
歩行訓練ロボットの設計(その6)-システム設計-

前書き
この記事は、歩行訓練ロボットのシステム設計仕様書です。この仕様書は、ChatGPTが作成した、GTR(歩行障害のある患者に理学療法士指導のもと歩行訓練を提供するために設計されたロボット)の英語版システム仕様書を流用しています。流用部分は、ChatGPTが作成したシステム設計仕様書の構成とコンテンツです。GTRと作者が検討している歩行訓練ロボットの仕様は異なるため、多くの箇所を編集しました。ChatGPTが提示した章構成に含まれるテストとメンテナンスについては、当初、削除予定でしたが、テストとメンテナンスを考慮してシステム設計をする必要があると思われるため、そのままにしています。
この仕様は、コンセプト、要件定義との整合が完全に終了していないため、今後変更が入ると思います。変更内容については履歴に記載していきます。
序章
このドキュメントの目的は、歩行訓練ロボットのシステム設計仕様を提供することです。歩行訓練ロボットは、歩行障害のある患者または歩行機能が低下した高齢者に歩行訓練を提供するように設計されています。このドキュメントでは、歩行訓練ロボットの機能仕様とシステムアーキテクチャ仕様について説明します。
目的
歩行訓練ロボットを設計、開発、製造販売する目的は、歩行障害のある患者または高齢者に安全かつ効果的な歩行訓練を提供することです。この歩行訓練ロボットは、歩行障害のある患者または歩行機能が低下した高齢者に歩行訓練の機会を提供し、その結果をフィードバックして彼らの歩行を改善するように設計されています。
用語の定義
歩行訓練ロボット: 歩行障害のある患者または歩行機能が低下した高齢者に歩行訓練を提供するために設計されたロボット。誤解のない場合、ロボットと略して記す場合があります。
ユーザ:歩行訓練ロボットから歩行トレーニングを受ける人。
スーパーバイザ:ユーザの歩行訓練状況を監視し、さらに歩行訓練ロボットの稼働状態を監視する人。
範囲
歩行訓練ロボットは、ユーザに歩行機能の改善を提供するために使用されます。このロボットは、さまざまな歩行パターンを実施でき、ユーザの特定のニーズに基づいてカスタマイズできます。
入力
参考文献
このドキュメントの作成にあたっては、次の参考文献を参考にしました。
・TBD
概要
このシステム設計仕様書は、まずシステムの概要を説明します。そのあとロボットの機能を説明します。システムのアーキテクチャとその構成要素であるコンポーネントを説明します。このドキュメントには、システムを視覚的に表現するために、ダイアグラムも含まれています。このドキュメントの対象読者には、開発チーム、プロジェクトマネージャー、および歩行訓練ロボットの開発に関与する利害関係者が含まれます。
システムの概要
システムの説明
歩行訓練ロボットは、ユーザに歩行訓練を提供するように設計されたロボットです。このロボットは、4輪の移動式で、ハンドル、手動ブレーキレバー、駐車ブレーキ、アシストモータ、バッテリ、ロボットのサポートアームなどのメカニカルに関係する部分と、ユーザインタフェース、制御コンポーネントなどのコンポーネントで構成されています。
システムの境界
歩行訓練ロボットは、使用方法を学習したスーパーバイザの下で、医療施設または介護施設で使用するように設計されています。歩行訓練ロボットは家庭用ではなく、スーパーバイザによる監視のもとユーザが操作する必要があります。
システムインタフェース
歩行訓練ロボットには、ロボット内に記録したユーザの歩行訓練に係る計測データをPCに通信するインタフェースが含まれています。
システムの制約
歩行訓練ロボットは、安全かつ効果的な運用を確保するため、いくつかの制約を満たす必要があります。 これらの制約には、アシストモータによる走行速度の制限、サポートベルトの引き上げ範囲の制限、サポートアームの動作範囲の制限、ユーザがこのロボットを押して歩行するときにかかる最大の力に関する制約があります。
