下腿義足:前方の不安定感1(膝折感)<練習問題解説>

※この記事は下記ふたつの記事を読んでいることを前提としています.読んでいない方はぜひ!
🔥義足の適合調整の最大のポイントは🔥
原因を特定するために,質問を重ねて状況証拠を増やすことです!!!
TT-FittingGAMEでも,適切な作業と同時に
適切な質問📝
がハイスコアのカギです!
以下の2つの評価指数から,最終スコアが決まります.
作業指数:行った調整の適格度を表す指数.義足ユーザーが訴える不適合現象を改善する調整を行うと上昇する.
質問指数:行った質問の適格度を表す指数.義足ユーザーが訴える不適合現象の原因と結びつきの強い内容を質問すると上昇する.
※質問は1ターンにつき3回できるので,この3回はできるだけ使い切るようにしましょう.質問回数が少ないと質問指数が下がります↘️
さあ!練習問題をスタートです!
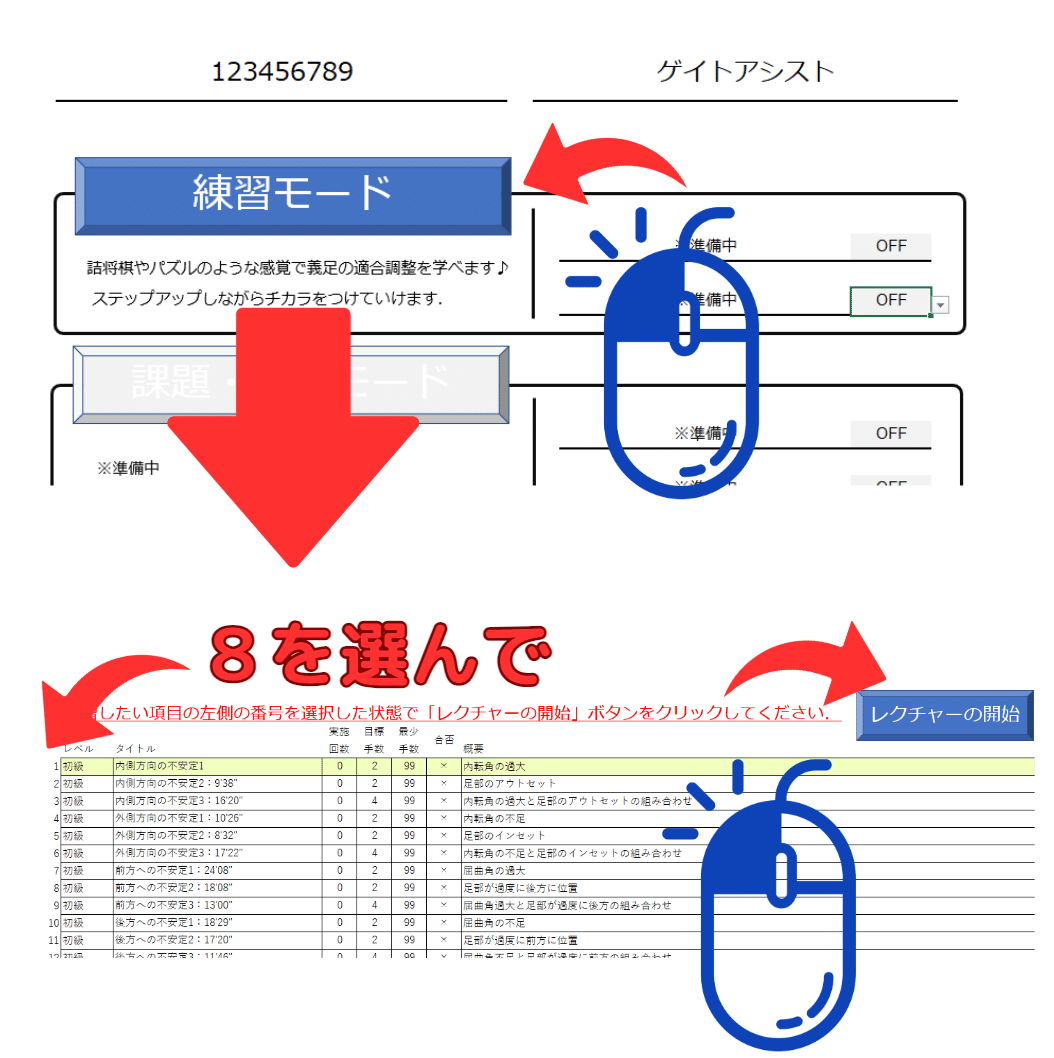
TT-FittingGAMEを起動して「練習モード」→8番,前方の不安定感1を選んでスタートしてください.

