
シグマのQuattroシリーズの誤解のいくつか

sd Quattroが発売されシグマのカメラが最近話題になってますが、ネットの情報を見てるとちょっとコレ違うなーってのがありまして、その中で自分が説明できそうな所を書き連ねてみます。
![]()
3900万画素の意味
sd Quattroの説明文には「APS-Cサイズながら、3,900万画素相当の驚異的な高画質」との謳い文句が踊っています。さてこの「3900万画素」とは?
ここでよく誤解されているのが「Foveonの総画素数が3900万ある」です。これは間違い。
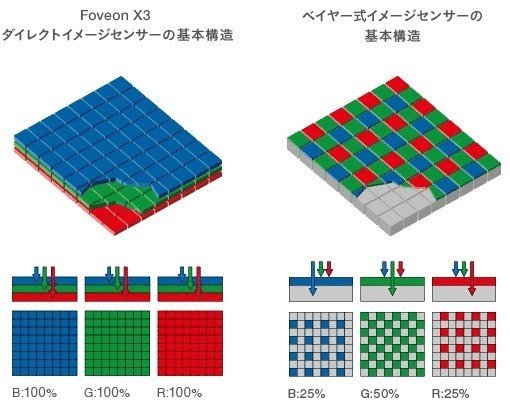
Foveonは一般的なベイヤーセンサーと違い、縦×横に加え垂直にも画素が配列されています。
こちらから画像を借用。。
Quattroは更に複雑になっていて、理由は割愛しますが2,3層めの画素が従来より大きくなっています。
それぞれの画素数は仕様のページに載っているんですが、上から
T: 5,440×3,616 / M: 2,720×1,808 / B: 2,720×1,808
です。ここから画素数を求めると:
T: 5,440×3,616=19,671,040
M: 2,720×1,808=4,917,760
B: 上に同じ
合計すると29,506,560となります。これも有効画素数として仕様に書いてますね。3900万には1000万ほど足りません。
次に「SUPER-HIの時の画素数」という意見。これも違います。確かにSUPER-HIという「RAWより大きいJPEG画像」で、アスペクト比3:2の場合の画素数は39,321,600になりますが、これはたまたま約3900万画素になっただけです。他のアスペクト比ではこうなりません。
正解は「輝度情報を取得出来る画素数が、ベイヤーセンサーの2倍だから」です。
上記1枚目を見ていただくと分かりやすいですが、一般的なベイヤーセンサーでは、輝度情報はG(緑)の画素から取得します。このGの画素数は総画素数の50%です。
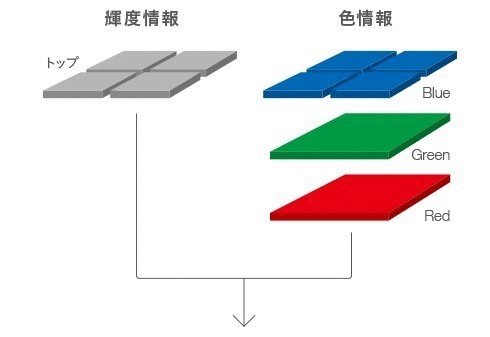
対してFoveonではトップ層の全ての画素から取得します(トップ層は輝度情報と青の色情報の2つを取得します)。つまり100%。ベイヤーセンサーの2倍ですね。
さてFoveonのトップ層の画素数は19,671,040です。これを2倍してみましょう。すると39,342,080となります。約3900万になりました。
つまりベイヤーセンサーで同じ解像度を出すなら3900万画素のセンサーが必要、という意味になります。しかしFoveonセンサーではトップ層の1950万画素(Quattroなら3層全てでも3000万画素)で同等の解像度を得られる、という訳です。
![]()
ベイヤー画像に変換している?