仮定
歩行訓練ロボットは、さまざまなユーザが使用するように設計されています。このロボットの使用は、ユーザが十分な認知能力と身体能力を持ち、スーパーバイザの指示に従うことができることを前提としています。また、このロボットは、ユーザが適切な使用法についての知識を学び、自身で歩行訓練ロボットを操作する能力があることを前提としています。
機能仕様
機能仕様の導出
歩行訓練ロボットの機能仕様は、関係者(ChatGPT 3.5、xxx)協力の下で作成されたものです。 次のセクションでは、歩行訓練ロボットの機能仕様について概説します。
機能仕様詳細
歩行訓練ロボットは、以下に示す機能を提供します。なお、歩行訓練ロボット外のPC上のアプリケーションソフトウェアが、ロボットから受け取るユーザの歩行訓練情報をもとに訓練の評価と、その後の訓練計画に関する提案を行います。
ユーザの歩行訓練の評価: 歩行訓練ロボットは、ユーザの歩行訓練状況を記録します。このユーザの歩行訓練記録情報をPCに送信後、PC上のアプリケーションソフトウェアは、ユーザの歩行パターンを解析しユーザの歩行機能を評価します。
カスタマイズ: 歩行訓練ロボットは、ユーザのニーズと進歩に合わせてカスタマイズされたトレーニング計画を提供します。同計画の立案は、ユーザの歩行訓練履歴をもとに、PCのアプリケーションソフトウェアが行います。
リアルタイムのフィードバック: 歩行訓練ロボットは、歩行訓練セッション中にユーザにリアルタイムのフィードバックを提供します。
進捗状況の追跡: 歩行訓練ロボットは、ユーザの歩行訓練進捗状況に関するデータを追跡および保存し、PCに送信してスーパーバイザにレポートを提供します。
安全機構: 歩行訓練ロボットには、非常停止ボタンやモーションセンサーに基づくサポートベルトの引き上げや、サポートアームの展開などにより、ユーザがトレーニング中の怪我を防止するための安全機構が含まれています。
可動域: ユーザが歩行訓練ロボットを押して歩くことにより、股関節、膝関節、および足首関節を含む下肢の可動域のトレーニングを提供します。
調整可能な設定: 歩行訓練ロボットは、カスタマイズされたトレーニングプランとして歩行速度、ユーザの転倒防止装置の起動タイミングなど調整可能な設定を可能にします。
ユーザインタフェース: 歩行訓練ロボットには、ユーザが使いやすい直感的なユーザインタフェースを提供します。
データ管理: 歩行訓練ロボットは、ユーザデータを安全に管理し、関連するプライバシー規制を順守します。
非機能仕様
歩行訓練ロボットは、次の非機能仕様を満たします。
信頼性: 歩行訓練ロボットは、最小限のダウンタイムまたはエラーで確実に動作することとします。
スケーラビリティ: 歩行訓練ロボットは、複数のユーザに対応できるようにスケーラブルな設計を行います。
パフォーマンス: 歩行訓練ロボットは、安全機能に要求されるタイミングを遵守します。またユーザの歩行訓練データを送信する際のラグや遅延を最小限に抑えて、高性能に動作します。
セキュリティ: 歩行訓練ロボットは、ユーザの個人データを保護し、不正アクセスを防止するために、関連するセキュリティ基準に準拠します。
ユーザビリティ: 歩行訓練ロボットは、ユーザが効果的に操作できる直感的なインタフェースを備えます。
ユースケース
ユースケースの説明
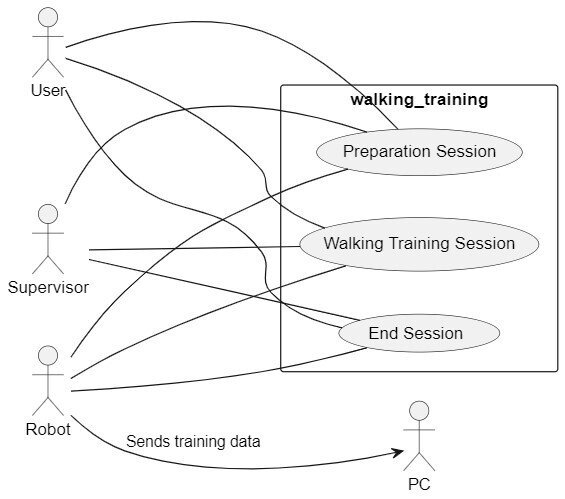
次の使用例では、ユーザと歩行訓練ロボットの間のさまざまな相互作用について説明します。ユーザは3つのセッションで歩行訓練を行います。
準備セッション: このユースケースでは、ユーザプロファイルのセットアップと、ユーザの体の重心の位置の測定と歩行パターンに応じたロボットのキャリブレーションを行います。
