでリヤタイヤが空転した時、あるいはハードコーナリングでリヤタイヤがグリップを失い、横Gが一気に抜けてテールが振り出してしまった場合などには自動的に駆動力が前輪へと伝達される。
このトルクスプリットが最大で50:50まで行われ、その駆動配分の比率はすべてコンピューターにより決められる。

この4WDシステムの採用については、シャシー設計部内でも長時間の議論が交わされた。その議論の争点は、果たして4WDが人間の感性にマッチするか否かという問題であった。
しかし、市販レベルの300PS程度では2WDでも充分なトルク伝達は可能だが、レース仕様での最高出力である600PSを想定した場合には4WD化は必要不可欠な要素であった。
ハンドリング性能とトラクション性能を如何に両立させるか? 開発チームは白熱した議論を重ねた。
そして、様々な4WD車を比較検討した結果、駆動方式の基本は飽くまでもFRで、前後輪の駆動配分を走行状況に応じて電子制御するトルクスプリット型お4WDシステムの導入される事となった。
すでに解説したように、そのシステムはオートマチック・トランスミッションの構造からヒントを得て開発されたもので、湿式多板クラッチによる連続した滑りの制御によりトルク伝達を行うものだ。

このシステムの要と言えるコントロールユニットには、日産社内で電気自動車の実験を手がける研究グループが開発中だったテクノロジーが採用された。
実はこのシステムこそ、1985年の東京モーターショーに参考出品されたコンセプトカー " CUE-X " に搭載されたニューテクノロジー " E-TS " である。
BNR32型GT-Rに採用されたATTESA E-TSのメカニカルレイアウトを簡単に説明すると、まず縦置きに搭載されるRB26DETTエンジンのトランスミッション右側にトランスファー(湿式多板クラッチ機構内蔵)を設置し、後輪へは一般的なFRと同じくセンタードライブシャフトによりトルク伝達を行う。
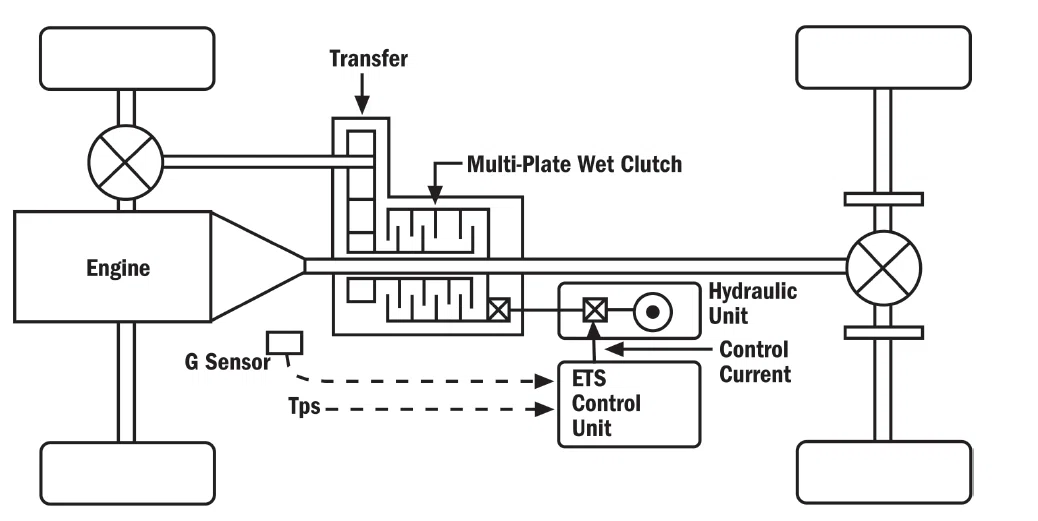
前輪を駆動するトルクは、アクチュエーター、ウィズドロワル・レバーを介してトランスファー内部の湿式多板クラッチ(7枚のドライブプレートと12枚のドリブン、そして2枚のリテーナープレートにより構成される)に伝達される。さらに、センター・ドライブシャフトに伝達され、チェーンより前輪用のスプロケット(フロント・ドライブシャフト)を回転させるというものだ。
つまり、前輪に伝達されるトルクの強弱は、湿式多板クラッチの押し付け荷重を変化させる事によりコントロールされるのである。
また、前輪のディファレンシャルは、エンジンのオイルパン右側に一体式で組み込まれているために、左側ドライブシャフト(前輪のドライブシャフトは左右不等長)はオイルパン内部を貫通するレイアウトとなっている。

因みに、フロント・ディファレンシャルは2ピニオンで4.111のファイナルレシオを持つF160型、リヤ・ディファレンシャルはトルク感応型LSDを内蔵するファイナルレシオ4.111のR200型がそれぞれ採用された。
ATTESA E-TSを制御するコントロールユニットは2つのマイクロコンピューターMCU1とMCU2を中心に構成され、MCU1は主としと後で解説する4WASの制御を行い、各車速センサーと前後の横Gセンサーからの信号を基にブレーキのアンチスキッド制御を担当している。
MCU2は、MCU1から送られてくる各車輪の回転速度信号や車速センサー(前後Gセンサーを基に測定)、それに横Gセンサー信号、スロットル開度センサー信号、エンジン回転計信号などの入力を基に、油圧ユニットの比例電磁減圧弁のソレノイド電流値をアナログ制御している。
MCU1とMCU2は相互通信を行っており、E-TSと4WASを総合制御している。
いいなと思ったら応援しよう!
