
【取材レポート】隠れた鹿をドローンで探せ! 鹿検知コンペティション in INA Vally 2017

本稿は『けもの道 2018春号』(2018年4月刊)に掲載された記事を note 向けに編集したものです。掲載内容は刊行当時のものとなっております。あらかじめご了承ください。
鹿検知コンペティションとは?
鹿検知コンペティション(以下「コンペ」)とは、2017年10月18日から21日まで長野県伊那市で行われたドローンの一大イベント「ドローン・フェス」内で実施されたドローン競技(競技実施日は19、20日)だ。

近年、野生鳥獣対策の担い手が不足する中、無人自律飛行や空撮が可能で、さらに技術の発達により様々なカスタマイズが可能になったドローンを使うことで、効率的な野生鳥獣対策を目指そうという動きが活発になっている。
今回行われたコンペは、広く一般から参加者を募り、互いにその技術やアイデアを競うことで野生鳥獣対策、特に増え過ぎた鹿の対策に活用されるドローン技術や鹿の検出手法の向上を図ろうというもの。
決められたエリア内に配置された鹿ダミーの位置や数を、ドローンの自律飛行により探索、検知し、その早さや正確さを競うというもの。ドローンは山野に隠れる鹿を見つけられるのか?

鹿検知コンペティションのルール
指定エリア(約700m×200m)に設置した鹿ダミーを、ドローンを活用していかに正確に早く検知できるかを競う。
ドローンの飛行方法は、あらかじめ飛行ルートを設定して飛行させる自動航行(飛行時間は15分)。
検知の方法や使用する機器は自由(検知に使用するドローンは2機まで)。
鹿ダミーは、剥製を使用。胴体にハクキンカイロを巻き、周囲より高い温度を発する特徴を有する。
鹿ダミーは、一体ごとに大きさや形などが異なり、個体差がある。
得点は、鹿を検知した検知数、座標値(不正解はマイナスポイント)、解答提出までの時間(競技開始から検知データ解析までに掛かる時間)から採点。
入賞は3位までのほか、特別賞1チーム、全チームに参加賞が贈られる。

雨天となった初日
コンペには全国からの応募25団体から選出された14チームが参加し、結果発表まで含めコンペは3日間の日程で行われた。

一般社団法人日本UAS産業振興協議会の千田泰弘副理事長によれば「(日本国内で)ここまで大きなドローンのイベントは初めて」であり、主催である長野県伊那市を初め、参加者、大会関係者らの意気込みの大きさが伺える。
ところが競技初日は、あいにくの雨天となり、開会式は競技地近くの施設『ほりでいドーム』内で執り行われ、続けてルール説明と各チームのプレゼンテーションを披露することになった。
特に防水機能を備えていない通常のドローンは、配線などがむき出しの状態で非常に水に弱い。雨はもちろん、濃い霧などでも無理にフライトすれば機器に不具合を起こし墜落の可能性が高まったり、フライト後に配線などに錆びが発生しやすくなる。フライトが出来なければもちろん競技は開催できない。

鹿をドローンで検知することは難しい?
ドローンにサーモカメラを搭載して飛ばせば、すぐにでも鹿を見つけられるというわけではない。
「鹿をドローンで検知する」ということの中身は、ドローンを飛ばすことにより「それ(鹿)らしいものをどうにかして撮影すること」と、そこから「鹿のみを検出すること」に分けられる。
まずは熱源を探知したり、怪しい物体を可視光で確認したり「鹿らしいもの」を像として捉えなければならないが、そもそも「鹿らしいもの」を機械に判断させるプログラムは確立されていない。

次に撮影した画像から、その像が鹿か否かを判別しなければならない。何をもって「それは鹿だ」とするのか? 人の目に頼れば正確性の程度が不明な上に効率も悪い。かといって自動で行うためにはやはり何かしらの基準を定めてプログラムやアルゴリズムを新たに構築しなければならない。
天気に弄ばれた2日目
競技の初日にして、最終日となったコンペ2日目。
開催場所は標高1800mほどの鹿嶺高原。朝一番、雨はほぼ止んでいたものの、濃霧に巻かれてかなり視界が悪く、天候回復までまずは待機となった。
そして開始予定から約2時間遅れで霧が晴れ、第1組がフライトを開始した。