歩行訓練セッション: このユースケースは、典型的な歩行訓練のシーケンスです。これには、ユーザが歩行訓練ロボットのハンドルを押しながら歩きます。
終了セッション: このユースケースでは、ユーザが歩行訓練セッションを完了した後に、歩行訓練ロボットを停止します。
アクター
次のアクターがユースケースに参加します。
ユーザ:歩行訓練ロボットを使用する人物。
スーパーバイザ:歩行訓練全体を監督し、ユーザの歩行訓練状況及び歩行訓練ロボットの状態を監視する人物。
歩行訓練ロボット:ユーザが歩行訓練に使用するロボット。
PC:歩行訓練ロボットからユーザの歩行訓練データを無線LANで受信可能で、受信したデータを解析するアプリケーションソフトウェアを実行するコンピュータ。
イベントの基本的な流れ
各ユースケースの基本的なイベントフローを次に示します。
準備セッション:
ユーザまたはスーパーバイザは、歩行訓練ロボットの主電源をONにします。
ユーザプロファイルのセットアップとして、ユーザまたはスーパーバイザは、歩行訓練を行うユーザの名前、年齢、体重、身長などの個人情報を歩行訓練ロボットのユーザインタフェースから入力します。
歩行訓練ロボットのキャリブレーションとして、ユーザまたはスーパーバイザは、ユーザの身長に合わせ、歩行訓練ロボットのハンドルの高さを調整します。
ユーザは、サポートベルトを自分のウエストに巻きます。
ユーザは、歩行訓練ロボットのセンサーを使用して自身の体の重心位置を測定します。
歩行訓練ロボットは、ユーザの体の重心位置を記憶します。
歩行訓練セッション:
ユーザは、スーパーバイザから提示されたトレーニング計画に基づき歩行訓練ロボットのハンドルを押しながら歩きます。
歩行訓練ロボットは、ユーザの進行状況(歩行速度、歩幅、歩数、歩行距離、右または左への方向変更回数、体の重心位置の移動)を計測します。
歩行訓練ロボットは、ユーザが転倒しそうになったとき、サポートベルトを引き上げます。さらに、サポートアームをスライド、展開し臀部を支えます。
終了セッション:
ユーザは歩行訓練ロボットの駐車ブレーキを掛けます。
ユーザまたはスーパーバイザは、PCを操作し、歩行訓練ロボットからユーザの歩行訓練データをPCに受信します。
ユーザまたはスーパーバイザは、歩行訓練ロボットの主電源をOFFにします。
ユースケース図を下に示します。
代替フロー
これらのユースケースの代替フローはありません。
例外
ユースケースでは、次の例外が発生する場合があります。
準備セッション
ユーザは、自身の体の重心位置を決定するために必要な姿勢を取ることできません。この場合、スーパーバイザはこの姿勢をとることを支援します。
歩行訓練セッション
ユーザが、歩行訓練中に痛みや不快を感じます。この場合、スーパーバイザは歩行訓練ロボットを停止させます。
終了セッション
ユーザが歩行訓練を終了したあとに、歩行訓練データをPCに送信できません。その場合、スーパーバイザは、歩行訓練ロボットから歩行訓練データが記録されている媒体を取り出します。
システムアーキテクチャ
システムのコンポーネントへの分割
歩行訓練ロボットシステムは、次の4つの主要コンポーネントで構成されます。
ユーザインタフェースコンポーネント:ユーザが歩行訓練ロボットと対話するためのグラフィカルインタフェースを提供します。ロボットへ指示するスイッチによる入力と、ユーザに対する歩行訓練状態の表示が含まれています。
制御コンポーネント:ロボットメカトロニクスコンポーネントとユーザインタフェースコンポーネントを実行するために必要なソフトウェアが含まれています。
ロボットメカニクスコンポーネント:歩行訓練ロボットの物理構造と作動メカニズムが含まれます。
センサーコンポーネント:ユーザの動きを測定し、制御コンポーネントにフィードバックを提供するために使用されるセンサーが含まれています。