次に、某掲示板で書かれている「画像処理時にベイヤー変換されているから、結局ベイヤーの画像と同じでFoveonの意味は無い」という意見。
これはシグマが取っている特許情報が元になっています。
それがここにある3つの特許なのですが、確かにベイヤー変換処理を行っています。しかしながら、ちゃんと読むとそれだけではない事が分かります。
まず何故ベイヤー変換処理を行っているかを説明します。
QuattroのFoveonセンサーは約3000万の画素から成っており処理するのに時間がかかります。なのでベイヤー化する事で処理する画素数を減らして高速処理出来る様になっています。
次に、Foveonのセンサーは独自仕様のため、その画像処理も独自に開発しなくてはなりません。しかしそれだとコストが跳ね上がり、商品価格が高くなってしまいます。しかしながら世の中にはベイヤー処理チップが普及しており、これを使うことでコストダウンが計れます。
。。。うん、ここだけ読むと「えー。。。」ってなりますよねw。でも大丈夫:)
一つ一つみていきましょう。
これはおそらく、Quattroのカメラを用いてSUPER-HIでの記録時に行う画像の拡大処理の為の特許ですね。
確かにこの中でベイヤー変換処理を行っていますが、ベイヤー変換処理してそれをjpegにして終わり、ではありません。
まずFoveonセンサーから得た画像情報を元に色ずれを補正したデータを作ります。Foveonセンサーで得られた色はそのままだと色ずれが起こっていて、これを補正する必要があるらしいですね。この特許では段落0055で説明されています。これは一旦据え置き。
次にベイヤー画像になったデータにホワイトバランスやノイズ除去、ガンマ補正など、カメラで設定したモードに合わせて処理していきます。補間処理もここで行われます。
この次がちょっと違うところで、ベイヤー画像に色々な処理が施され、SUPHER-HIの為に画像が拡大され、そのせいで偽色が発生した後、先の色ずれを補正したデータを使って偽色を抑制します。(段落077)
某掲示板では「ベイヤー処理をしてFoveonの色ずれを補正する」様に書かれてますが、実際はベイヤー変換処理以前に既に色ずれは補正されていて、そのデータで「ベイヤー画像の拡大化で発生した偽色を補正」しているんですね。
こちらの特許は、JPEGで保存、またはカメラ内JPEG現像する際の画像処理特許の様です。大体の流れは上記の特許と同じです。というかこちらのほうがメインかもw。
ベイヤー変換処理した後、最後に前もってデータ化していたFoveonの100%の輝度情報と輪郭情報をベイヤー画像に合成し、解像感を復元、偽色やノイズを抑制している様です。
またこの特許では、カメラ内ビニングについても触れられています。将来はカメラ内ビニングが出来る様になるかもしれませんね:)
ベイヤーセンサーには基本的に偽色の原因を除去するローパスフィルタが付いています。しかしFoveonセンサーはローパスフィルタがそもそも必要ありません。
そこでベイヤー変換処理をする前に偽色の原因を除去する必要があるので、そのための装置である「デジタルローパスフィルタ」の特許の様です。しかもこのフィルタ、かけ具合を調整出来るようです。。。!
![]()
と、かなりざっくり書き出してみましたが、ベイヤー変換中の処理がやっぱり気になりますよね。さすがにここで何が行われてるのかまでは読み取れませんでした。
でも撮って出しのjpeg画像を見る限りこの処理は上手く行ってるんじゃないかと思います。
上記特許は全て「カメラ本体でJPEGに変換するため」の特許なので、どうしても気になるって方はPCのSigma Photo Proで現像すればまるっと回避出来ると思われます。
チップの都合なども無いのでもっとFoveonのデータをダイレクトに扱ってくれるんじゃないかな?
sd Quattroのマニュアルにも「より細かな調整が必要な場合はSIGMA Photo Proでの現像をおすすめします。」と書いてますし:)
しかし特許情報は理解するのが難しい反面、未来の技術を見てるようで面白いですね:) 今回はビニングがカメラ本体で出来る可能性が見いだせましたし、こういう発見があるのはいいですね!