M5StackCPlusでIMUドリフトをできるだけ抑えてBluetooth+Arduino+Unityと連携する

M5Stackシリーズで内臓センサを使ってp5やUnityと連携させたことのある方は多いかと思います。そこでyawの値が暴走する、いわゆる「ドリフト」が起こってしまうわけですが、それをできるだけ抑えてUnityのオブジェクトと連携させる方法をメモしました。Arduino経由でシリアル接続します。
M5Stack-Basicではこの方のやり方そのままで可能なようなのですが、私の手元のM5Stack-Basicでは内臓センサが壊れてるか何かで上手く動作できませんでした(この方のコード以外でも近い症状が出たので)。
そこで上記の方のコードを参考にして、M5StackCPlusで動くものを作ってみました。M5StackCPlusのセットアップはすでにできていることが前提です。
ライブラリを入れる
1.下記のリンクの「Code」をクリックして、「Download ZIP」を選択する
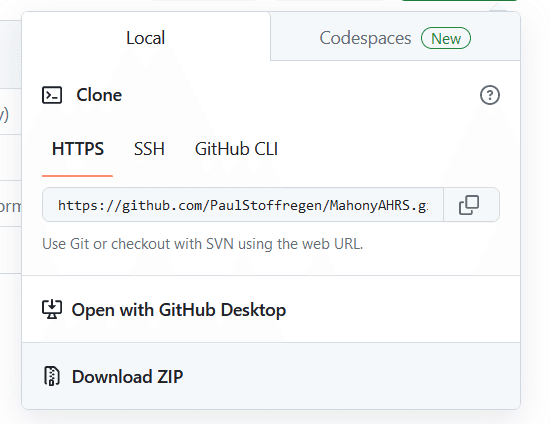
2.「スケッチ」→「ライブラリをインクルード」→「.ZIP形式のライブラリをインストール」を選択する

3.先ほどダウンロードしたZIPファイルを選択する
Arduino側のコード
M5StackCPlus+Arduinoのコードです。前述したMahonyAHRSのライブラリを入れていることが前提です。
下記のリンク先を参照させて頂きました。
M5StackCPlusをUSB接続した上で、ポート名もUSB接続のときのものにして書き込みします。
#define M5STACK_MPU6886
// #define M5STACK_MPU9250
// #define M5STACK_MPU6050
// #define M5STACK_200Q
#include <M5StickCPlus.h>
//[追加]MahonyAHRSupdateIMU()を呼べるようにするため
#include <utility/MahonyAHRS.h>
#include "BluetoothSerial.h"
float accX = 0.0F;
float accY = 0.0F;
float accZ = 0.0F;
float gyroX = 0.0F;
float gyroY = 0.0F;
float gyroZ = 0.0F;
float pitch = 0.0F;
float roll = 0.0F;
float yaw = 0.0F;
float temp = 0.0F;
//[追加]GyroZのデータを蓄積するための変数
float stockedGyroZs[10];
int stockCnt=0;
float adjustGyroZ=0;
int stockedGyroZLength=0;
BluetoothSerial bts;
// the setup routine runs once when M5Stack starts up
void setup(){
stockedGyroZLength=sizeof(stockedGyroZs)/sizeof(int);
// Initialize the M5Stack object
M5.begin();
/*
Power chip connected to gpio21, gpio22, I2C device
Set battery charging voltage and current
If used battery, please call this function in your project
*/
M5.IMU.Init();
M5.Lcd.setRotation(3);
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setTextColor(GREEN , BLACK);
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(80, 15); // set the cursor location. 设置光标位置
M5.Lcd.println("IMU TEST");
M5.Lcd.setCursor(30, 30);
M5.Lcd.println(" X Y Z");
M5.Lcd.setCursor(30, 70);
M5.Lcd.println(" Pitch Roll Yaw");
Serial.begin(9600); // Initialize serial communication at 9600 baud rate
bts.begin("M5Stack");//PC側で確認するときの名前
}
// the loop routine runs over and over again forever
void loop() {
// put your main code here, to run repeatedly:
M5.IMU.getGyroData(&gyroX,&gyroY,&gyroZ);
M5.IMU.getAccelData(&accX,&accY,&accZ);
//[変更]これは使わない
// M5.IMU.getAhrsData(&pitch,&roll,&yaw);
//[追加]起動時にstockedGyroZLengthの数だけデータを貯める
if(stockCnt<stockedGyroZLength){
stockedGyroZs[stockCnt]=gyroZ;
stockCnt++;
}else{
if(adjustGyroZ==0){
for(int i=0;i<stockedGyroZLength;i++){
adjustGyroZ+=stockedGyroZs[i]/stockedGyroZLength;
}
}
//貯めたデータの平均値を使ってgyroZを補正する
gyroZ-=adjustGyroZ;
//ここでaccelデータと補正したgyroデータを使ってpitch・roll・yawを計算する
MahonyAHRSupdateIMU(gyroX * DEG_TO_RAD, gyroY * DEG_TO_RAD, gyroZ * DEG_TO_RAD, accX, accY, accZ, &pitch, &roll, &yaw);
}
//ここから下は変更無し
M5.IMU.getTempData(&temp);
M5.Lcd.setCursor(30, 40);
M5.Lcd.printf("%6.2f %6.2f %6.2f ", gyroX, gyroY, gyroZ);
M5.Lcd.setCursor(170, 40);
M5.Lcd.print(" o/s");
M5.Lcd.setCursor(30, 50);
M5.Lcd.printf(" %5.2f %5.2f %5.2f ", accX, accY, accZ);
M5.Lcd.setCursor(170, 50);
M5.Lcd.print(" G");
M5.Lcd.setCursor(30, 80);
M5.Lcd.printf(" %5.2f %5.2f %5.2f ", pitch, roll, yaw);
M5.Lcd.setCursor(30, 95);
M5.Lcd.printf("Temperature : %.2f C", temp);
// Send the pitch, roll, yaw values to Unity over Serial
bts.print(pitch);
bts.print(",");
bts.print(roll);
bts.print(",");
bts.println(yaw);
delay(100);
}
Bluetoothのセットアップ
1.とりあえずM5StackCPlusをUSB接続した状態で、設定を開く
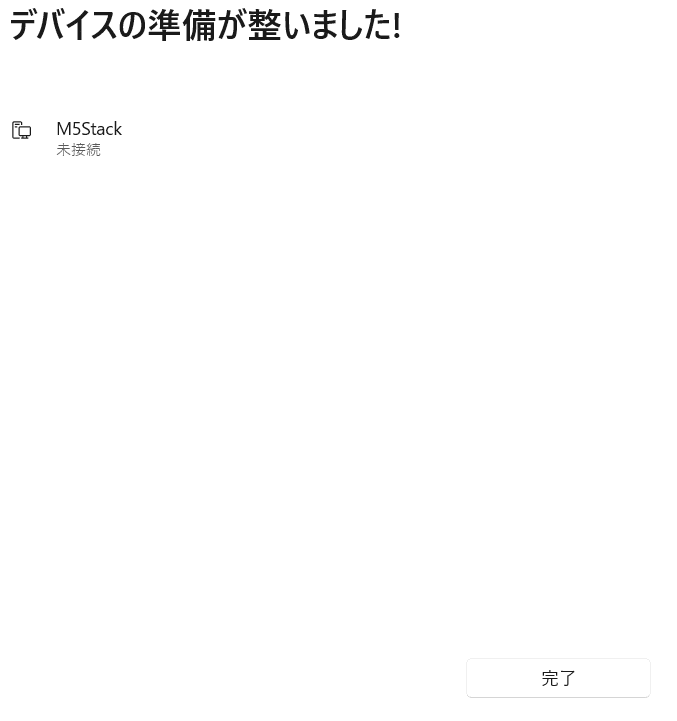
2.「デバイスの追加」をクリックし、「M5Stack」を選択する