コンポーネントの機能
a)ユーザインタフェースコンポーネント
歩行訓練ロボットの主電源:ボタンスイッチON/OFF
歩行訓練ロボットの緊急停止:ボタンスイッチON
歩行訓練ロボットのアシストモータの電源:ボタンスイッチON/OFF
歩行訓練ロボットの最高速度の入力:最高速度 km/h
ユーザ個人情報の入力:氏名またはID、年齢、身長、体重、歩行機能レベル(注1)
歩行訓練ロボットのバッテリの充電容量の表示:棒グラフ
歩行訓練ロボットの状態表示:主電源のON/OFF、アシストモータの電源ON/OFF
歩行訓練中の状況の表示:歩行速度、歩幅、歩行距離
注1:歩行機能レベル:股関節、膝関節、足首関節の移動度などから決まる歩行機能レベル
b)制御コンポーネント
歩行訓練ロボットのユーザインタフェースのGUI制御:液晶表示とボタンON/OFFの検知
バッテリ充電容量の取得:バッテリの充電容量をバッテリから取得
歩行訓練ロボットの後輪駆動制御:歩行訓練ロボットのアシストモータの電源がONの場合で、かつユーザがハンドルをもって歩行訓練ロボットを押しているとき、2つの後輪の回転を、後輪それぞれのモータでアシスト。このとき床材質に応じてアシスト回転を制御
歩行訓練ロボットの自動ブレーキ制御:センサーコンポーネントが障害物を検知した場合、または歩行訓練ロボットが転倒した場合に4輪すべてを自動で停止
歩行訓練ロボットの速度制限制御:2km/h以下に制御
サポートベルトの引き上げ:ユーザの重心の位置が100mm低下したことを検知した後、サポートベルト引き上げ専用のモータによりユーザのサポートベルトを準備セッション時に設定した重心位置まで引き上げ
サポートアームのスライドと展開:ユーザの重心の位置が100mm低下したことを検知した後、2つのサポートアームそれぞれを制御するモータが、各サポートアームを格納場所からスライドさせ、ユーザの臀部まで移動し、ユーザの重心が200mm以下に下がったときにアームを臀部の下に展開。この、アシストアームは作動するときにユーザの体に接触しないようにスライドおよび展開。ユーザの体と接触の恐れがある場合は、作動を停止
c)ロボットメカニクスコンポーネント
手動ブレーキ:ユーザがハンドルのブレーキレバーを引くことにより、4輪すべてを停止
自動ブレーキ:歩行訓練ロボットが転倒したときに4輪すべてを停止
駐車ブレーキ:歩行訓練ロボットを駐車するときに、ユーザが駐車レバーを引いて後輪を停止
モータによる後輪駆動アシスト:2つの後輪にはそれぞれ1つのアシストモータがあり、後輪それぞれの回転をアシスト。これらのアシストモータの電源は充電式バッテリから供給
歩行訓練ロボットの前進速度計測:後輪の回転数から速度を計測
歩行訓練ロボットのサポートベルトの引き上げ
歩行訓練ロボットのサポートアームのスライドと展開
d)センサーコンポーネント
歩行訓練ロボットの転倒検知
歩行訓練ロボットの前方180度、後方180度の障害物検知
ユーザの重心の位置を10mm単位で計測
ユーザの歩幅を10mm単位で計測
サポートアームが持つセンサーが、ユーザの体との距離を10mm単位で計測
床面センサーによる床材質検知
コンポーネント間の相互作用
a)ユーザインタフェースコンポーネントから制御コンポーネントへの出力
主電源ボタンスイッチON/OFF情報
緊急停止ON情報
アシストモータ電源ON/OFF情報
b)制御コンポーネントからユーザインタフェースコンポーネントへの出力
バッテリの充電容量情報
歩行訓練ロボットの速度情報
ユーザの歩行距離情報
ユーザの歩幅情報
センサーの異常情報
後輪駆動モータ異常情報
サポートベルトモータ異常情報
サポートアームモータ異常情報
c)制御コンポーネントからロボットメカニクスコンポーネントへの出力
自動ブレーキ制御情報
サポートベルト引き上げモータON/OFF情報
