3Dスキャナー買う前に。比較的やさしい個人向け3Dスキャナー概論【2024年版】

※写真から生成するタイプの3Dスキャン(フォトグラメトリーやAI生成3D形状)は扱いません。iPhone/ iPadを使った3Dスキャンも扱いません。比較検討が面倒な割にスキャン品質はこれから紹介する専用機材と比べて低いので。
この記事は混沌とした個人向け低価格3Dスキャナーについて基礎情報を整理して、初心者の手助けになることを願った記事です。
具体的にはRevopointとかShining 3D Einstarとかの記事です。
なお、この記事を書いている人間は「個人向け低価格3Dスキャナー」というニッチな商品が出始めたごく初期から界隈に突入し、個人輸入等で計10台以上を自腹で購入したおじさんです。
これまで3Dスキャナーに費やした金額は平均すると1台10万円前後として・・・いや・・・この話やめようか・・・やっぱつれぇわ・・・
●3Dスキャナーってなに?
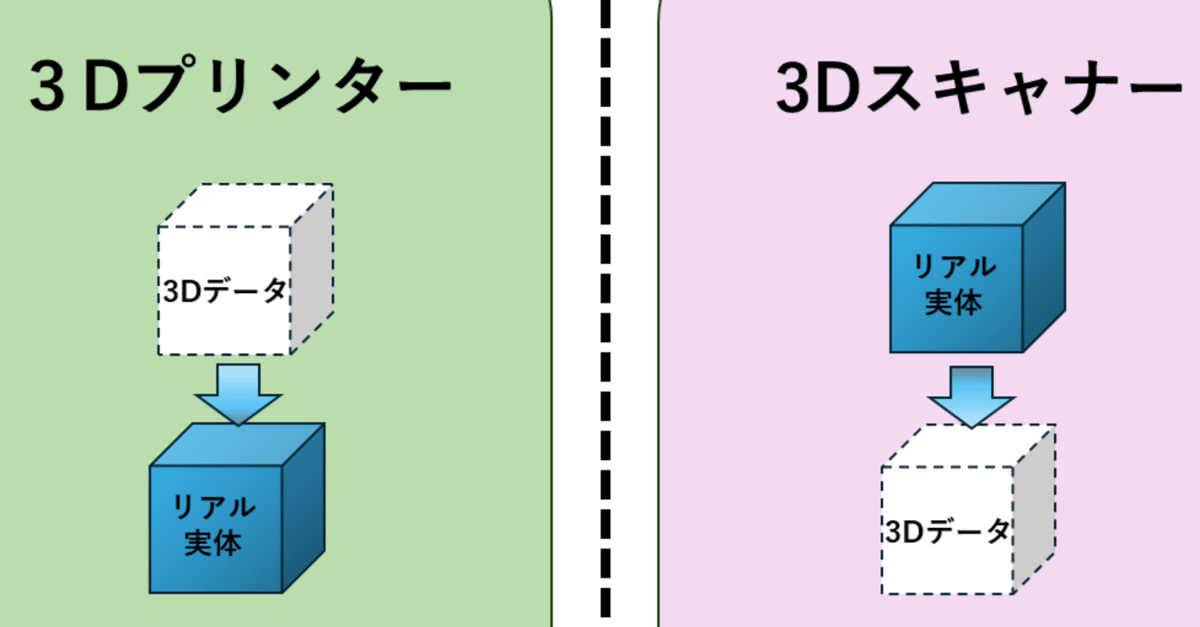
3Dスキャナーってなんやろね?って話なんですが、要するに「実体をデータに変換する機械」ですよね。たとえば3Dプリンターはデータを実体に変換する機械ですが、3Dスキャナーは実体をデータにする機械。
◆3Ⅾプリンター
3Dデータをリアル世界に変換する機械
◆3Dスキャナー
リアル世界を3Dデータに変換する機械

●3Dスキャナーをどう活用する?
3Dスキャナーの活用法として代表的なのは、3D形状アーカイブ、3Dモデリング資料とリバースエンジニアリングです。
この記事を読んでいるのは3Dスキャナーに興味があるか、購入を検討している人が多いと思いますので、まず「実際こういう使い方はできるのか?」を厳しめの視点でお話ししておきます。

