
山におけるドローン自動操縦の設定方法

こんにちは。
粛々と未来の山を創る最強戦力こと、齋藤です。
私はドローン(ファントム4Pro)を用いた空撮業務を担当しているのですが、山における自動操縦の設定方法には他にどんなやり方があるのだろうと疑問に思い、ネットで検索してみました。
結果、LITCHI(ライチ)とMission Plannerを使った設定方法ぐらいしかヒットせず、どの説明量も多くて、読んでいるだけで頭が痛くなってしまいました。
そこで、ふと自分が普段何気なく使っているQGISとLITCHIを組み合わせた設定方法が一番簡単なのではないかと思ったので、参考の一例としてご紹介します。
この設定方法は、弊社の提携会社である森林計測・解析を専門に事業を展開されておられる株式会社Forest Eyeさんに教えていただいたものです。(株式会社Forest Eyeホームページ https://www.foresteye.co.jp/)
なるべく読みやすいよう、簡潔にまとめました。
ステップ1. QGISでドローンが飛行するラインを決める
まずQGISを起動して地形レイヤを表示させます。材料が何もなければプラグインのMapTilerをインストールして、地理院色別標高図と地理院標準地図を重ね合わせることでも代用できます(標高図は混合モードを「乗算」にします)。
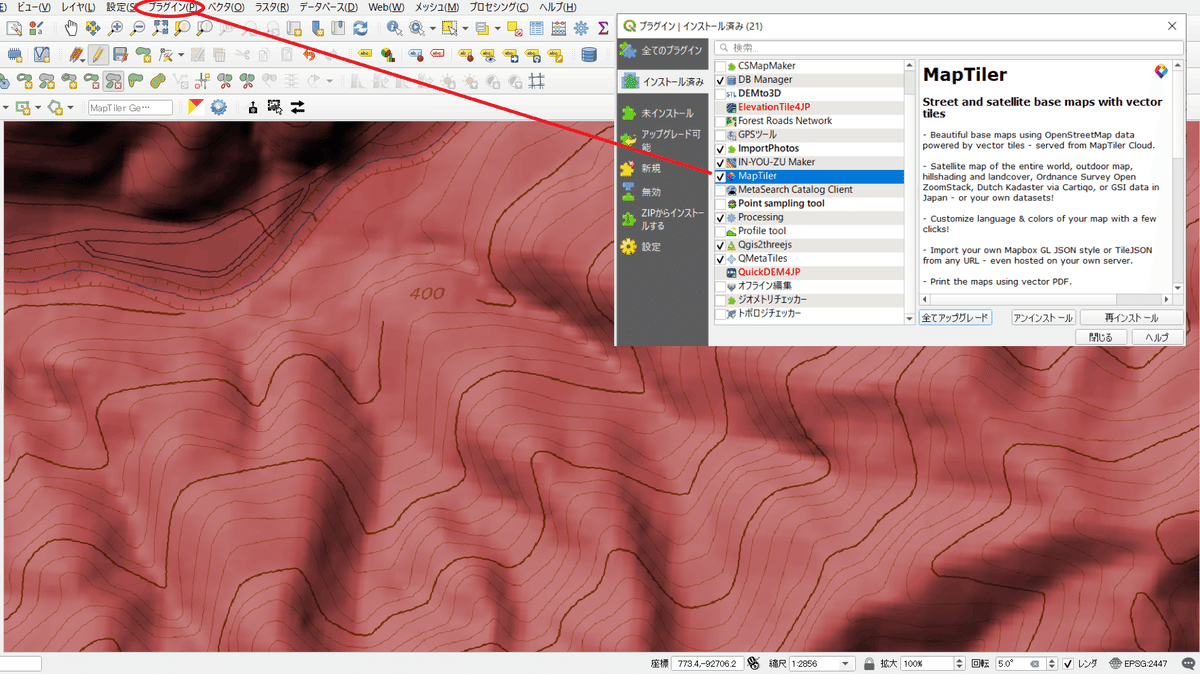
私の場合は、西粟倉村が保有している赤色立体図を使用しています。
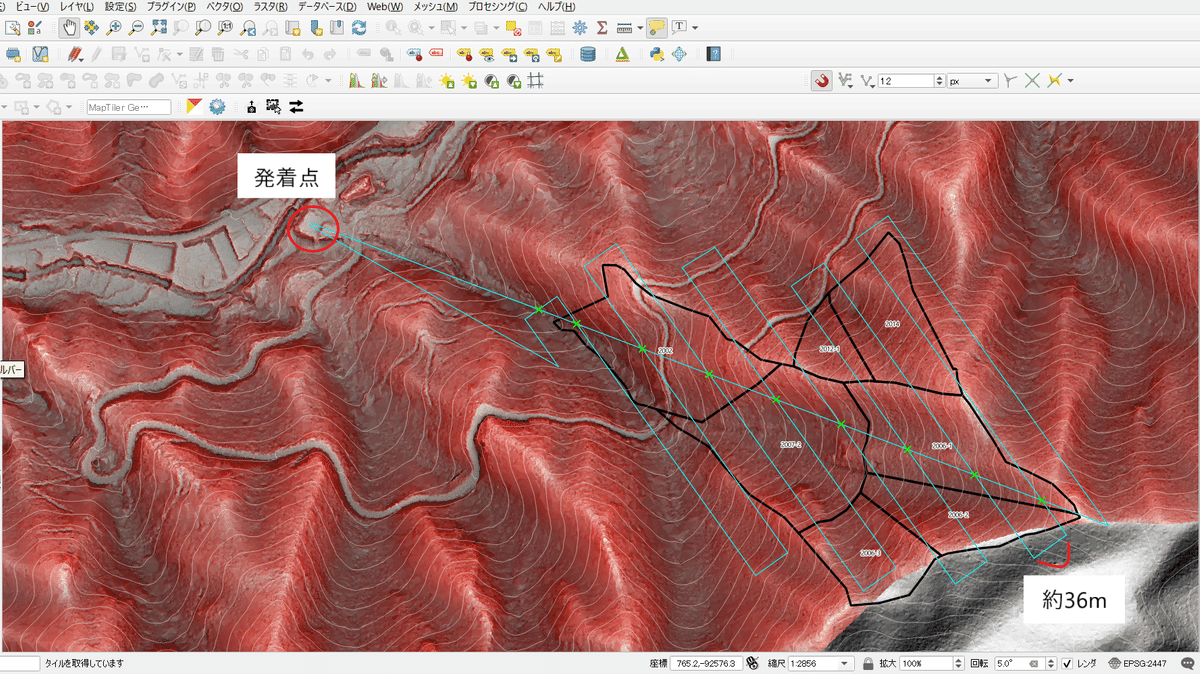
次に撮影範囲とドローンの発着点を決めます。なるべくオープンスカイな場所が良いと思います。