サポートアームのスライドと展開モータON/OFF情報
診断開始指示情報
d)制御コンポーネントからセンサーコンポーネントへの出力
センサー診断指示情報
e)ロボットメカニクスコンポーネントから制御コンポーネントへの出力
歩行訓練ロボットの速度情報
バッテリの充電容量情報
手動ブレーキON情報
後輪駆動モータ異常情報
サポートベルトモータ異常情報
サポートアームモータ異常情報
f)センサーコンポーネントから制御コンポーネントへの出力
歩行訓練ロボットの転倒検知情報
歩行訓練ロボットの前方または後方障害物検知情報
ユーザの重心の床からの距離:10mm単位
ユーザのモーション測定情報:歩幅(10mm単位)
サポートアームのセンサーによるユーザ身体との距離情報:10mm単位
ハンドル設置の力センサーによるユーザ負荷情報
床面センサーによる床材質情報
転倒検知センサー診断情報
障害物検知センサー診断情報
ユーザの重心位置計測センサー診断情報
アーキテクチャコンポーネント間の情報のやり取りを図示したUMLのコンポーネント図を以下に示します。

配置
ユーザインタフェースコンポーネントの液晶表示と、ユーザインタフェースコンポーネントのボタンスイッチのON/OFF状態検知と、ロボットメカニクスコンポーネントの制御及び監視、センサーコンポーネントの制御、制御コンポーネント内の演算を行うソフトウェアは、制御コンポーネント内のCPUにインストールされます。
インタフェースとプロトコル
ユーザインタフェースコンポーネントは、グラフィカルユーザインタフェース (GUI) を使用してユーザと対話します。制御コンポーネントは、ロボットオペレーティングシステム (ROS) メッセージングプロトコルを使用して、ロボットメカニクスおよびセンサーコンポーネントと通信します。ロボットメカニクスコンポーネントには、ROS メッセージングプロトコルと互換性のあるアクチュエータとセンサーが含まれます。センサーコンポーネントは、力センサーやモーションキャプチャシステムなどのさまざまなセンサーを使用して、ユーザの動きを測定します。
データ管理
データの説明
歩行訓練ロボットは、ユーザの情報、ユーザの歩行訓練データ、歩行訓練ロボットのログデータを生成して使用します。ユーザ情報には、氏名、年齢、身長、体重の個人情報が含まれます。 歩行訓練データには、歩幅、歩行速度、歩数、歩行時間など歩行訓練中に取得したデータが含まれます。歩行訓練ロボットのログには、主電源のON/OFFイベント、ブレーキON/OFFイベント、自動ブレーキON/OFFイベント、サポートベルトON/OFFイベント、サポートアームON/OFFイベント、歩行訓練ロボットの転倒、バッテリ充電容量、システムのエラー、および警告に関する情報が含まれます。
データストレージ
歩行訓練ロボットは、ユーザ情報と歩行訓練データを歩行訓練ロボットの記録メディアに保存します。システムログも同じ記録メディアに保存されます。 すべてデータについて、データの整合性と可用性を確保するためのバックアップと復帰のメカニズムを用意します。
データ検索
ユーザまたはスーパーバイザは、安全なインタフェースを介してユーザ情報と歩行訓練データを取得できます。歩行訓練ロボットのログには、認証された担当者のみが安全なインタフェースを介してアクセス可能とします。
データ送信
歩行訓練ロボットとPC間のデータ転送には、安全な通信プロトコルを使用して、データの機密性、完全性、可用性を確保します。 歩行訓練ロボットは、PCの通信時にデータを暗号化して安全なファイル転送プロトコルを使用します。
セキュリティ
セキュリティ要件
歩行訓練ロボットは、データの機密性、完全性、および可用性を確保する必要があります。 また、データの不正アクセス、変更、または開示を防止する必要があります。
アクセス制御