⚠️ランダムに問題が生成されるため,ここから先はみなさんと同じとは限りません⚠️
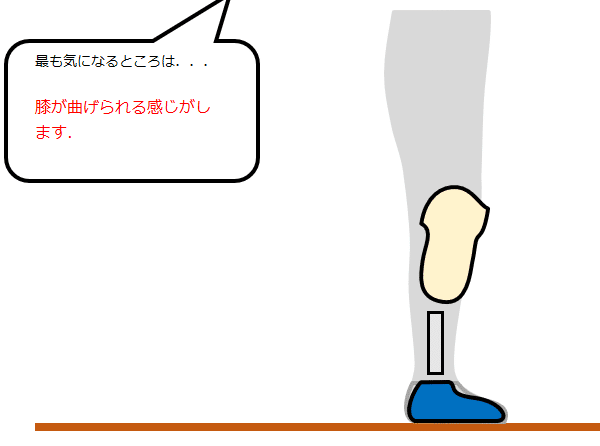
義足ユーザーは膝折感や膝が曲げられる感じ,足底の踵接地感を訴えるはずです.
<主訴(現象)>:膝が曲げられる感じが強い
ひとつの現象に対して,それを生じさせている原因の候補は複数であることが多いです.はじめのうちはなかなか覚えられないと思います💦
下記リンクから不適合現象と原因の対照表を入手して取り組みましょう!
対照表から「膝曲げ感」「膝折感」の原因として候補となるのは
屈曲角の過大
足部が過度に後方
後壁が低い(主にダイナミックアライメント:歩行時)
これら3つが考えられます.原因の候補についてひとつずつチェックしていきたいと思いますが,矢状面のアライメントについては立ち方のパターンが2つあることに注意しましょう.
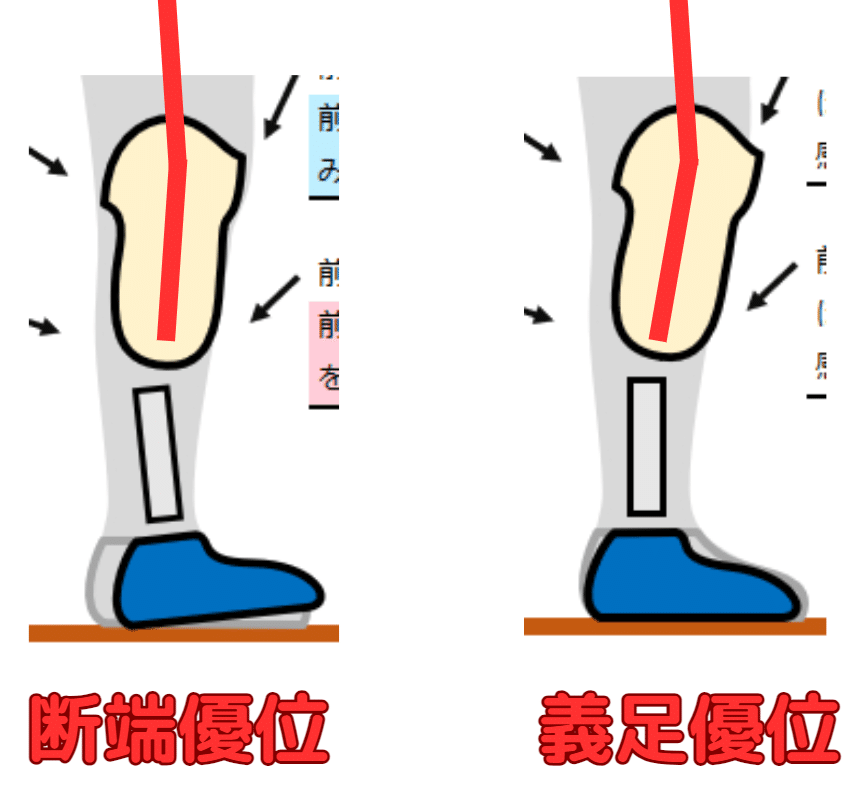
<断端優位>
義足ソケットの角度に従わずユーザーの持っている断端の角度を優先した立ち方です.ソケットの角度不適合が足底の接地状況等に現れます.