2.下記の画面になったら「完了」を押して、ペアリングをする
3.デバイスマネージャの画面で下記のようになっていればOK。ポート名でいちばん大きいものが実際にArduinoやUnityで使うものとなる(この場合だと「COM8」)

4.ポート名を3.のものに変更し、「ツール」→「シリアルモニタ」でシリアルモニタを開く

5.値が出ていればOK
6.Arduinoのシリアルモニタを閉じる
Unityのセットアップ
下記のコードを3Dオブジェクトに適用し、M5StackCPlusを傾けるとオブジェクトも回転します。
なおインスペクタで使用するポート名を変更してください。
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using System.IO.Ports;
public class BTTusin_Rotation : MonoBehaviour
{
// Replace with your serial port name
public string portName = "COM8"; // Port name now public and changeable in Inspector
private SerialPort sp;
public float speed = 5.0f; // Speed of the rotation
private Quaternion targetRotation;
void Start()
{
sp = new SerialPort(portName, 9600);
if (!sp.IsOpen)
{
sp.Open(); // Open the serial port
sp.ReadTimeout = 50; // Set the timeout
}
targetRotation = transform.rotation;
}
void Update()
{
if (sp.IsOpen)
{
try
{
string value = sp.ReadLine(); // Read the information
string[] vec3 = value.Split(','); // Split it into an array
if (vec3.Length == 3) // If array length is 3
{
// Parse the values
float pitch = float.Parse(vec3[0]);
float roll = float.Parse(vec3[1]);
float yaw = float.Parse(vec3[2]);
// Set the target rotation
targetRotation = Quaternion.Euler(pitch, roll, yaw);
}
}
catch (System.Exception)
{
}
}
// Smoothly rotate towards the target rotation
transform.rotation = Quaternion.Lerp(transform.rotation, targetRotation, speed * Time.deltaTime);
}
void OnApplicationQuit()
{
if (sp != null)
{
if (sp.IsOpen)
{
sp.Close(); // Close the port when the application quits
}
}
}
}