
【スマート農業】カメラで果実の糖度を測定できる?

はじめに
果実の糖度
甘い果物はおいしい。スーパーに行くと糖度〇〇度以上!と書かれたミカンやイチゴが並んでいる。僕は甘いほうが好きなので同じ値段であればできるだけ甘いものを選んでいる(一番安いやつを選ぶと糖度は表示されていないことがほとんどだが・・・)。一般に果物の糖度はBrixという値で示される。これは光の屈折率を見ているもので,固形物が多いと値が大きくなる。したがって糖以外の固形物が多くてもBrix値が高くなるため,厳密にいうとBrix値が高い=甘いではない。しかし,ここでは難しいことは抜きにして糖度が高い=Brix値が高い=甘くて美味しいと想像しながら読んでほしい。
収穫前に糖度がわかるとうれしい
生産者は収穫前に糖度がわかるとうれしい。熟れた時期が見極められ最も高く果実を売れるからだ。僕も家庭菜園でトマトを育てているときは真っ赤に売れた果実だけを収穫したい。たまに上が緑色のトマトが食卓に並ぶと少しだけがっかりする。さて,収穫適期を見極めるために通常はこれまでの傾向を参考にしたりサンプリングをしたりする。サンプリングとは果実をもぎ取り果汁を絞って糖度計にかける作業だ。ところで,ワイン用ブドウはこのサンプリングを特に念入りに行う。良いワインは良いブドウからと言われており,糖度の高さが発酵段階において重要となるのだ。良質のワインは非常に高く売れるためお金をかけても申し分ない。それゆえに多いところでは収穫前に数回以上もサンプリングを行い緻密にデータを集めている。このサンプリング作業は人海戦術で行われており,本場のヨーロッパでは特に多くの労働力が投入されている。ちなみに世界で最も生産量の多い果実はワイン用ブドウである。ワインがいかに世界で愛されているのかわかる。

果汁を絞らずに糖度を測れる
糖度を測るときにいちいち果汁を絞るのは面倒くさいし,1個ムダにしてしまう。どうせ1個ムダにするなら機器でなく食べて計測してしまいたい。そんな人のために果汁を絞らなくてもよい技術が発展している。非破壊計測と呼ばれ注目されている技術だ。ATAGO社は果実を絞らずともくっつけるだけで糖度を測定できるセンサを開発した。果実表面の”色”と糖度に相関があることが分かっており,事前に色と糖度の回帰式を作成しておくことで色から糖度を推定できるのだ。ATAGO社の計測器では特定の”色”の光を照射し,はね返ってきた光の量を計測している。

カメラで糖度を測れるか?
なるほど,光の反射から糖度がわかるのは便利だ。それならもはや果実をくっつけなくても,カメラで果実の写真を撮れば糖度がわかるのではないか?
そうすれば,
労働力の削減
サンプリングよりも広範囲のデータ取得
が可能であり良質なワインが作れるのではないか。そう考えた研究者らは実際に果樹園の果実をカメラで撮影して糖度を推定する実験を始めた。だが実はコレ,そんなに簡単ではない。今回は収穫前に糖度を推定する難しさについて最新の研究動向を交えて見ていこう。
スペクトルカメラの利用
目に見えない光を活用する
果実の”色”と糖度に相関があると言った。色といったが実は目に見える光よりも赤外線などの目に見えない光のほうが植物の状態を知るうえで有効であることがわかっている。通常のカメラは人間の見える光に合わせて赤(R)・緑(G)・青(B)を感知して写真を作っているのでRGBカメラとも呼ばれる。一方でRGB以外の光を感知できるカメラはスペクトルカメラと呼ばれスマート農業で特に注目されている。