3Dモデリングの参考資料
写真を見ながら3Dモデリングするより最初から3D形状があったほうが楽じゃね?という使い方です。
3Dスキャンしたデータを加工して完成品に仕上げるのはあきらめてください。無理です。この記事の後半で出てくる小さなレゴブロックの3Dスキャンデータですら21万頂点あります。リトポ機能がめちゃくちゃ便利に進歩すれば可能性が生まれますが、現在はモデリングの参考資料として使うのが良いだろうと思います。
モデルをスキャンデータに合うようにリトポするアドオンがあります。
https://blendermarket.com/products/softwrap?search_id=33258784
特にiPhoneを使った3Dスキャン(フォトグラメトリ)は形状の再現度が相対的に悪いですが、頂点数は少なくなりますので検討しても良いかと思います。繰り返しになりますが、この記事は専用のスキャナーを使った3Dスキャンだけを扱っています。
ただ、自分でイチからモデリングするにしても、3Dスキャンデータを重ねながら作業すれば作業効率はメチャクチャ向上します。「あれ?ここ形状どうなってんの?」「ここの曲面の具合こんな感じでいいかな?」がすぐ画面上で確認できるので。
3D形状アーカイブ
土器などの文化財や骨格標本などそういう価値のある物体をデジタル化して保存、活用しましょうという活用です。
これに関してはそもそも個人向け低価格3Dスキャナーでそれやるか?業務用スキャナー買うか業務委託したほうが良いのでは?という話をしておきます。(実際そういう使い方をされる人がいらっしゃるので)
こと3Dスキャナーに関してはデータ品質は価格に比例します。上限は数千万まである3Dスキャナーの世界で最安値に近い数万円の個人向け低価格3Dスキャナーを使うというのは、データ品質に関してほぼ下限となる手段を用いているということは自覚したうえで購入・使用するのが良いでしょう。
リバースエンジニアリング
私はリバースエンジニアリング目的で3Dスキャナを購入しました。おおむね便利に使えていますが、いくつか妥協が必要です。
・寸法精度は最良で±0.1~0.2mm程度
・ピン角の角部はスキャンできない
・溝など奥まったところはスキャンしづらい(ほぼ不可)
・ピストンなど凹凸が少ない円筒部品はスキャンしづらい(ほぼ不可)
・スキャンした形状は計測誤差によるうねりを含んだ形状である。
・なので円が綺麗に出ず穴の中心などはエイヤになる
(自動で円の中心を出すは産業用の専用ソフトが必要)
・メッキなど光沢面や逆に黒色がスキャンしづらい(対応策あり)
など。
とはいえ、ノギスとメジャーで計測するしかなかった時代に比べれば3Dスキャナの登場は革命的なので「使い勝手や精度はそれなり」を許容できるのであれば個人向け低価格3Dスキャナーは心強いツールです。「使い勝手や精度はそれなり」なので重要な寸法は従来のツールで計測して信頼性を担保してください。
3Dスキャンに向いていないもの
・子供、動物のスキャン
3Dスキャナーは撮影に3分以上かかるので、じっとしていられないものを撮るには向いていません。スキャン中に動いた部分は動く前、動いた後それぞれスキャンされるので、頭や腕が増えるような結果になります。(シャッター押す瞬間に動いちゃった写真みたいな感じですね。)
・透明、半透明なもの
個人向け低価格3Dスキャナーはスキャナーのライトから光を出して、跳ね返ってきた光を撮影することで3Dスキャンしています。
なので光を反射しないもの、例えば透明なものは極端に撮影しづらいです。
同じように光を反射せず吸収する黒色もスキャンしづらいですが、スキャナーのセンサーが徐々に良くなってきており、個人向け低価格3Dスキャナーでも黒色のスキャンは不可能ではなくなりつつあります。
・極端に大きな物、小さな物
極端に大きな物というと例えば家一軒とかは現実的ではないです。クルマ1台がギリ撮れる限界です。それより大きな物はフォトグラメトリとか別の手段を検討してください。
小さな物というと、目安として指1本より小さな物は撮りづらいです。無理やりスキャンするテクニックはありますが、物の小ささに応じた解像度が得られるかというと難しいです。特にジュエリーなどディティールが大切なモノは産業用のキチンとしたスキャナでなければ満足いくデータは得られないと思います。
●3Dスキャナーの中でなにがおきてる?
3Dプリンターが3DデータをChituboxやCuraでプリンタが読み込める形式に変換するように、3Dスキャナーも専用のソフトウェアでの変換が必要です。