歩行訓練ロボットが記録したデータには、許可された担当者のみがアクセスして変更できるように、適切なアクセス制御を実施する必要があります。これには、ユーザ認証およびアクセスロギングが含まれます。
認証と認可
歩行訓練ロボットが記録したデータに対してアクセスする担当者は、歩行訓練ロボットが記録したデータにアクセスする前に認証を受ける必要があります。 認証は、パスワード入力など安全なメカニズムを使用して実行する必要があります。 承認は、ユーザまたは管理者の役割と権限に基づいている必要があります。
個人データのプライバシーと保護
歩行訓練ロボットは、患者データのプライバシーと保護を保証する必要があります。 すべての機密データは、転送中および保管中に暗号化する必要があります。 さらに、歩行訓練ロボットには、データ侵害を防止する仕組を持つこととします。
セキュリティテスト
システムは、潜在的な脆弱性を特定して対処するために、厳格なセキュリティテストを受ける必要があります。 これには、侵入テスト、脆弱性スキャン、およびコード レビューが含まれます。 継続的なシステム セキュリティを確保するために、セキュリティ テストを定期的に実行する必要があります。
ユーザインタフェースデザイン
ユーザインタフェースの要件
歩行訓練ロボットのユーザ インタフェースは、ユーザとスーパーバイザの両方に直感的でユーザ フレンドリーなエクスペリエンスを提供するように設計する必要があります。 インタフェースは、次の要件をサポートするように設計する必要があります。
インタフェースは、ユーザとスーパーバイザの両方が簡単にナビゲートして使用できるようにする必要があります。
インタフェースは、身体障害を持つ患者がアクセスできる必要があり、関連するアクセシビリティ基準に準拠する必要があります。
インタフェースは、さまざまなユーザやスーパーバイザに対応するために、多言語インタフェースをサポートする必要があります。
インタフェースは、トレーニング セッション中の患者の進行状況に関するリアルタイムのフィードバックを表示する必要があります。
インタフェースは、スーパーバイザが個々のユーザのトレーニングプログラムをカスタマイズできるようにする必要があります。
ユーザインタフェースの設計
歩行訓練ロボットのユーザインタフェースは、歩行訓練プログラムを通じてユーザとスーパーバイザをガイドするための、わかりやすい指示と視覚的な合図を備えたシンプルでクリーンなデザインとします。 設計は、ユーザエクスペリエンス設計における最新の業界標準とベストプラクティスに従います。
インタフェースは、次のコンポーネントで構成します。
トレーニングプログラムに関する情報と開始方法の説明を提供するウェルカム画面
ユーザの個人情報を表示するユーザのプロファイル画面
歩行訓練セッション中のユーザのエクササイズ、リアルタイムのフィードバック、進捗状況を表示するトレーニング画面
スーパーバイザがトレーニングプログラムをカスタマイズし、ユーザの訓練進捗状況を追跡し、レポートを生成できるようにするダッシュボード
ユーザとスーパーバイザがインタフェース、言語設定、およびその他の設定をカスタマイズできるようにする設定画面
ナビゲーション
ユーザインタフェースのナビゲーションは、直感的で使いやすいものにします。 ユーザインタフェースは、液晶画面とボタンスイッチを通じてユーザをガイドするために、明確で簡潔な指示を提供します。
インタフェースは、
歩行訓練ロボットの稼働状態表示画面:主電源のON/OFF、アシストモータの電源ON/OFF、バッテリの充電容量として棒グラフ、ブレーキON
ユーザの歩行訓練状態表画面:ユーザID、歩行速度、歩数、歩行時間
上の2つの画面は、主電源がONのときに表示されます。
歩行訓練ロボットのメンテナンス表示画面:制御コンポーネントの状態。アシストベルトモータ状態、アシストアームモータの状態、障害物検知センサー状態、自動ブレーキ制御状態。この歩行訓練ロボットのメンテナンス表示画面は、メニューで切り替えることができることとします。