<義足優位>
義足ソケットの角度に合わせてユーザーがが膝の屈曲角を調整する立ち方です.ソケットの角度不適合が足底の接地状況には現れません.
→多くの場合,義足ユーザーは不快感の少ない「義足優位」で立ちます.
ポイント!
義足優位の立ち方は足底の接地状況等によってソケットの角度の不適合を判断できないので,断端優位の立ち方に誘導することが重要!
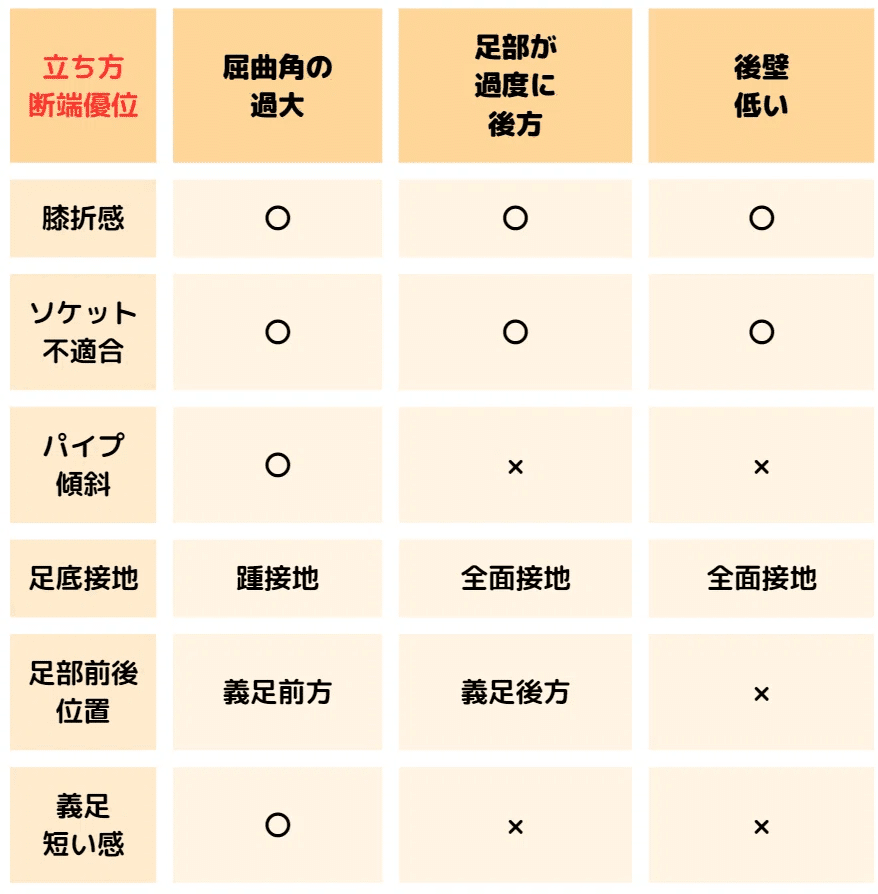
対照表から断端優位時の膝折れに関連する原因と現象の関係をまとめました.後壁が低い,という原因候補もあるのですが,ここでは屈曲角と足部の位置の鑑別方法について説明します.