ソフトウェア自体は3Dスキャナーメーカーが用意してくれるので心配ありません。使い方も簡単なので2~3回で覚えられます。
大切なのはスキャナーから出てくるデータは専用ソフトを通さないと使い物にならないというところです。
そしてこれは私の経験に基づくものですが、リアルワールド(3次元)とデジタルワールド(2次元)の境目にある工程が品質に大きく影響します。
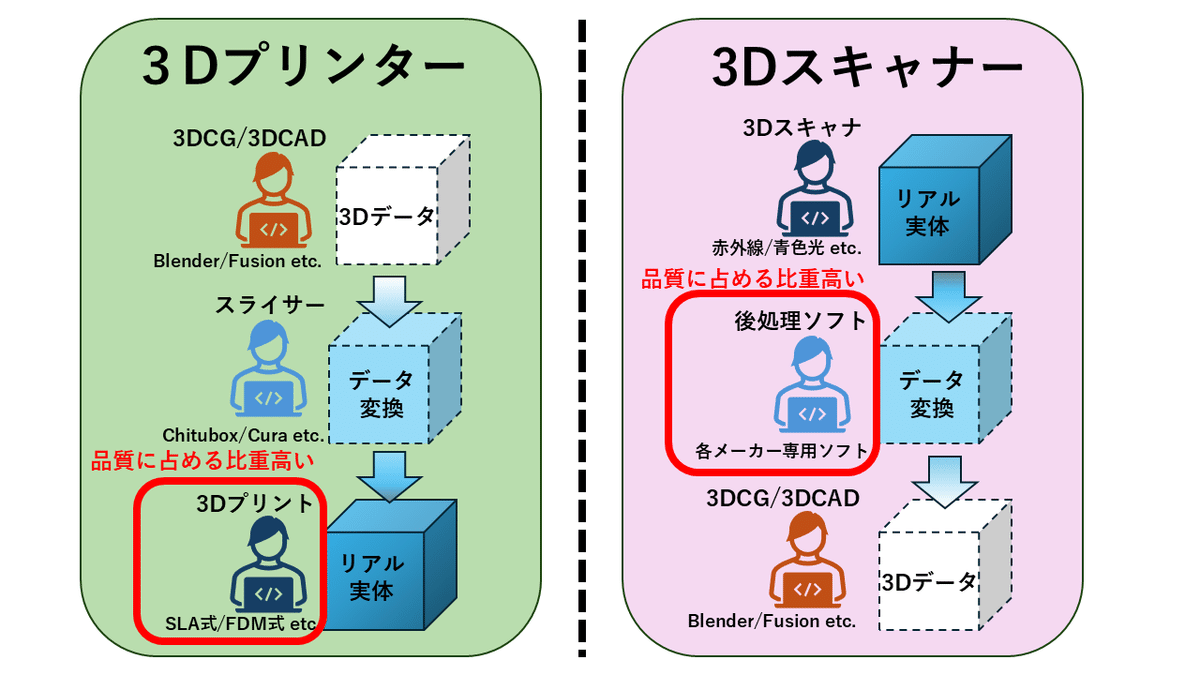
デジタル世界でのさまざまな操作は基本的に可逆(やりなおせる)ですが、デジタル世界とリアル世界は本質的に変換不可能なので、変換する過程で情報が失われます。なのでデジタルとリアルの変換を行う工程の品質がとても大切です。
従って、3Dプリンターではスライサーよりも3Dプリンター本体が重要で、3Dスキャナーではスキャナー本体よりも後処理ソフトが重要です。
そして後処理ソフトの出来はメーカーのソフト開発部隊のスキルに紐づくものです。ダメなソフトを使っているメーカーはスペックの高いスキャナを開発してもダメなままで、イケてるメーカーはスキャナが多少ダメでもイイ感じのスキャンができます。