ラインシェープレイヤを追加し、高度なデジタイズツールを有効にしてから、撮影範囲全域を覆うイメージで飛行ラインは平行、折り返しは幅を約36m設けて直角に作図していきます。
QGISのダウンロードはこちらから https://qgis.org/ja/site/forusers/download.html
ステップ2. 飛行ラインに沿ってWay Pointを設定する
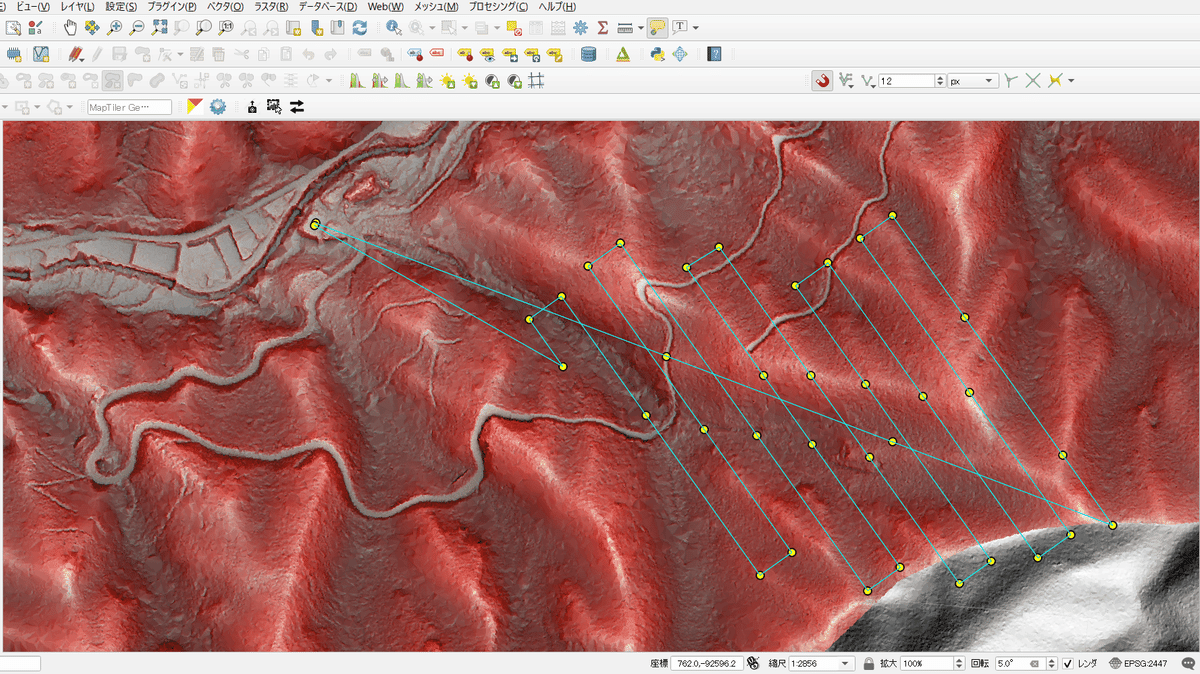
ポイントシェープレイヤを追加し、スナップを有効にしてから作図した飛行ラインに沿ってWay Pointとなるポイントシェープレイヤを順に追加していきます。この時、山の起伏に合わせて設定することが非常に重要です。基本的には尾根・谷部でポイントを置くイメージで大丈夫だと思います。必ず発着点からスタートして発着点に戻るよう設定してください。ポイントとポイントの離れ過ぎにも注意が必要です。