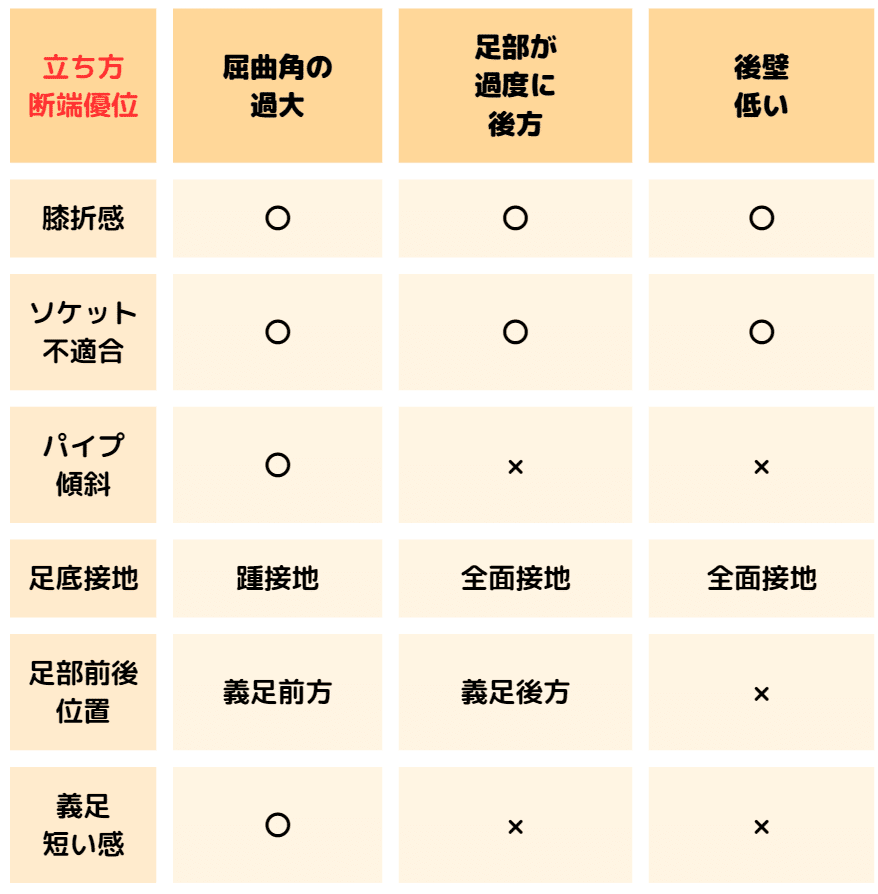
断端優位で立つと
パイプの傾斜
足底の接地状況
足部の位置
義足長の短い感
について,屈曲角過大と足部が過度に後方では違いがあるので,鑑別しやすいと思います.
しかし上で書いたとおり,義足ユーザーは不快感の少ない「義足優位」で立ちます.
そこで対照表では書かれていませんが,義足優位時の膝折れ関連の原因と現象の関係をまとめました.

ポイントは
ソケット不適合の有無
義足長が短い感
といった違いはあるものの,目視やユーザーの感覚としてわかりやすい
パイプの傾斜
足底接地
足部の前後位置
による違いが無いということです.
実際にTT-Fitting Gameでも多くの場合は義足優位で立つはずです.
質問①として,足底の接地状況を確認しても(見た目からもわかる通り)問題ないと答えると思います.

この状態では,後方不安定の原因が<屈曲角の過大>によるのか<足部が過度に後方>によるのか,わかりません💦
そこで
同じ膝折れ感を生じさせる屈曲角の過大と足部が過度に後方において,現象の違いが多く出る断端優位の立ち方に誘導することで良い判断ができそうです!
