
BEST HIT AFO

久々の前の続きを。
歩行に関する研究の紹介ばかりだが、時間が空けばコロナに関連したPICS、人工呼吸器のリハビリテーション治療を紹介したい。(それかAI関連)

下肢装具には様々なsubtypeが存在する。Subtypeは動力源の有無によって分類され、底屈および背屈方向に駆動するものをActive AFOと呼ぶ。一般的に、底屈トルクはとても大きく動力源の確保が難しいとされる。先行研究では外骨格型(Exoskelental)が片麻痺歩行にどのような影響を与えるのか検証されている。

Active AFOの効果の検証が近年行われている。McCainらはSoleus EMGとPropulsion Forceを底屈AssistのTriggerとして採用し、研究を行った。脳卒中片麻痺患者6名に対し、底屈補助の即時的効果を検証した。快適歩行速度から徐々に歩行速度をTreadmillにて向上させ、3次元歩行解析および歩行効率(酸素消費量等)の変化を解析した。

結果としてAssistによって麻痺側足関節底屈パワーが増加しただけでなく、歩行速度の向上によっても底屈パワーは増加した。

麻痺側足関節底屈パワーはほとんどの歩行速度において有意に増加した。しかし、その他関節では底屈Assistによる大きな変化は認めなかった。
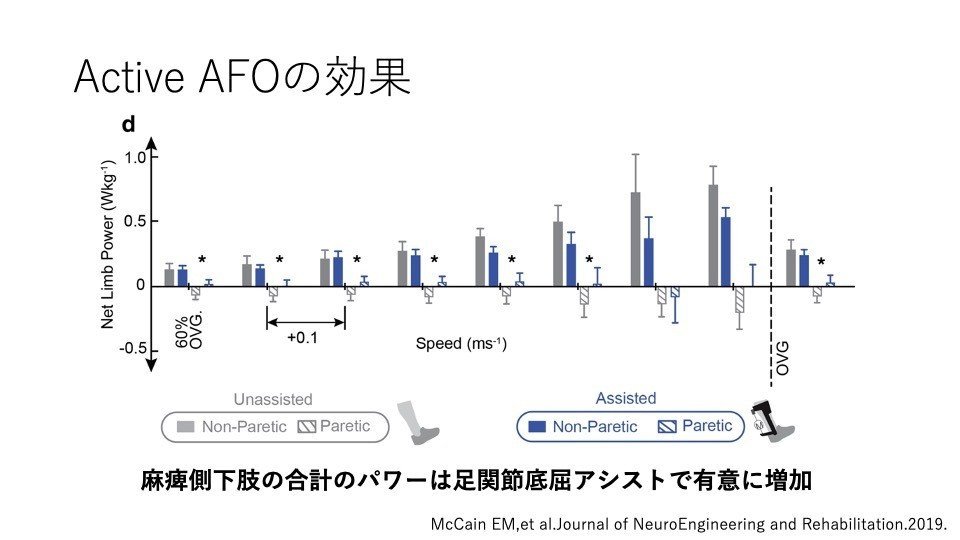
底屈アシストは麻痺側下肢に伝わる合計のパワー(Net Limb Power)を、有意に増加させた。非麻痺側下肢では有意差を認めなかった。

麻痺側底屈Assistは代謝指標(Metabolic Cost)および合計の歩行距離に影響を及ぼさなかった。

筆者は、代謝指標が改善しなかった原因は、Assistが麻痺側の床反力垂直成分を増加させ、麻痺側前方推進力を減少させたためだと考察している。

更に、麻痺側足関節底屈Assistは麻痺側下肢伸展角の指標とされるTrailing Limb Angleを減少させた。このことは底屈Assistが麻痺側垂直成分を増加させ、麻痺側前方推進力の増加に貢献しなかったことを支持している。最後に筆者は、Limitationの中で、麻痺側下肢伸展を促す視覚や口頭によるFeedbackを付与しなかったことおよび、1分間毎に歩行速度を向上させたため、速度に適応するまでの時間が短かったことが麻痺側推進力増加を妨げたと主張している。

もう一つの足関節Robot(正確にはDynamic AFOではない)Anklebotの効果を検証した研究がある。Forresterらは慢性期脳卒中片麻痺患者対し、歩行での足関節底背屈Assistが座位での足関節底背屈Assistより有効であるかRCTにて検証した。介入前後およびFollow-upとして6週後の測定を行った。

Primary Outcomeは歩行速度とし、Secondary Outcomeとして、麻痺側単脚支持期および麻痺側前後床反力成分の合計とした。
結果としてAnklebotは歩行速度、麻痺側前後床反力成分および単脚立脚期を訓練直後には増加させなかった。しかし、6週後のfollow-up時に座位より有意にそれらの指標を増加させた。

筆者は、足関節Robotによる課題特異的訓練(Task-Specific Training)は生活の中で汎化し、利用され、機能改善が見込まれる可能性を主張した。また、麻痺側遊脚期の足関節角度は訓練回数に応じて改善するが、そのLearning Curveは個人によって異なることも主張した。

Texas UnivのBowdenらはこの治療効果による違い、奏功群(Responder)、抵抗群(No-Responder)の特徴分析を行った。慢性期脳卒中片麻痺患者に対し、Locomotive Gait trainingを行い、臨床的最小可変効果量(Minimal Clinically Important Difference:MCID)を上回った群とそうでない群を比較した。
上記の対象者に対し、BWSTTおよびOvergroundでのGait Trainingを実施した。

OutcomeとしてMotor Control、Balance、Functional Walking AbilityおよびEnduranceの項目に分け、各々評価を行った。

グループ全体でGait trainingは歩行速度および6MWTを改善させた。また⊿Paretic Propulsionと⊿Self Selected Walking Speedにおいて負の相関を認めた。

Responder群において、Gait trainingは歩行速度、BBS、DGI、ABCおよびFMAを有意に改善させた。しかし、Paretic Propulsionを減少させた。以上より、非麻痺側に代償戦略(Compensation Strategy)により歩行速度等を改善させた可能性がある。

Non-Responder群ではSelf Selected Walking Speedおよび6MWTが有意に改善した。加えて、⊿Self Selected Walking Speedと⊿Paretic Propulsionにおいて負の相関を認めた。

筆者は、Non-Responder群においてGait TrainingはParetic Propulsionを増加させるが歩行速度はそれに伴い減少する傾向にあったと報告した。このことは麻痺側下肢の学習性不使用(Learn disuse)および非麻痺側での代償動作によって歩行速度を改善させた可能性があり、歩行速度は片麻痺患者の神経学的回復を示す指標になりえないと結論づけている。加えて、長谷は歩行再建においてNon-Responderが存在する理由は適切なSynergyを誘導できていないことにあると主張している。

結論として、下肢装具は歩行再建を促す小型ロボットとなり得る。
下肢装具の自由度の制限を解除する手続きが歩行再建の過程となる。
運動学習において適切なSynergyの誘導、適切なFeedbackがNon-Responderを減少させる鍵となる。
終わり。
延期になりましたが今年の日本リハビリテーション医学会学術集会でも装具の関する演題を提出しているので、発表後ここにも掲載します。
質問あればぜひ。
この記事が気に入ったらサポートをしてみませんか?