
『歩行分析の教科書』2023

🔻こちらは下記noteの2023年に加筆したアップデート版となります🔻
追記情報
2023/1/25 「脳卒中片麻痺者の歩行パターンと特徴」を追加
文章再構成
歩行周期
歩行周期とは
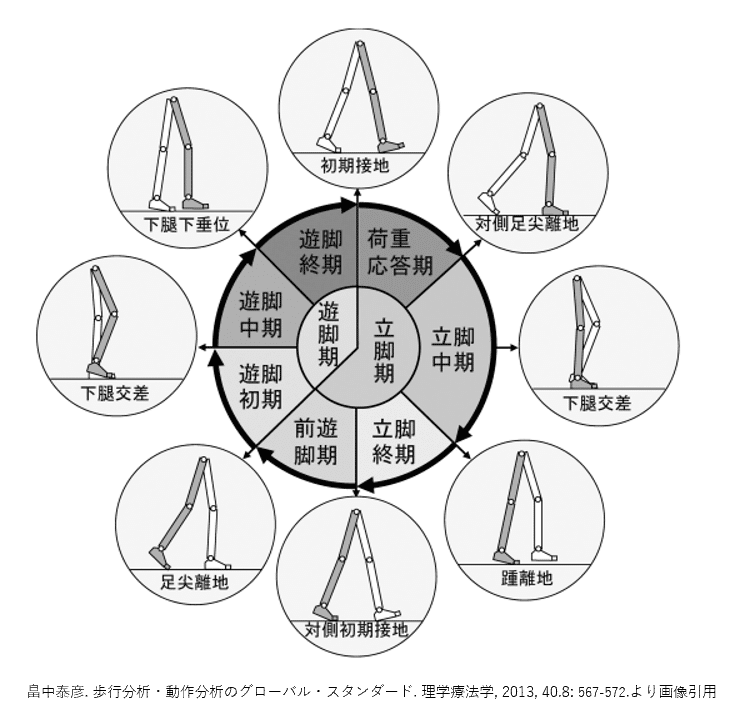
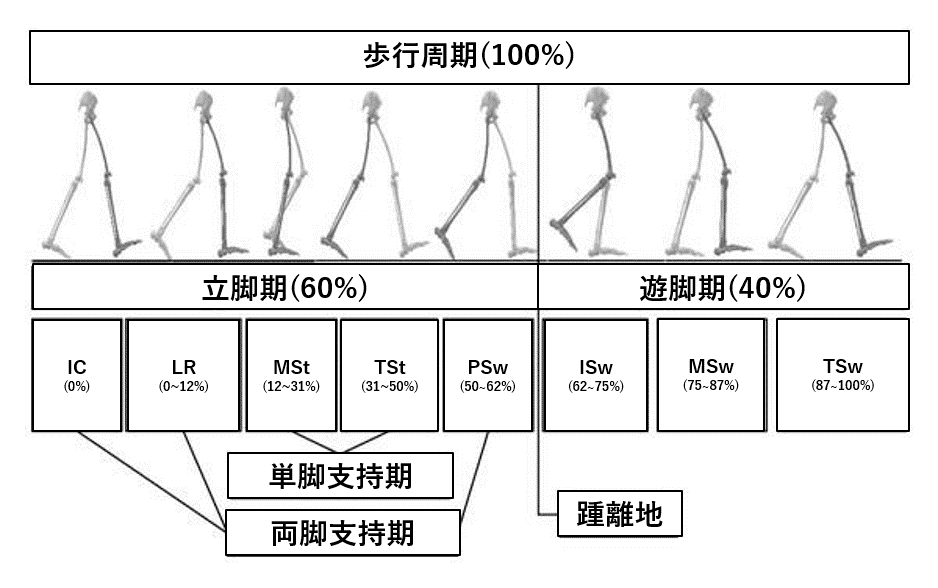
歩行周期は、同側の足の初期接地から次の初期接地まで¹⁾と定義されます。
歩行周期において、立脚期は60%、遊脚期は40%を占めます。
立脚期には、初期接地(initial contact:以下IC)、荷重応答期(loading response:以下LR)、立脚中期(mid stance:以下Mst)、立脚後期(terminal stance:以下Tst)、前遊脚期(pre-swing:以下PSw)の5期があります。このうち、初期接地と荷重応答期は1回目の両脚支持期、前遊脚期は2回目の両脚支持期になります。立脚中期と立脚後期は単脚支持期になります。
遊脚期には、遊脚初期(initial swing:以下ISw)、遊脚中期(mid swing:以下MSw)、遊脚後期(terminal swing:以下TSw)の3期があります。
歩行周期における各相の定義と役割

