
ラズベリーパイWiFiビデオロボットを動かしてみた!~組み立て編~

はじめに
ラズベリーパイを使ったWiFiビデオロボットの工作キットを入手し、組み立てたのでその流れを記事にしました。
1.ロボット本体の組立
まずはモーターの取り付け、金属部分の組立を行いました。説明書通り、ねじとナットを使用して組み立てました。


2.キャタピラーの取り付け
次にタイヤ、キャタピラーの取り付けを行いました。こちらも、説明書通りにねじとプラスチック部品を取り付けることでできました。


3.搭載する部品の組立
本体の大枠が出来たので、搭載する部品の組み立てに移りました。まずはラズベリーパイとマザーボードを組み立てました。ラズパイの上にマザーボードをはめ込み、ナイロンコラムをねじ代わりにして固定しました。

次に、カメラ部分の組立を行いました。下の台座の爪にカメラの台座を組み合わせることでできました。

4.部品を搭載
部品の組み立てが終わったので、本体に取り付けていきます。まずはロボット内に部品を取り付けます。バッテリーはマジックテープで取り外しが出来るように載せ、赤外線センサーは本体についている黒いねじをいったん外し、挟み込んで再度ねじを締めることで取り付けられました。

次にロボットの上に搭載する部品を取り付けます。本体の金属板に入っているスリットに、ねじとナットを使って取り付けました。

5.配線をつなぐ
ここまで組み立て終わったら、最後に配線をつなぎます。
カメラのUSBプラグは画像9左側の下に差し込み、バッテリーのプラグは右上に差します。モーターの導線は左上の箇所のねじを緩め、導線を入れてねじを締めることでつなぐことができます。

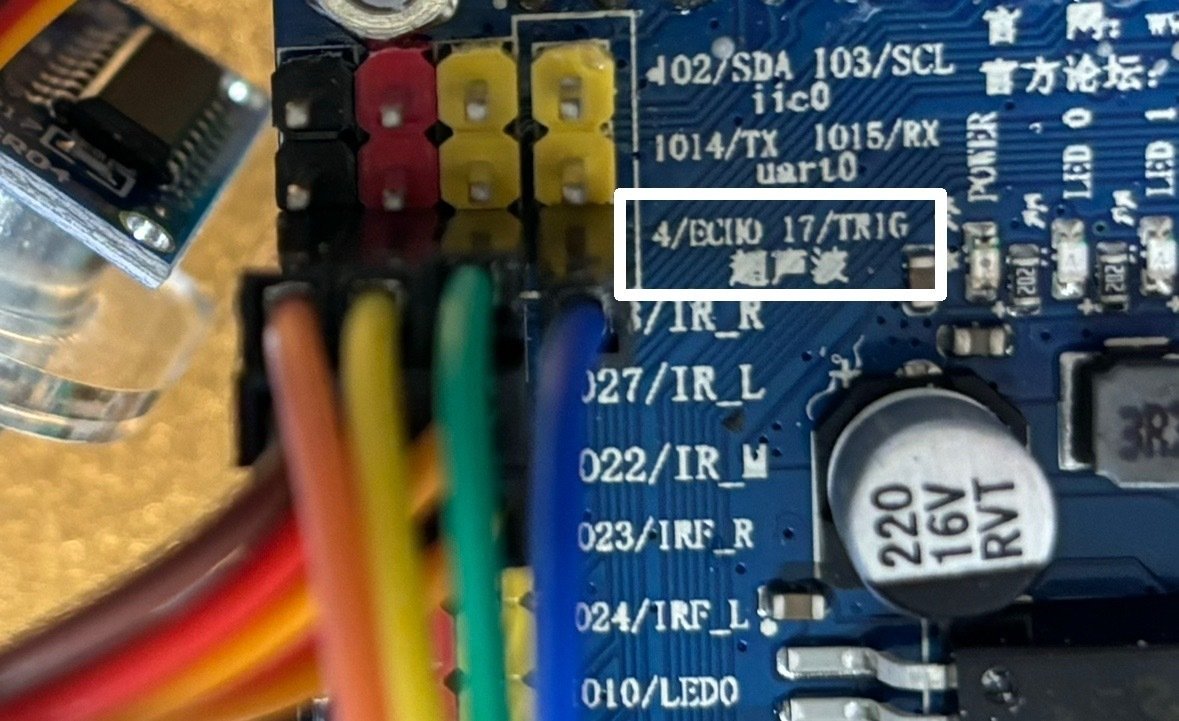
次にカメラ、アーム、赤外線センサー、障害物回避センサーの配線をつないでいきます。つなぐ場所は次の画像の通りです。


最後に
以上の流れで説明書通りにロボットを組み立ててきましたが、実際組み立ててみると順番を逆にした方が良い工程があったのでその順番をメモしておきます。
カメラの組立
タイヤ、モーター、赤外線センサー、アーム、ラズパイ、障害物回避センサー、カメラを本体のボードに取り付ける(ボードの裏表に気を付ける)
本体を組み立てる
キャタピラーを取り付ける
本体に取り付けてあるラズパイの上にマザーボードを取り付ける
バッテリーを取り付ける
配線をつなぐ
上記の順番で組み立てると、一度組み立てた部分を解体して取り付けるという手間の重複を抑えられると思います。本体の組立よりも先に搭載物を取り付けるため、本体のボードの表裏に注意して取り付ける必要がありそうです。
開発部分についてはまだ取り掛かっていないため、これからどのようにしてロボットが動くのか楽しみです!!