試されるドローン魂
ドローンは基本的に天候には勝てない。
再び鹿嶺高原が濃い霧に包まれると、今度は一向に晴れる気配が訪れない。主催者側からの待機指示に従い、天候回復のタイミングを待つが、参加者たちの間には重苦しい空気までもが流れ始める。
「もう中止でいいじゃないか」誰もがそう考えるほど霧が濃くなったところで、主催者側が参加者たちを集めて申し出たのは「ルール変更による競技再開」だった。
当初予定されていた3位までの入賞は無し。霧の中でも飛ぶという「志願チーム」を募り、検出方法や結果を個別に見て、伊那市長からの技術特別賞を1チームに贈るというものだ。ただし、墜落など不測の事態に対して主催者側は責任を負わない。

当初の入賞が無くなった以上、参加者にとって無理なフライトはリスク以外の何物でもないはずだった。
にもかかわらず、この後、果敢にフライトに挑んだ「TEAM MOREWELL(チーム モアウェル)」、「Team ArduPilotJAPAN(TAP-J)&エンルートM’s(現イームズロボティクス)」、「クイック&ロックガレージ」、「Lunopix.comと環境戦士見守朗のコラボチーム」の4チームが手を上げた理由は、「当たって砕けろ」という蛮勇からではない。
通常、ドローンを飛ばす開けた平地とは違い、コンペ会場である鹿嶺高原は高地で、多少の起伏のある山林が広がる。こういった場所でフライトする機会は少なく、フライトすること自体が貴重な経験とデータの積み上げになる。
また、山野では天候の急な変化はつきものであり、「霧が出たら即中止」という対応では自然を相手にドローンを飛ばせなくなってしまう。
今後のドローン技術の向上や発展のため、あえてリスクを受け入れた志願チームの「ドローン魂」には、大きな敬意を表したい。
写真で見る濃霧の中のフライトチャレンジ







必要なものは技術の発展と人材
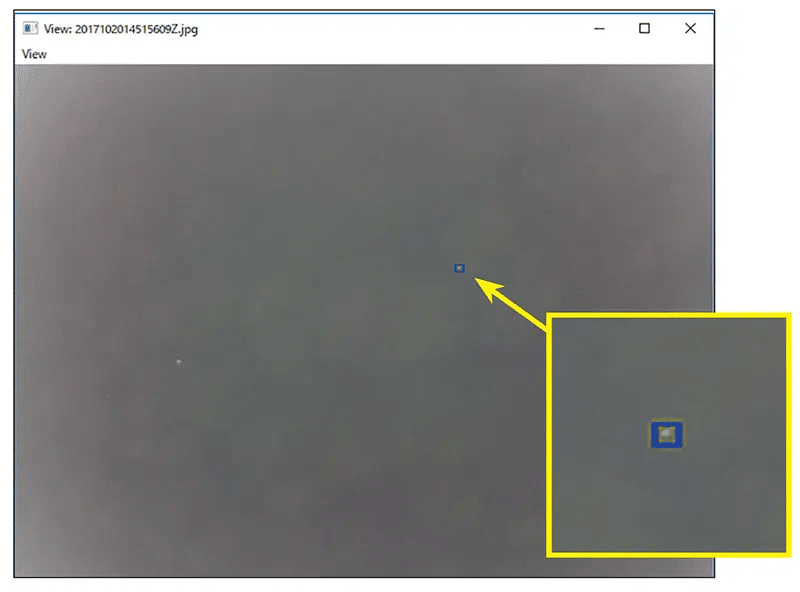
霧雨によって、木すらまともに分からない状況だったため、「画像の中にある白い点のようなものを、イチかバチか鹿として提出した」という TAP-J の山口さん。
コンペで求められていたものは、鹿を判別した画像ではなく、鹿の正確な座標値だ。
他のほとんどのチームは画像を撮影したドローンの位置情報が分かっても、撮影した画像に写る鹿の座標を算出することが困難だった。
その一方で TAP-J は、検出した物体の位置をほぼ正確に取得することができたのだが、「検出自体はプログラムが自動で行ってくれるのですが、それよりも戻って来て濡れているドローンを拭いたり乾かしたりする方を優先した」ために座標値の提出が遅れたという。
それでも結果として、「複数正解」「検出時間が短い」「誤差が小さい(誤差4.3m)」といった点がポイントとなり見事、特別賞の受賞となった。
「ほかに有力なチームもあった中で、総合的に考慮していただいた結果、賞をいただき、非常に光栄に思います」と喜びを口にする山口さんだが、実は普段は、プログラムのセキュリティの脆弱性を診断することなどを仕事にしているそうで、ドローンに関わることはまだ「趣味とか副業レベル」だという。
今後の鳥獣害対策でのドローンの活用については、技術の発展や新しいアイデアだけでなく、山口さんをはじめ、まだ隠れている有能な人材の本格参入が必要だ。
特別賞受賞チームの技術