じゃあ3Dスキャナーにおける「後処理ソフト」って具体的にはどんな仕事をしているかというと、大きくは3つです。
1.追尾しながら撮影する(Tracking)
2.点群を融合する(Point fusion)
3.メッシュデータに変換する(Meshing)

1.撮影・追尾
◆撮影
3Dスキャナーがどうやって撮影してるか、原理については説明しません。原理は難しく、たとえ理解したところで3Dスキャナー利用者には利益がないからです。「構造化光」とかでググって理解した気になりましょう。
大事なのは「スキャナから光を発射して反射してきた光を撮影している」ということです。つまり「スキャナから出した光が届かない、影の部分はスキャンできない」ということです。たとえば人間を3Dスキャンしたとて内臓まではスキャンできないし、足の裏もできないし、指の股とか耳の裏とか奥まったところもかなりスキャンしづらいです。
「スキャナから出した光がスキャナに帰ってこなければスキャンできない」ということも覚えておいてください。黒色は光を吸収するのでスキャンがしづらいです。
◆追尾(Tracking)
3Dスキャンは3D写真を合成することで最終的な形状を得ています。

後からまとめて位置合わせするのは難しいので撮影しながらデータの位置を細かく合わせてズレを抑えています。
この撮影中に行われる位置合わせのことを追尾(Tracking)といいます。
位置合わせについてレッサーパンダの写真を例に説明します。

3Dスキャナーには10cm~30cm四方くらいの範囲しか写らないので部分ごとに撮影して合成する必要があります。
(ちなみにレッサーパンダは柴犬くらいの大きさがあり、思ったより大きくもさもさしており、思ったよりかわいいです。)
1度で全体を撮影できないので何度かに分けて撮影して後から位置を合わせて合成して全体像をつくることになります。今回は4分割で撮影、後から合成することにします。

まず左上からスキャナーで撮ります。スキャナには顔だけ写りますね。

次にカメラを右下に移動させるとレッサーパンダの顔と胴体が写ります。
3Dスキャナは顔と胴体の位置関係が分からない(全体像が写らない・見えていない)ので顔と胴体をどう繋いだらいいかわかりません。今回はちょうどいいところにレッサーパンダちゃんのかわいいお鼻があるので、お鼻を目印に位置を合わせます。

そしてカメラを下に動かすとレッサーパンダの前足が写りますが全体的に黒く、基準になるところがありませんね。正確に位置を合わせるのが難しいですね。

さらにカメラを右に動かして胴体を撮影すると特徴が無くなって位置合わせがさらに難しくなります。

実際の3Dスキャンではこういう位置合わせが1秒間に何回も自動で行われています。たいていは位置合わせが成功するのですが、失敗するとどうなるか実例を見てみましょう。
これはレゴブロックの3Dスキャンです。一定速度で回転する台(電動ターンテーブル)にレゴブロックが乗っています。
Revopoint POP、センサはぼちぼちの性能があってデータが取れているのだけれども、専用ソフトのトラッキングがダメダメなのでスキャン撮影がどうにもならないっぽい。 pic.twitter.com/EID1aJKbeT
— capbolt (@hex_cap) June 13, 2021

動画をよく観察すると、レゴブロックが2面写っているときはマトモに追尾していますが、1面だけ写るようになったときに追尾が失敗しています。
原因はいろいろありますが、例えばこういう原因が考えられます。

「伸びちゃった」タイプの追尾失敗をもう1例見てみましょう。こういう失敗は特にRevopointの3Dスキャナーでよくおきます。
Revopointは特徴点少なくなると亜空間にワープするクセがあるんだよなー pic.twitter.com/AvdKN2j6TA
— capbolt (@hex_cap) July 16, 2023
追尾失敗を防ぐ方法はいくつかあります。代表的なものは「マーカー」と呼ばれる白黒目玉模様のシールです。たいていの3Dスキャナには「マーカー」シールを認識して追尾の位置合わせの基準にしてくれる機能があるし、スキャナを買うとシールが100枚程度付属している場合もあります。