立脚期

IC
脚が地面に接触する瞬間
【役割】立脚期をヒールロッカーのポジションで開始すること

LR
初期接地~反対側の脚が地面から離れた瞬間
【役割】衝撃吸収、荷重を受け継ぎ安定性を確保、前方への動きのキープ

MSt
反対側の脚が地面から離れた瞬間~観察脚の踵が床から離れた瞬間
【役割】観察脚を支点とした前方への動き、脚と体幹の安定性確保

TSt
観察脚の踵が床から離れた瞬間~反対側のIC
【役割】身体を観察脚より前へ運ぶこと

PSw
反対側のIC~観察脚のつま先が床から離れた瞬間
【役割】ISwへの準備
遊脚期

ISw
観察脚の踵が床から離れた瞬間~両側の下腿が矢状面で交差した瞬間
【役割】床から脚を離すこと、観察脚を前に運ぶこと

MSw
両側の下腿が矢状面で交差した瞬間~観察脚の下腿が床に対して直角な瞬間
【役割】観察脚を前に運ぶこと、トゥクリアランスの確保

TSw
観察脚の下腿が床に対して直角な瞬間~IC
【役割】観察脚の立脚準備
正常歩行
正常歩行における各相の関節角度

文献1,2)を参考に作成(※ズーム推奨🔍)
【臨床応用のポイント】
正常歩行に必要な関節可動域が獲得されていなければ代償動作が生じると解釈することができます。
例えば、TStで必要とされる足関節背屈関節角度10°の可動域を獲得できていないケースでは、骨盤の後方回旋が強調され代償していることが臨床ではよくみられます。
観察される跛行(異常運動)とその相で必要とされる関節角度を照らし合わせて臨床推論をしてみましょう。
※あくまで正常歩行における各関節の関節角度は平均値であり、個体差を考慮する必要があります。
正常歩行にみる3つのロッカー機能(heel rocker)

heel rockerは、踵を回転軸の中心とした制御機構です。その役割は、IC~LRでの重心の落下に対する衝撃吸収です。主に前脛骨筋や大腿四頭筋の遠心性収縮によって制御されます。
正常歩行にみる3つのロッカー機能(ankle rocker)

ankle rockerは、足関節を回転軸の中心とした制御機構です。その役割は、重心を上昇させるためのアクセルと前方への回転に対するブレーキです。前方への回転に対するブレーキは、主にヒラメ筋の遠心性収縮によって制御されます。
正常歩行にみる3つのロッカー機能(forefoot rocker)