ステップ3. ポイントシェープレイヤをKMLファイルに変換してLITCHIにインポートする
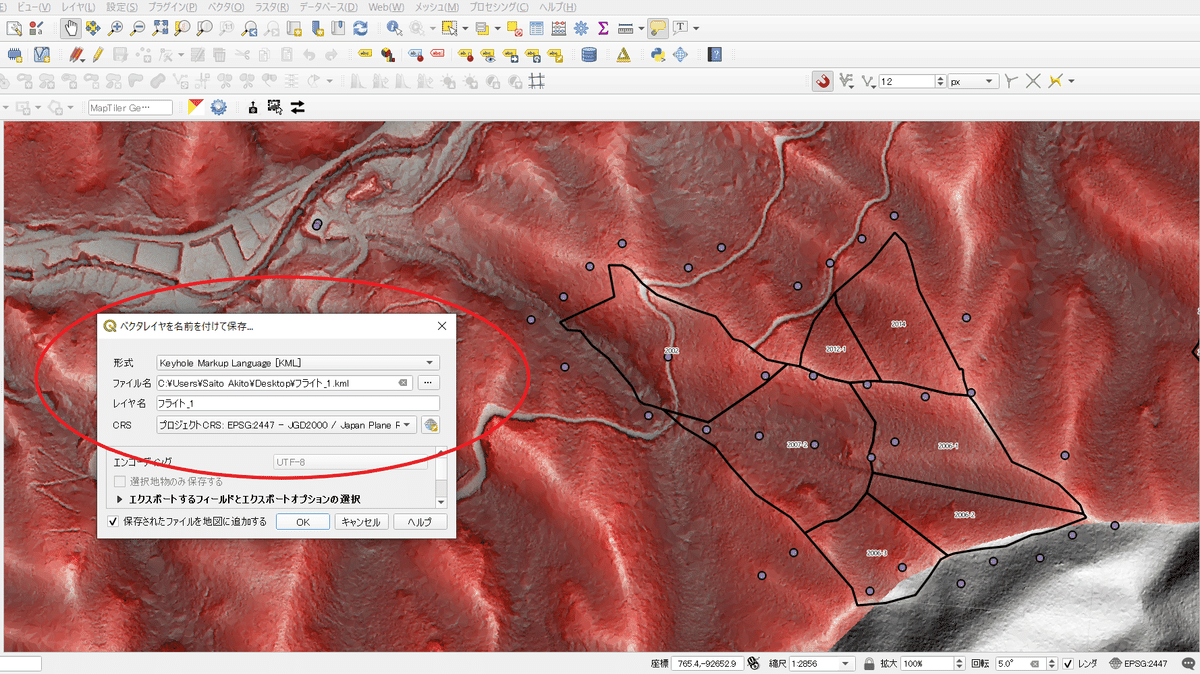
Way Pointとなるポイントシェープレイヤを追加し終わったら、形式をKMLに指定して保存します。
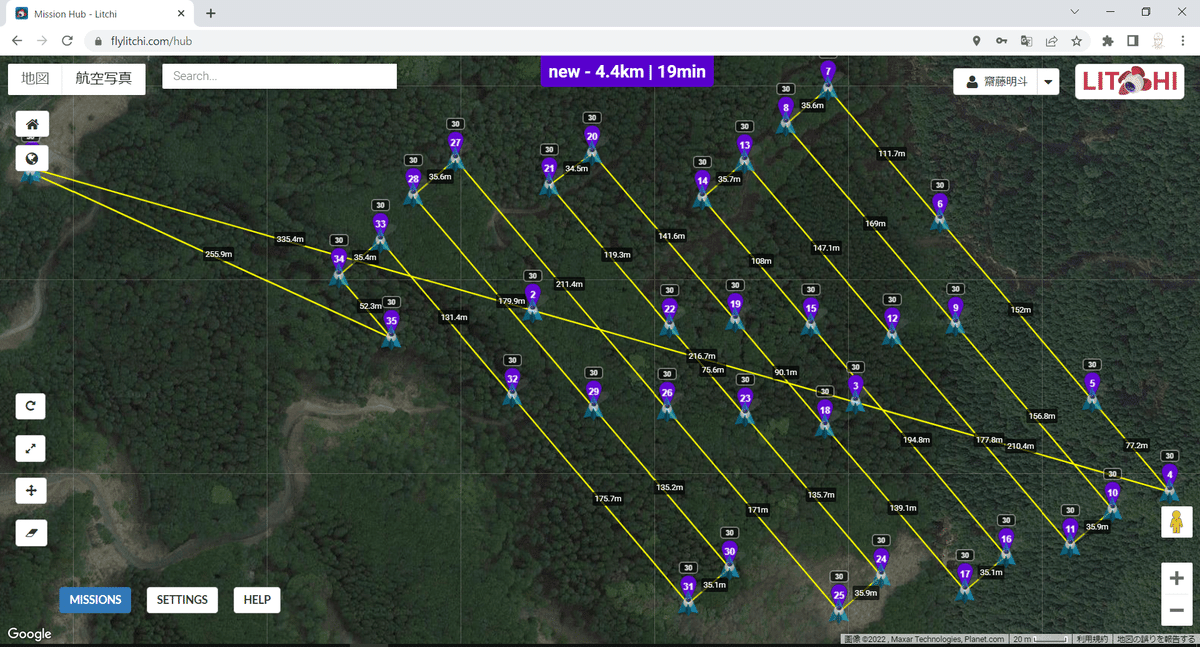
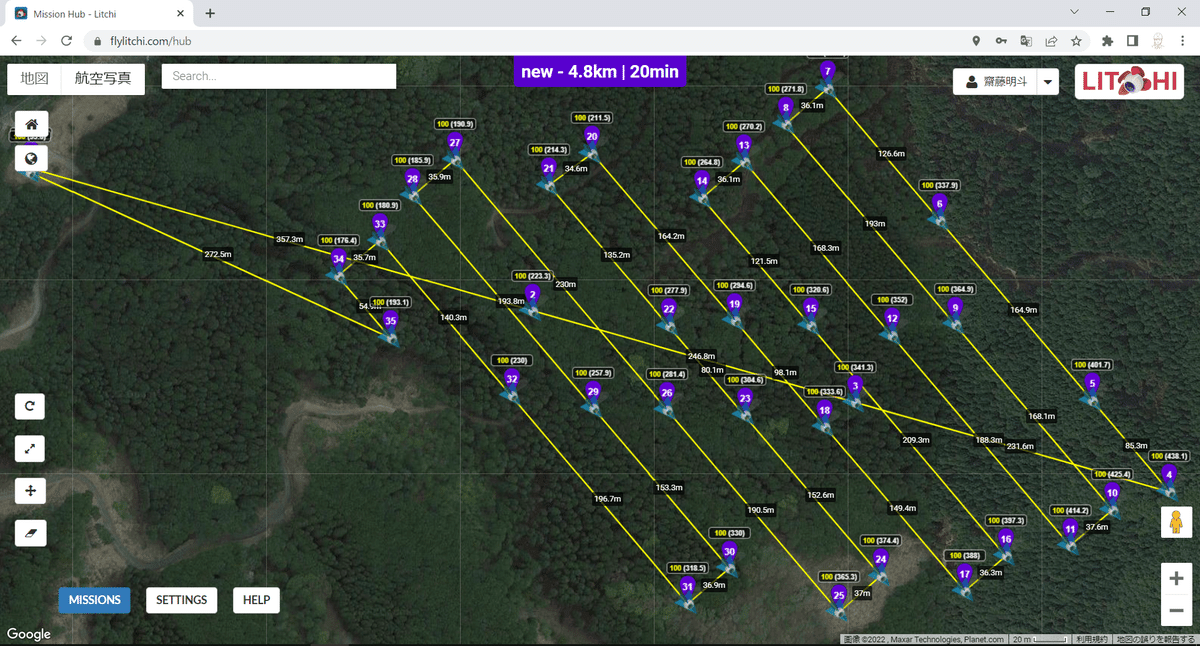
KMLに変換できたらLITCHIを起動し、Mission HubにKMLファイルをインポートすると、QGISで作成した飛行ルートが表示されます。
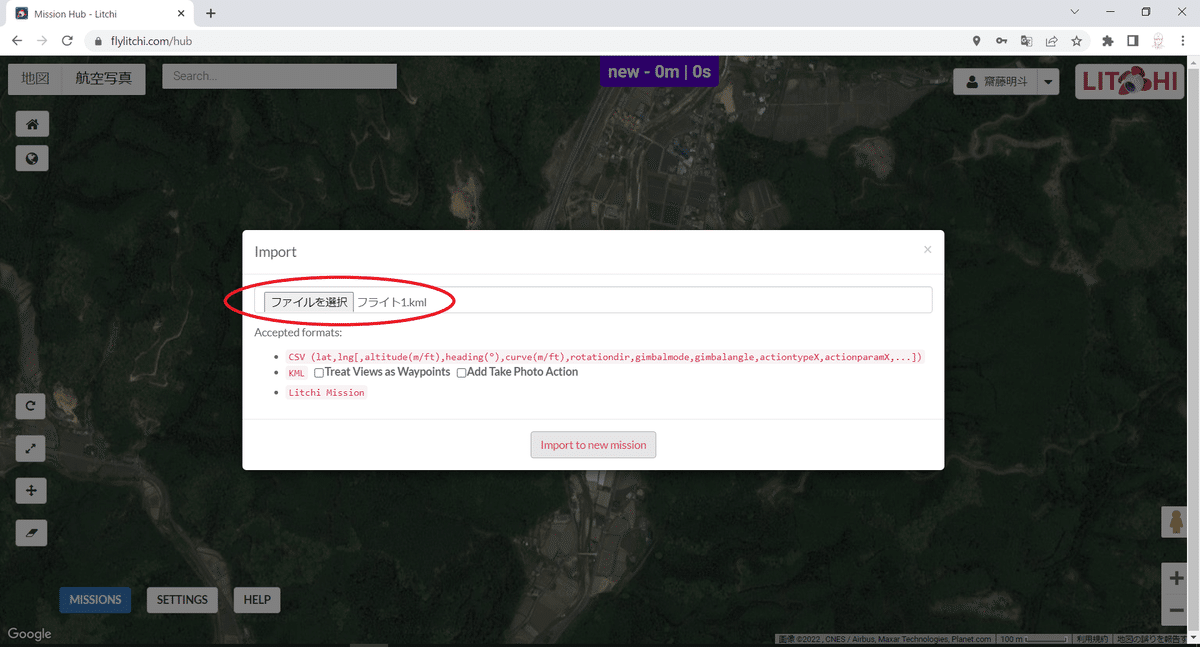
(LITCHI for DJI Dronesアプリ(有料) https://flylitchi.com/)