ブドウ果実の糖度を知る
実験室でブドウ果実にハロゲンライトを照射し,スペクトルカメラで撮影した実験がある(Fernandes et al., 2015)。240粒の果実を利用し,なんと糖度0.95°の精度で推定することができたのだ。感覚的にかなり精度が良いと思う。ちなみに彼らはpHとアントシアニン量も同時にスペクトルカメラから推定しており,いずれも良い結果が出ている。
ところで,データを利用した推定の難しいところは汎化性だ。上述のFernandes et al., 2015ではその年に取った果実のスペクトル画像を利用してモデル(回帰式)を作り,その年の果実の推定を行った。でも実際,毎年モデル作成のためにデータ収集を行うのはとても面倒である。そこで,次年度以降でもモデルが使えるかどうか試した実験も行われている(Gomes et al., 2017)。彼らは2012年に取得したデータで2013年の果実の糖度を推定したところ,ニューラルネットワークを利用した回帰手法で糖度1.34°の精度で推定できた。ちなみに2012年のデータでは糖度0.96°の精度だったため,やはり少しばかり精度は劣る。しかし,年をまたぐと生育や撮影角度などにばらつきが出るため,違う年の果実を糖度1.34°で推定できたことは大きな前進といえる。

屋外という難しさ
ここまで来ると収穫前に農場に向かいスペクトルカメラで撮影すれば糖度が簡単にわかる気がしてくる。収穫期のワイナリーへ向かい撮影してみたい気持ちに駆られる。だが,大抵はうまくいかない。
ATAGO社の計測器は特定の波長の光を物体に照射することでその反射光を見ている。前述の屋内実験ではハロゲンライトを均一に設置することで安定した光源を確保している。一方で,屋外の光源は太陽光が基本である。しかし,太陽光は意外と不安定なのだ。画像は光の反射を感知することで作られる。すなわち,光源の性質が変われば反射する光の性質も変わってくる。太陽光を光源とする場合,厄介だ。例えば,ある日に取った画像は曇り,次の日は晴れだった場合,両者を同じデータとして扱うことは難しい。同じ性質を示している果実でも異なる画像が取れてしまう。
違う日ではなくとも時間経過により太陽光は動いてゆく。1日の太陽光の性質の変化を1時間ごとに記録した実験がある(Yamasaki et al., 2021)。晴れの場合10時~15時はほとんど変化がなかったが,15時以降は性質が変わってゆくという結果が見られた。また,太陽だけでなく雲も動く。午前は晴れだったのに午後は曇り,なんてことは日常茶飯事だ。この場合も午前と午後のデータはまるで異なる性質のものになってしまう。
太陽への対処法
さて,ここまでで屋外でカメラを使って果実の糖度を推定することは容易ではないことがわかった。じゃあ,無理なので止めよう,とはならないのが研究者の神髄だ。どうにかして不安定な太陽光も活用しようと工夫を凝らしている。
一番簡単なのは時間帯と天気を決めてしまうことだ。晴れの日の10:30~12:00しか撮影しない,と決めてブドウ園で撮影した研究がある(Benelli, 2021)。ただしこの手法は10:30~12:00は必ず晴天である必要があるため,地域によっては非常に難しい。晴天日を待っていたら収穫適期を逃してしまった,なんてことも起こりうる。前述のとおり太陽光の性質は晴天であれば10:00~15:00くらいは安定している。しかし,午前と午後では太陽の位置が大きく移動する。ワイン用ブドウのように垣根仕立ての場合,太陽の当たり方によっては大きな影が生まれてしまうため,撮影時間帯は極力絞らないといけない。この研究のように1時間半が限度だろう。これでは広範囲のデータ取得が難しいことは簡単に想像いただけるだろう。

糖度の推定ではないが,スペクトルカメラを用いてブドウの葉を撮影し品種分類した研究がある(Gutiérrez et al., 2018)。彼らは撮影前に標準白色板と呼ばれる白い板を撮影することで入射光を補正している。標準白色版は全ての光を均一に反射する性質を持っているため,標準白色板を撮影すれば光源の性質を知ることができる。果実の撮影日ごとに標準白色板を撮影することで光源のばらつきを把握し補正できるという寸法だ。この手法は広く用いられていて有名である。近年盛んなドローンによる空撮も事前に標準白色版を撮影することがほとんどだ。ただしこの手法も撮影中に天気が変わった場合は対応できない。