ユーザビリティテスト
ユーザインタフェースの設計についてユーザビリティテストを実施し、ユーザとスーパーバイザのニーズを満たしていることを確認する必要があります。ユーザビリティテストは、歩行障害のある患者を含む代表的なユーザを対象に実施し、インタフェースがすべてのユーザにとってアクセシブルでユーザフレンドリーであることを確認する必要があります。
ユーザビリティテストには、次のアクティビティを含める必要があります。
インタフェースがユーザの歩行訓練プログラムをどの程度サポートしているかを評価するためのタスクベースのテスト
インタフェースの使いやすさとユーザエクスペリエンスに関するフィードバックを収集するための調査とアンケート
ユーザとスーパーバイザが自然な環境でインタフェースをどのように使用しているかを理解するための観察
ユーザビリティテストの結果に基づいて、ユーザインタフェースを改良し、ユーザとスーパーバイザに可能な限り最高のエクスペリエンスを提供できるようにする必要があります。
システムテスト
システムテストは、歩行訓練ロボットのシステム設計仕様が満たされ、歩行訓練ロボットが期待どおりに機能していることを確認するために実行されます。システムテストには、機能テスト、パフォーマンステスト、セキュリティテストなど、さまざまな種類のテストが含まれます。
テスト戦略
テスト戦略には、テストプロセスの有効性と効率を確保するための適切なテスト方法、ツール、および手法の選択が含まれます。テスト戦略には、次の手順が含まれます。
テストの目的と要件の特定
テストの範囲と範囲の定義
テスト方法とテストツールの選択
テスト計画とテストケースの作成
テストケースの実行と結果の分析
テスト結果と不具合の報告
回帰テストの実施
テスト計画
テスト計画は、テストの全体的なアプローチ、目的、および範囲を定義します。 テスト計画には次の要素が含まれます。
テストの目的と要件
テストの範囲
テストのアプローチと方法論
テストのスケジュールとリソース
テスト環境と構成
テストデータとシナリオ
テスト結果成果物とレポートのレビュー
リスク評価とリスク軽減計画
不具合管理と追跡
テストケース
テストケースは、システムの機能を検証するために開発されます。 テストケースには、次の要素が含まれます。
テストケースIDと名前
テストケースの目的と説明
前提条件とテストされた入力(正しい入力)
テスト手順
テストデータと構成
テストの優先度と重大度
期待される出力と結果
テスト状況と実行結果
テスト結果
テスト結果は文書化され、プロジェクトチームと関係者に報告されます。 テスト結果には、次の情報が含まれます。
テスト概要と範囲
テスト環境と構成
テスト実行後に、合格/不合格となったテストケース
見つかった不具合とその影響
テスト指標と分析
テストのフィードバックと推奨事項
サインオフと承認
メンテナンスとサポート
メンテナンスとサポートは、歩行訓練ロボットを含むあらゆるシステムの重要な側面です。 歩行訓練ロボットが仕様通り機能し、ユーザのニーズを確実に満たすためには、しっかりとしたメンテナンスとサポートの計画を立てることが重要です。
メンテナンス要件
歩行訓練ロボットのメンテナンスには、システムコンポーネントの定期的な検査、クリーニング、およびキャリブレーションが含まれます。 必要な修理やコンポーネントの交換も保守計画の一部になります。メンテナンス活動は、歩行訓練ロボットのメンテナンス知識を持つ訓練を受けた担当者によって実施されます。
サポート要件