ステップ4. LITCHIにインポートされたWay Pointを一括変更する
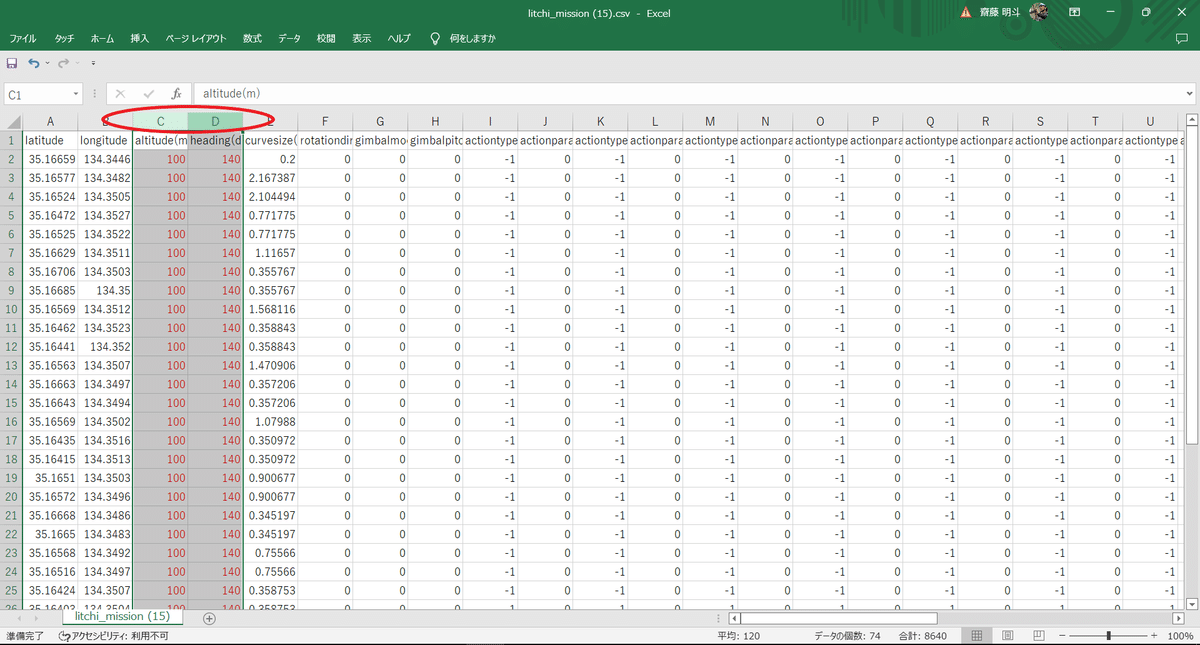
Way Pointの初期設定は、Altitude(高度)が30m、Heading(機首方位)が0度になっているので、Way Pointをどれか一つ選択し、Headingの向きを線と平行になるよう調節します。調節できたらMISSIONSからExport as CSVを選択し、作成されたCSVファイルを開きます。
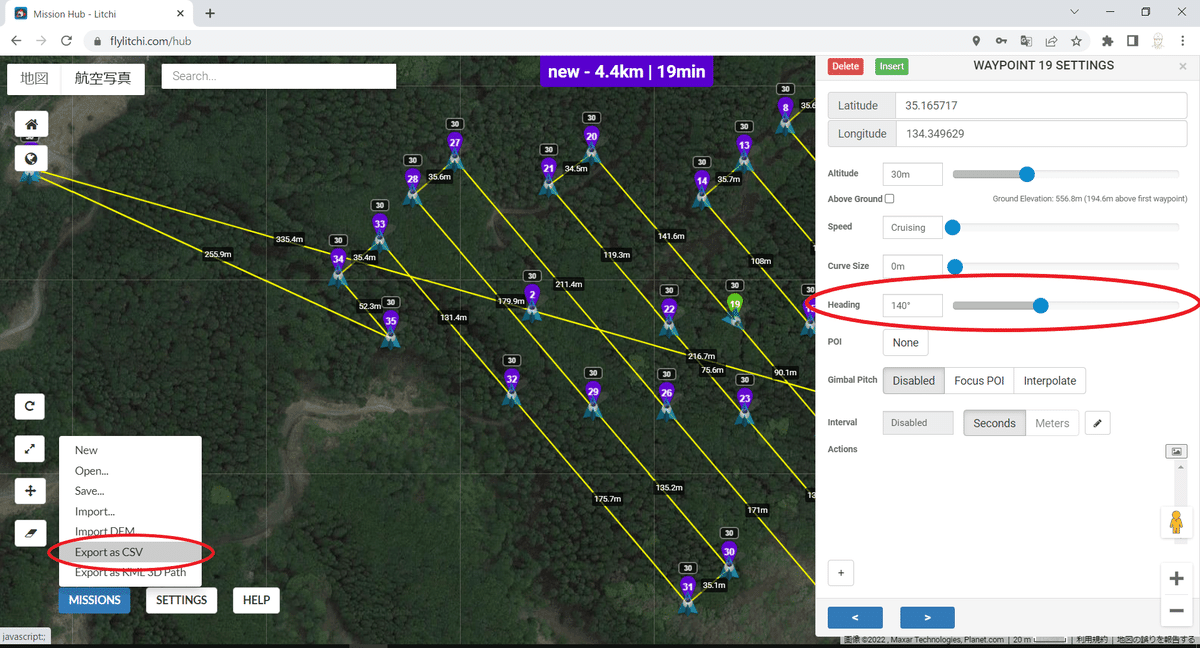
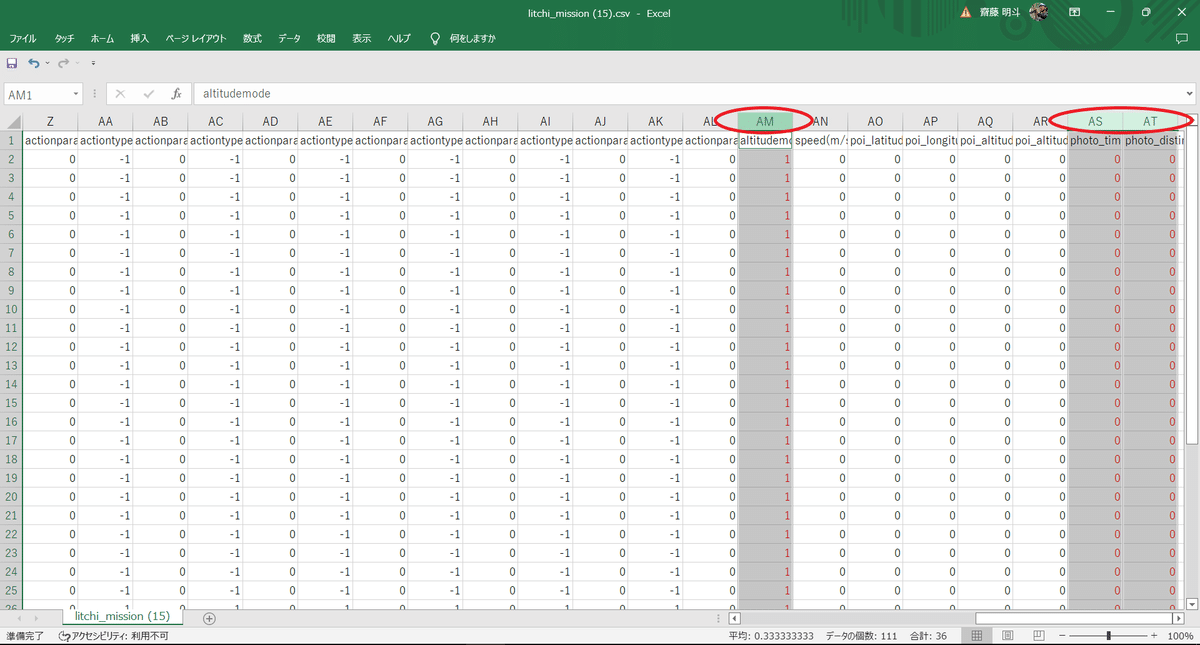