forefoot rockerは、回転軸の中心を足関節からMTP関節へ移動させて行う制御機構です。その役割は、前方への強い推進力と重心の下降を緩やかにする(ステップ長の確保)ことです。強力な腓腹筋の筋力が必要であり、最大筋力の60~80%を使っている²⁾とされています。
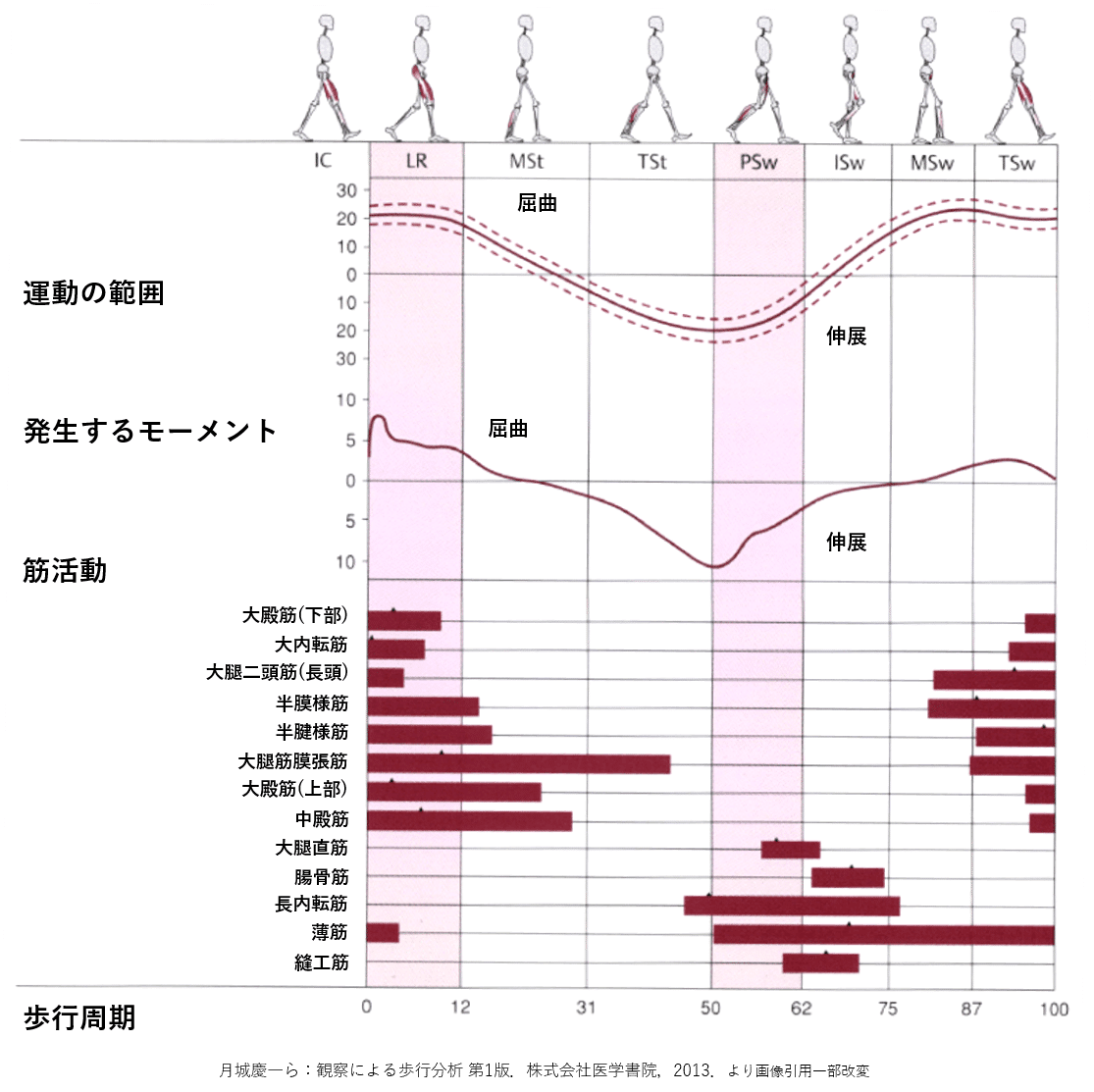
歩行周期と下肢筋活動
股関節のモーメントと筋活動
ここから先は
¥ 800
サポートいただいた分は、セラピストの活躍の場を創ることに還元させていただきます。よろしくお願いします。