本コンペで特別賞を受賞した Team ArduPilotJAPAN(TAP-J)&エンルートM’s(現イームズロボティクス)。チーム名にある「ArduPilot(アルジュパイロット)」とは Ardupilot.org が提供するオープンフライトコントロールソースのことだ。世界中の技術者たちがコミュニティに参加し、日々開発が続けられている。
そして今回の鹿検知コンペティションで入賞を果たした「TeamArduPilot JAPAN(TAP-J)」は ArduPilot に可能性を感じた日本国内の有志の集まりだ。
元々はコンペと同じ週に北海道で開催されている「Japan innovation challenge 2017(※)」への出場を目指したチームであり、同じ技術が利用できると考えメンバーの中から村田勝利さん(上記写真内中央)と山口達也さん(上記写真内左)がコンペに参戦した。
※Japan innovation challenge 2017:2017年10月16日から5日間に渡って北海道で行われた「ロボットによる山での遭難救助」を課題としたロボット関連技術を競うイベント。

シカの検知方法と解析方法
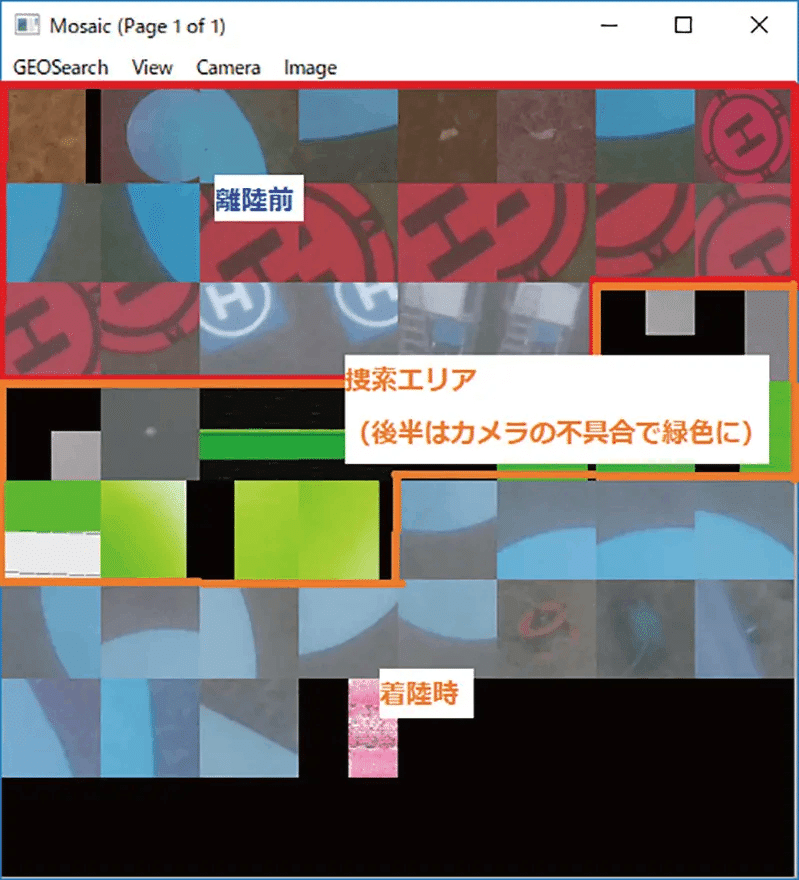
TAP-J が使用した鹿検出用のツールは、オープンソースである「CanberraUAV Image Processing(cuav)」を使用。ArduPilot の開発メンバーがオーストラリアで開催される捜索救難コンテスト用に作ったもので、コンペではドローンで上空から撮影した画像を元に地面と異なる物体の検出を試みた。
《cuavの特徴》
大量の画像データの中から、物体(人や動物など)を抽出。
検出した物体の位置を画像から算出し、座標で表示。
モデルの準備や学習は不要(ディープラーニングではない)。
ドローンの飛行中にリアルタイムで解析をするオンライン解析と、保存された画像データから解析するオフライン解析が可能。
オンライン解析の場合、地上局に送信するデータを最小限にして通信量を下げる。



(了)
狩猟専門誌『けもの道 2018春号』では本稿を含む、狩猟関連情報をお読みいただけます。note版には未掲載の記事もありますので、ご興味のある方はぜひチェックしていただければと思います。
ここから先は

けもの道 04[2018春]
狩猟専門誌『けもの道』の2018春号の有料記事をまとめてお得に読めるマガジンです。特集テーマは「猟犬と歩く。その先にある光景」。伝統の宮古…
この記事が気に入ったらサポートをしてみませんか?