CSVファイルを開いたら、C列(altitude)を100に、D列(heading)を調節した数値に、AM列(altitude mode)を1に、AS列・AT列(photo_)を0に変更して保存します。
保存したCSVファイルを再びLITCHIにインポートすると、Way Pointが一括変更されます。この時、すべてのWay Pointの機首方位が平行に揃っていることと対地高度が100になっていることを確認します。
ステップ5. 最終確認してフライトプランを保存する
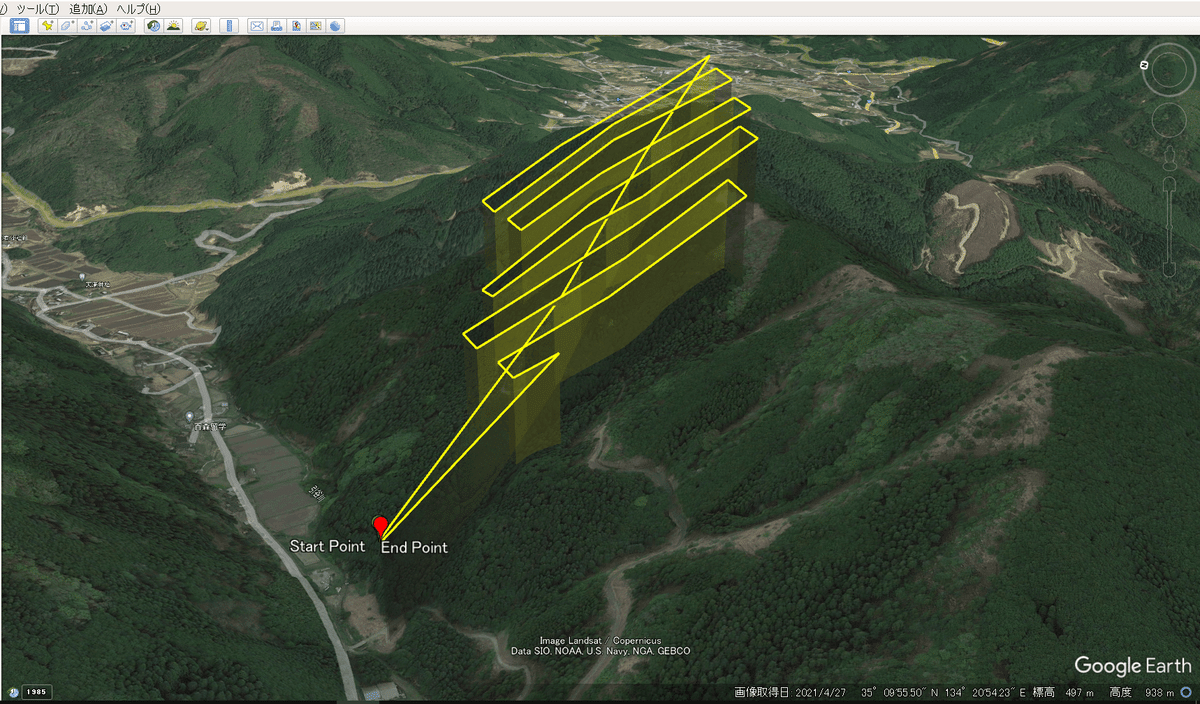
最後に、作成したフライトプランを確認します。フライト時間は長くても20分以内にしておいた方が無難でしょう。MISSIONSからExport as KML 3D Pathを選択し、Google Earthで全体像を立体的にチェックします。飛行ルート上で障害物や立木に当たらないかをいろいろな角度からしっかり確認します。