マーカーシールの「白丸」を位置合わせの基準になります。上の画像でも赤点として表示されていて、位置合わせのための特別なポイントとして認識されていることがわかりますね。
ちなみにこの「マーカー」シールは大量に貼りつける必要があって、シールを貼り付ける作業も、剥がす作業も、剥がした後に残った糊を綺麗にする作業もかなり面倒です。面倒です。大切なことなので2回言いました。面倒です。本当に。
さて、追尾さえうまくいけば撮影が完了するので、次は後処理に進みます。
2.点融合(Point Fusion)
撮影したデータはまとめなおされ、ノイズ除去など必要な処理がされて点群(Point cloud)データとして出力されます。これが点融合(Point Fusion)です。
点群(Point cloud)はなにかというと、こういうものです。点の集まり。
このデータでは0.1~0.2mm程度の間隔で点が並んでいます。

3Dスキャナーは物体の面を面として撮影するのではなく、点(座標)の集まりとして撮影しています。デジカメで撮った写真だって拡大してくとドット(ピクセル)の集まりでしょ?
3Dスキャナーのスペック表で「解像度」と呼ばれるものは点群における点と点の最小間隔を指していることが多いです。
まぁ個人向け低価格3Dスキャナーであれば、点群の間隔は0.1mm~1mm程度です。(現状は定義も規格もなにもあったものではない状況なので、各社スペック表に書いてある数値が実際出るかというとそうではないです。)
さて、点群(Point cloud)は3DCG(Blender)や3DCAD(Fusion)で扱いづらいので次の工程でさらに処理します。
3.メッシュ化(Meshing)
点群(Point cloud)をメッシュデータ(STL、OBJ等)に変換します。

先ほどのレゴブロックのデータを変換してみるとで21万頂点、データサイズで30MBくらいのOBJになりました。
データサイズが大きいのですが、点群からメッシュに変換する際にメッシュの荒さを調整することでデータサイズをある程度はコントロールできます。データを軽くするためにメッシュを荒くすると形状のディティールも荒くなるので注意が必要です。
また、点群をそのまま忠実にメッシュへ変換するので、面はうねっているし角は丸くゆがむ傾向にあります。(ノイズ・誤差によるゆがみ成分も再現される)ちなみに3Dスキャナーのメーカーから提供されるソフトにはリトポ機能は無いので必要であれば各自適当にやってください。

●3Dスキャナーの分類
原理からはいったん離れて、どういうスキャナーが売られているか見ていきましょう。
スキャナ・PC分離型/ オールインワン
スキャナ・PC分離型
スタンダードな形です。PCの画面でスキャン結果を見ながらスキャンするタイプ。

オールインワン
スキャナ本体にディスプレイを搭載してあり、スキャナ単体でスキャンが可能なタイプ。2024年現在ではEinstar VEGAとRevopoint MIRACOが該当します。

比較的高価(30万円弱)なのがネックだがPCを持ち出さなくて良いので便利です。しかしCPUの能力はPCに劣るのでデータ処理に時間がかかるしバッテリーの容量が小さめで連続稼働時間は1~2時間程度です。
スキャナ・PC分離型でもメガネ型の無線接続ディスプレイと併用すればオールインワン型に近いことができます。
https://air.rokid.com/
小物向け/ 中・大物向け
手のひらサイズの小物から乗用車のような大物まで1台ですべてカバーできる機種は個人向け低価格3Dスキャナーにはありません。(メーカーの宣伝を真に受けないように)
3Dスキャナーは設計段階で得意分野が決められており、それに合わせて製造されています。
スキャナーに写る範囲(FOV)によっておおむね分類できます。
これはスキャナーに写る範囲(FOV)の概念図です。遠くなれば広がり、近くになれば狭まる。