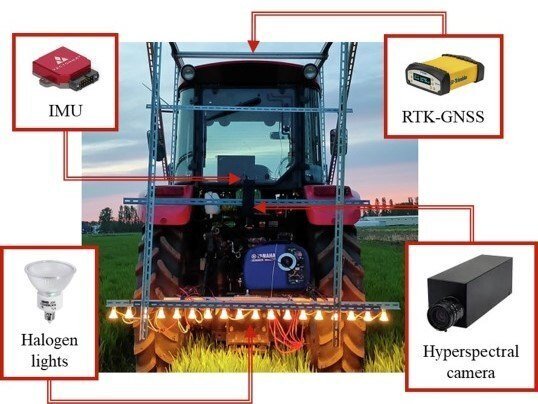
広範囲のフィールドデータを集めたい場合,撮影するのに時間がかかる。1日中晴天の日であればいいが,なかなか天気は人間の思うようにはならない。では,いっそ太陽に頼るのをやめよう。屋内と同じように人工照明を利用して夜間に撮影を行った研究がある(Yamasaki et al., 2022)。これまで夜間にデータ収集を行うことは考えられなかった。誰が撮影するのだという話になるからだ。夜,人間は眠りたい。しかし近年,ロボットトラクタなど自動運転技術の発展によりデータ収集を自動で行うことが可能となってきている。こうしたロボットはスカウティングロボットなどと呼ばれ注目を集めている。スカウティングロボットであれば昼夜問わず稼働できる。暗くても運転精度は変わらない。雨さえ降っていなければ広範囲のフィールド情報を集めることができる。さらには昼間の作業とバッティングすることもない。良いことづくしだ。ただし,夜間は本当に暗いため光源はちゃんと準備しないといけない。電気代がかかることが玉にキズだ。
どのようにデータを集めるか
少し脱線したので話を戻すと,収穫前にカメラで果実を撮影して糖度を推定しようとすると,太陽光をうまく処理しないといけないことがわかった。そのためには,
時間帯を限定する
標準白色版を事前に撮影する
夜間に撮影する
という対処法が考えられている。ブドウに限っていえば,1つのワイナリーでは多数の品種を栽培していることが多く異なる品種ごとにデータが必要となる。同じ品種であっても畑が広い場合は熟すタイミングが微妙に変わってくる。結局,広範囲を撮影しないといけないため,1度にたくさんの労働力が必要となる。やはりスカウティングロボットなどと呼ばれるロボットによる撮影で労働力を補完する必要がありそうだ。多数のロボットを同時に使えば時間帯が限定されていてもこなすことができる。標準白色版の撮影という手間のかかる作業もロボットに自動化してもらおう。夜間に関してはロボットでないと成り立たない。こうした発想から世界各地でロボットによるデータ収集プラットフォームの研究が進められている。一例として,果樹園用ではないが,シドニー大学でLadybirdと名付けられたスカウティングロボットが開発されている(Underwood et al., 2017)。近い将来,トラクタではなくこうしたデータ取集用のロボットが畑を見回りしている風景が日常になるかもしれない。

まとめ
果実は光の反射を利用して糖度を推定することができる
屋内実験ではスペクトルカメラを利用して平均誤差1°以下で糖度推定が可能である
果樹園でスペクトルカメラを利用する場合,太陽光をうまく処理しないと推定することが難しい
太陽光の処理には,時間帯を限定する・標準白色板を利用する・夜間に撮影する,などの対策がある
果樹園で収穫前にスペクトルカメラを使って糖度を推定することは研究段階である
スペクトルカメラを使って果樹園のデータを収集する際にはロボットの活用が効果的である
参考文献
HP
論文
https://doi.org/10.1002/rob.21728
おわりに
もしもこの記事に興味を持ち,僕の研究・執筆活動を応援してくれる方は以下の記事を購入していただけると励みになります。自己紹介を兼ねて思うことを色々書き連ねるページとなっています。