歩行訓練ロボットのサポートは、ユーザマニュアル、技術サポート、およびトレーニングの形でユーザに提供されます。歩行訓練ロボットに関する問題や質問については、テクニカルサポートを利用できます。ユーザとスーパーバイザには、歩行訓練ロボットの機能、制限事項、およびメンテンアンス要件を概説したユーザマニュアルが提供されます。さらにユーザが歩行訓練ロボットを効果的に操作できるように事前トレーニングが提供されます。
保証
歩行訓練ロボットには、購入日から 1 年間、ロボットの部品または製造上の欠陥をカバーする標準保証が付いています。保証は、保証期間中のコンポーネントの必要な修理または交換をカバーします。
サービスレベルアグリーメント (SLA)
サービスレベルアグリーメント (SLA) は、歩行訓練ロボットの購入者がメンテンナンスプロバイダーから期待できるサポートのレベルを概説します。 SLA は、テクニカルサポートリクエストの応答時間、交換部品の入手可能性、およびユーザに提供されるその他のサポートを指定します。また、SLA は歩行訓練ロボットの定期的なメンテナンスを実行する必要性など、購入者の責任についても概説します。
歩行訓練ロボットの長期的な成功を確実にするためには、明確に定義されたメンテナンスとサポートの計画が不可欠です。この計画は、歩行訓練ロボットを効果的に使用するために必要なサポートをユーザに提供し、歩行訓練ロボットが長期にわたって最適に機能し続けることを保証します。
結論
まとめ
歩行訓練ロボットシステムは、歩行障害をもつ患者または歩行機能が低下した高齢者の歩行機能を改善するための、安全かつ効果的な方法を提供するように設計されています。 このシステムは、ロボットの外骨格、制御コンポーネント、ユーザインタフェースなど、いくつかのコンポーネントで構成されています。 このシステムは、さまざまなセンサーを利用して歩行訓練中のユーザの動きを検出し、ユーザにリアルタイムのフィードバックを提供します。 歩行訓練ロボットシステムは、ユーザの歩行パターン、速度、および安定性を改善し、全体的な生活の質の向上につなげることを目的としています。
将来に向けて
将来的には、歩行訓練ロボットと機械学習アルゴリズムと統合して、各ユーザの特定のニーズに合わせた歩行訓練を可能になります。 さらに、歩行訓練ロボットを複数台もつ所有者に対して、同ロボットとユーザ情報を統合的に管理するシステムを提供することが望まれます。
変更履歴
0.1 2023年4月7日 初版
あとがき
ChatGPTに要件定義を入力してシステム設計を自動で行うことはできませんでした。今後、対話しながら設計する方法を探らないといけません(いわゆる、システム設計のためのプロンプトエンジニアリング)。
システム設計中にChatGPTのすごさに感嘆したことがあります。自分が書いたユースケースの説明文をもとに、UMLのユースケース図のPlantUMLのコマンドを自動で生成してくれました。本文のユースケース図は、ChatGPTが生成したPlantUML向けのコマンドをもとに生成した図です。また、そのままは使えませんでしたが、UMLのコンポーネント図のPlantUMLのコマンドひな形も作成くれました。ただ、思うような図にならなかったため、本文のコンポーネント図は、PlantUMLのコマンド記述を作成し直しました。
話はそれますが、研究されている自然言語(日本語)で仕様書を作成し、それをもとにメカトロニクス製品を設計する時代が到来した気がします。
今後数年の間に、人がモデル(例えばUML,SysML図)を作成して設計する時代は終わる気がします。モデルベースエンジニアリング(MBE)から自然言語ベースエンジニアリング(NLBE)に移行するかもしれません。
最後に
製品の開発を念頭におき試行錯誤しながらこのシステム設計仕様を書いていますが、自分は製品開発の予定はなく設計のみです。また、このシステム仕様を用いて製品を開発した場合に、事故や知財権等の問題が起きても責任をとることができませんので、ご注意のほどよろしくお願い致します。