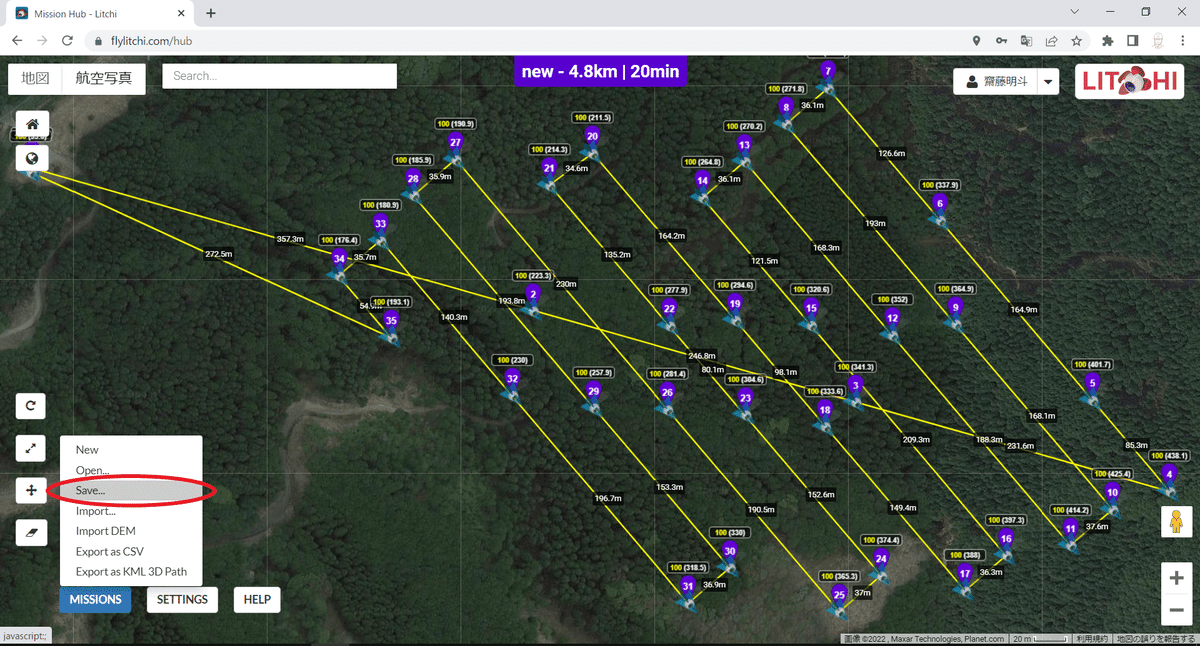
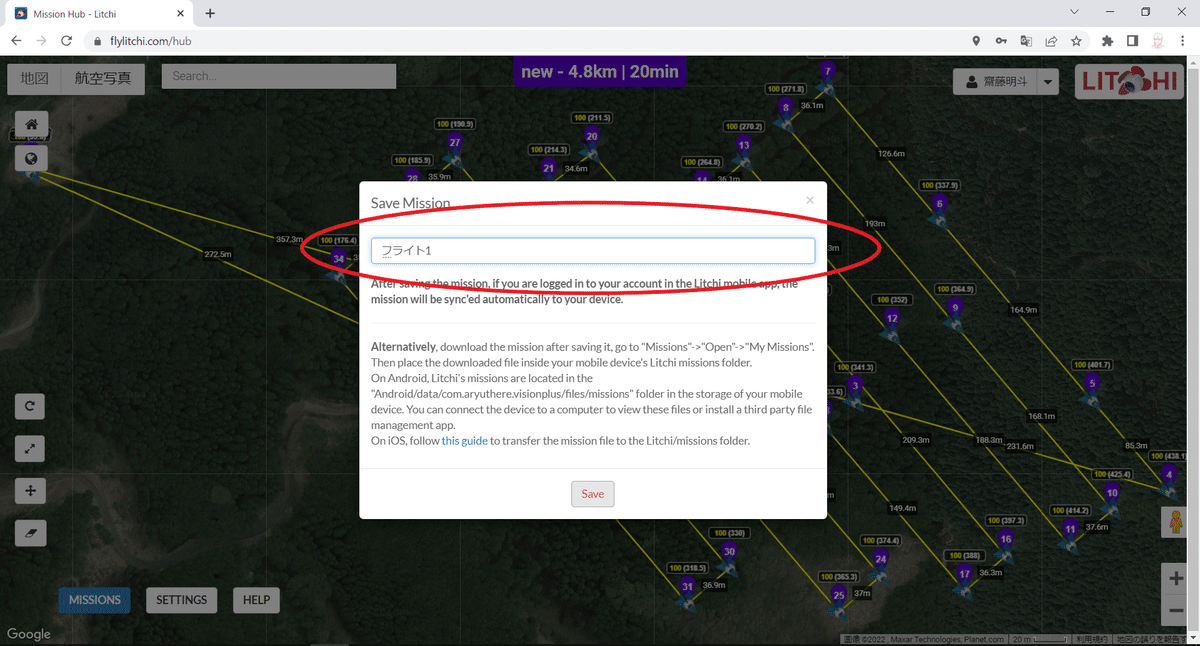
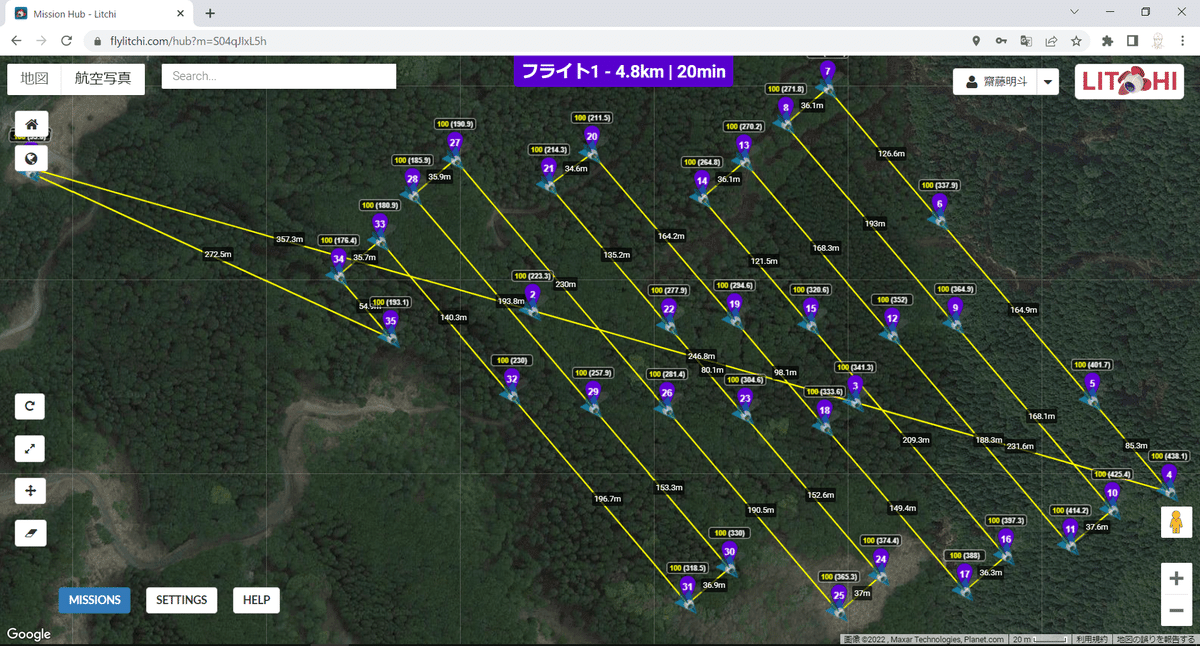
最終確認が終われば、MISSIONSからSaveを選択し、名前を付けてフライトプランを保存して完了です。
いかがだったでしょうか。
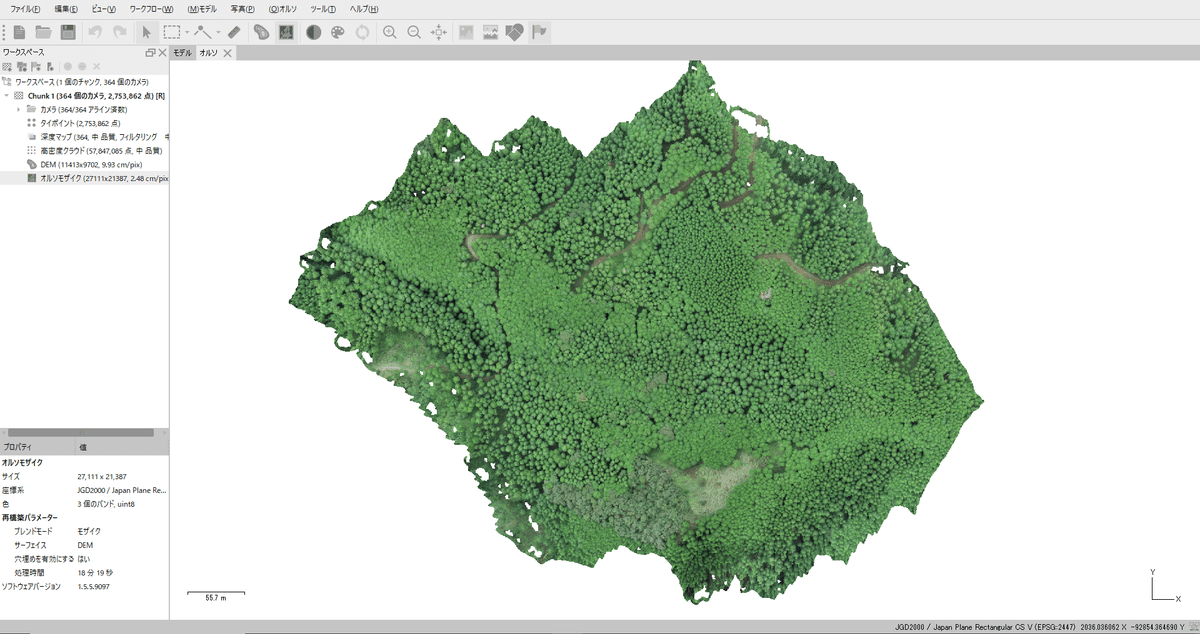
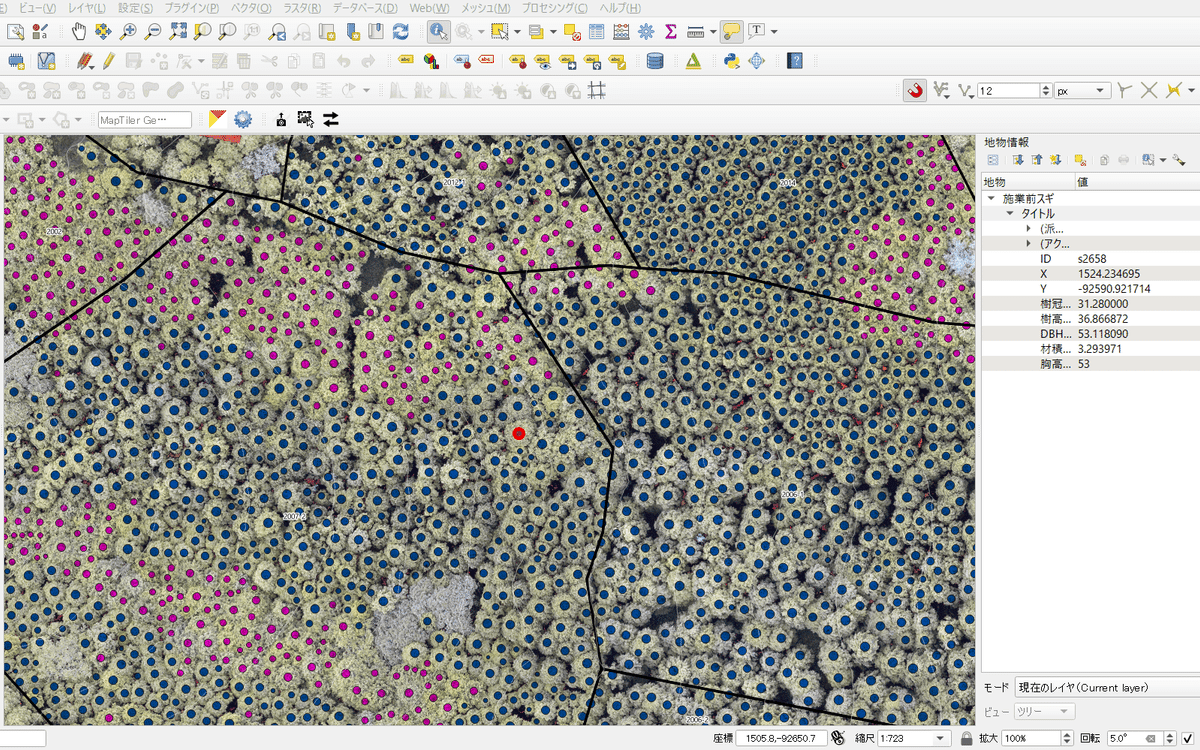
このフライトプランで撮影した画像を3D空間データ生成ソフトでスキャンすると、一枚の画像データが出来上がります。この画像データを解析することで立木一本一本の樹種、樹高、胸高直径、材積などの計測が可能です。