FOVの概念図。画像に書いてある数字は真に受けないように。Revopointが出す数字はどうせ嘘。
FOVが変わってもセンサの解像度は同じなので、物体とスキャナが近ければ解像度の高いスキャンが、遠くなれば解像度が荒くなります。あまり遠く/近くなるとピントが合わなくなって撮れなくなります。
なのでメーカーの想定する範囲(小物/中型/大型)を逸脱するとピントが合わなくなりスキャンがうまくいかなくなります。
今のところ、小物から大型まですべてカバーする最強3Dスキャナーはありません。得意分野ごとに3Dスキャナーを使い分けましょう。
・小物向け
スキャナーに写る範囲が狭ければ位置合わせのためとして使える凸凹(特徴)をつかみづらいので追尾(Tracking)に失敗しやすくなりますが、そのぶん解像度を高めやすいので「小物向け」となります。
「マーカー」シールを使えば大物も撮れないことはないのですがとても面倒なのは先に説明した通りです。
例:Revopint POPシリーズ、Miniシリーズなど
・中・大物向け
FOVが広ければ大きなモノでも追尾しやすいですが、代わりに解像度は落ちます。これが「中・大物向け」です。
例:Revopint MIRACO、RANGEシリーズ、Shining3D Einstarシリーズなど
赤外線/ 青色光/ 可視光
3Dスキャナーがスキャンに使用する光にも種類があります。
・赤外線
スタンダードなタイプ。青色光より外乱に強く屋外スキャンにもある程度耐える。
例:Revopoint POPシリーズ、Shining3D Einstarシリーズなど
・青色光
高解像度を求める機種が使う。赤外線より光の波長が短いので解像度を高めやすいとされる。太陽光などの外乱に弱いので屋外スキャンには向かない。
例:Revopoint Miniシリーズなど
・可視光
外乱を受けやすいが、その代わり撮像素子にデジカメ用の高解像度センサーが使えるので比較的安価に解像度を高めることができる。
例:Matter & Form THREE
●3Dスキャナーと一緒に必要なものは?
できるだけ用意したほうが良いもの
・カメラ用三脚(2000~3000円くらいの安物で良い)
スキャナに付属している小型三脚は使い勝手が悪いので。
・黒色で大きな紙かスチレンボード(100均のA3くらいのやつ)
背景が一緒に写り込むのを排除するため。写り込みを後から編集で消すのが面倒なのであると便利。
あったら便利だけど買わなくていいもの
・ターンテーブル
たいていはスキャナに付属しているため。無ければ無いで適当なお皿を手で少しずつ回転させればいいです。
・3Dスキャン専用スプレー(AESUBとか)
制汗スプレーとかファンデーションとか最悪は小麦粉で代用できるため。
細かい粉が均一についていればよいのです。
・ギヤ雲台
精密なスキャンをやりたいならあったほうがいいです。なくてもカメラ用3脚の雲台でぜんぜんOK。
無理にとは言わないけど大切なもの
・高性能PC
3Dスキャンしたあとのデータは激烈に重く、安価なPCではまともに扱えないため高性能PCが必要です。データが重いからといってスキャンデータを軽くすると経常が荒くなるので3Dスキャナの性能を無駄にすることになります。もったいないためPC側で対処するのを私はお勧めします。
具体的には①メモリ(RAM)②CPUの順でお金をかけましょう。グラボ(GPU)はべつになかったらなかったていいです。
メモリは15GBくらい簡単に食われます。なので最低ラインとしてメモリ16GB以上のPCが必要です。32GBくらい推奨。なんなら64GBでも足りない場面があるので私はさらに増設を考えているくらいです。
CPUは強ければ強いほどよいです。スキャン作業中に恩恵はありませんが、点融合やメッシュ化処理でCPUをバリバリ使うためCPUが強ければ強いほど処理待ちの時間が減り、快適な3Dスキャナライフを送ることができます。予算の許す限り強いCPUが乗ったPCを買ってください。
予算が無い場合は処理待ちの時間で家事や体操をするなどして健康に暮らしてください。
GPUは計算に使われないし描画負荷も低いからなんでもいいです。

まとめ
・3Dスキャナーは光を使ってスキャンしている。
・撮れるサイズは手のひらサイズから乗用車くらいまで。
・凸凹を使って3D形状の位置合わせをしている。
・位置合わせの基準になる凸凹がなくなるとヤバい。
・広く映して凸凹をたくさん写したほうがいいけど解像度が落ちる。
・小物から中・大型までカバーするスキャナは無い。
・3Dスキャンしたあと専用ソフトで後処理が必要。
・後処理がPCの処理能力をバカ食いするぞ。
PCは高性能であればあるほど快適だぞ。