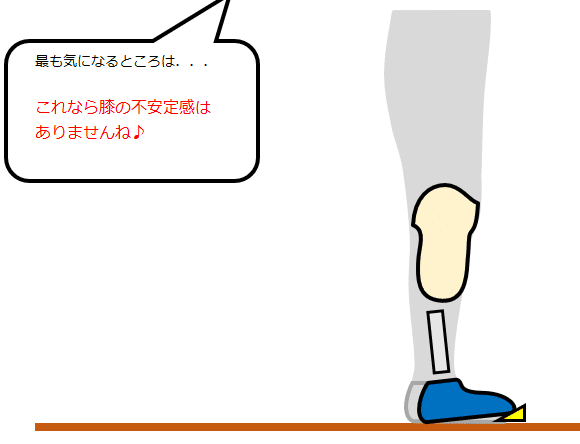
🔥原因が屈曲角過大だと仮定して,断端優位で立つ場合,つま先が浮いてくることに着目しましょう♪🔥
そこで「矢状面の仮調整,立ち方指定」の「前足部底面に挿入」でウェッジを挿入してみましょう!

すると,断端優位の立ち方になると同時に「膝の不安定感が無い」とのコメントが得られました!
ゲーム上では,この状態で足底の接地状況等を確認することはできませんが
パイプの傾斜
足底接地
足部の前後位置
が断端優位での屈曲角過大における不適合現象と一致することがわかります.
よって今回の主訴(現象)
膝の曲げられ感が強い,膝折れ感が強い
の原因は
🔥屈曲角の過大🔥
であると特定できました!
念のため質問②③として,ソケット適合や義足長感を確認しましょう.
※ハイスコアを出すためには質問回数はフルに使いましょう!
では,調整してみましょう!
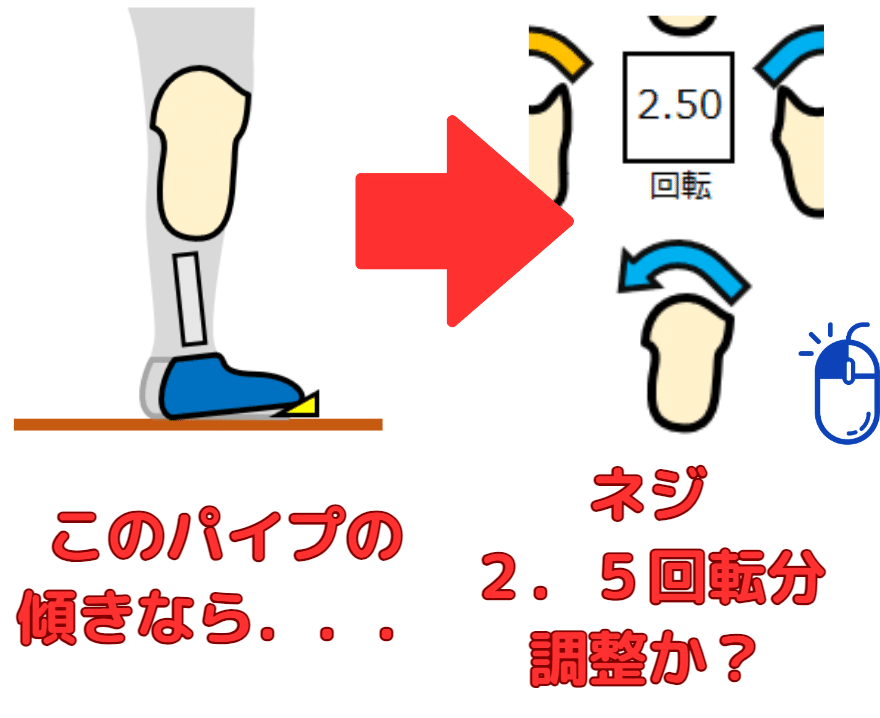
筆者はこのパイプの傾きであれば,クランプアダプタのネジ2.5回転分ほどの調整で良いと考えました.
実際の義足の調整において,このような感覚は重要です.
「このパイプの傾きならこれくらいの調整」
「この程度の不安定感なら,これくらい足部を移動させる」
といった感覚です.これらを養っていくことで調整量の精度が上がっていき,作業効率がアップします♪
クランプアダプタのネジ調整について知りたい方は下の記事をご覧ください!
ネジ2.5回転分の調整をおこなうと
逆に「後方への不安定感」が出てしましました💦

2.5回転屈曲角を減らすのは多すぎたようです💦