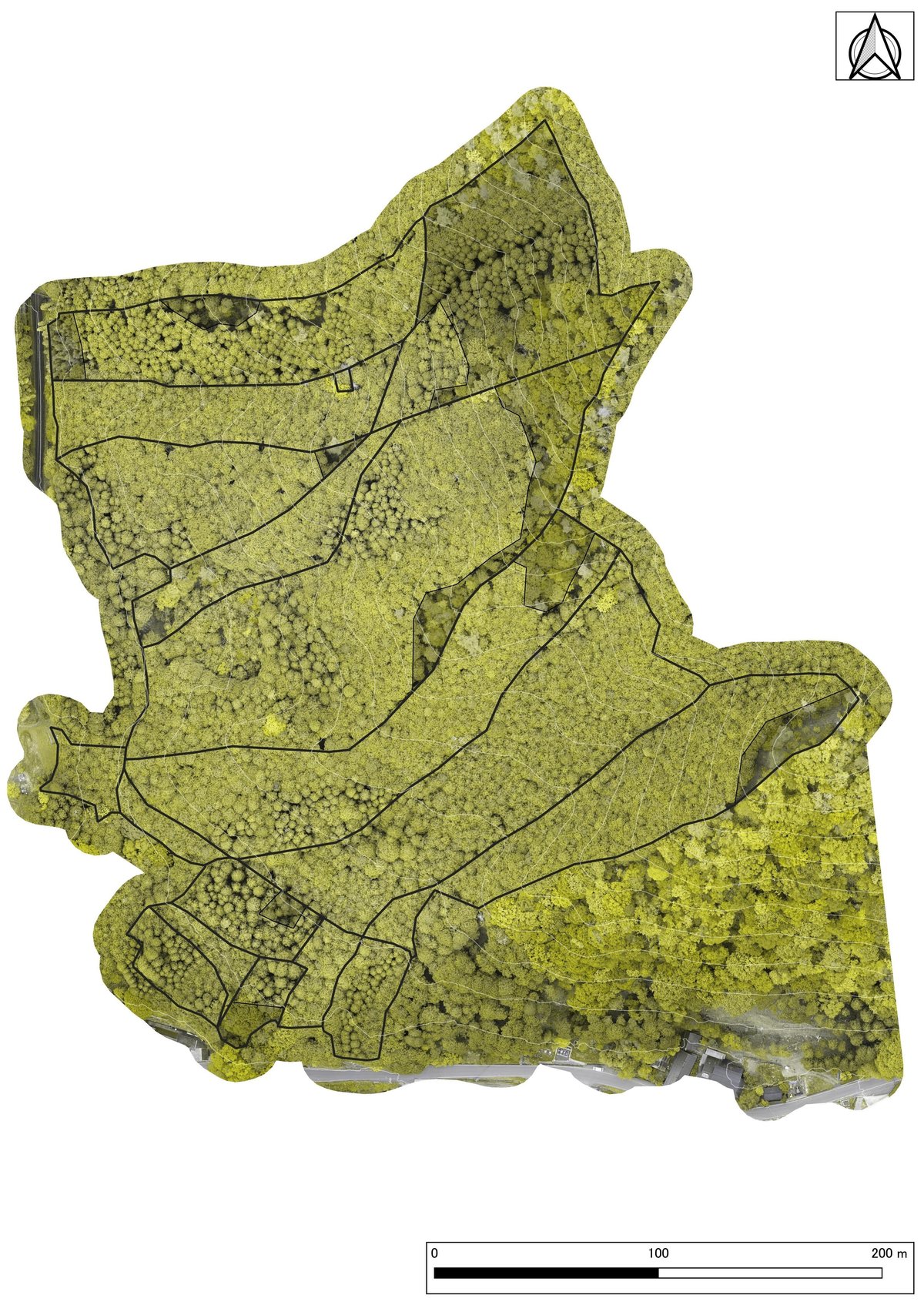
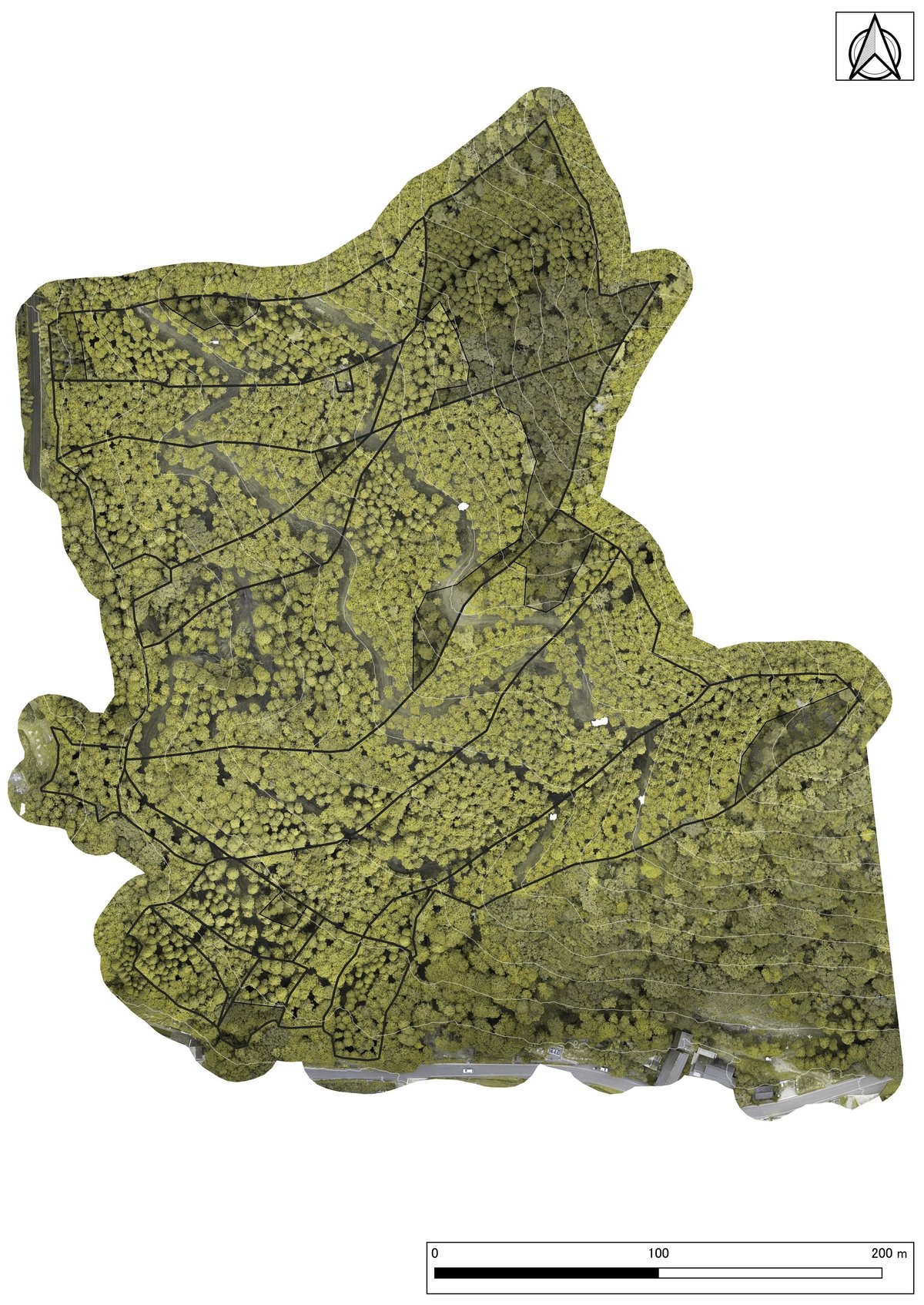
私は施業団地の設計に着手する際、事前に空撮を実施して森林の現状をしっかりと把握した上で山の踏査に入るようにしています。そうすることで調査・設計業務が効率よく進むようになりました。また、間伐する前と後でドローンを飛ばして間伐の仕上がり具合や、作業道の線形などが実際の設計通り実施できたか俯瞰でチェックすることで、さまざまなフィードバックを得ることができます。
近年では林業界でもドローンが普及してきており、空撮目的だけでなく、測量や苗木の運搬などもできるようになってきました。このまま行けば、伐った立木を山から吊って麓に降ろしてくるドローン集材も、そう遠くない未来に実現するかもしれませんね。