ロボット開発日記5 メカナムホイールローバー製作1(組立&初期動作編)

みなさん、こんにちは、横山です。
2024年に入って早くも4分の1が終わりました!
それにしても時間が経つのは、早いですね。
さてさて最近30分朝活にハマってきました☀️
忙しいサラリーマン生活の中で、なんとか趣味を継続して楽しくやれないかと考えてました。
その時に恩師(勝手に僕が心の中で呼んでるだけですがw)から次のことを教えてもらいました。
『一気にどかっとやるよりも小刻みに毎日やる方が良い!』
30分だけでもいいからモノづくりを毎日継続しようと考えたわけです。
初めてみると30分という時間の縛りはありがたくて、なんか色々手を動かしたくなっちゃうんですよね(笑)
本当に人間というのは、面白い。
さてさて本日は農場でイチゴを刈るためには、移動手段としてローバー🚘が必要!!
っということでラズベリーパイで動作可能なローバーキットを買ってみたので、早速組み立ててみました。
今回購入したもの
1. 4WD SMART CAR KIT🚗
Freenove

今回購入したローバーキットですが、Freenove社が販売しているキットになります。
インターネットから
①pdfファイル形式のマニュアル
②サンプルプログラム
③組み立てYouTube動画
まで紹介してくれている至れり尽くせりなメーカーさんです。
※マニュアル資料は下記リンクのFNK0043です。
ローバーキットの中身

今回購入したキットですが、大物の制御基板が1枚とモーター、メカナムホイール、各種センサーが揃っていました。
黄色のモーターは汎用的な部品なのかな〜って思って、Amazonで検索してみたら似たようなやつがありました。
こういった割り切った勉強キットも面白くていいですね!
このローバーを動かすためのRaspberry Piと18650のリチウムイオン電池は別で購入する必要があります。
今回のローバーキットですが、タイヤの種類が2種類あって販売されていました。
•通常のホイールver
•メカナムホイールver
メカナムホイールverは、通常のホイールverよりも1,000円ぐらい高いですが、大した値差ではないため、今回はこちらを購入しました😊
2. リチウムイオン電池(18650)🔋
XTAR社製
今回購入したローバーキットには、ラズベリーパイと電池は付属していません。
GitHubに全世界でこのキットを買った場合に、各国で買うべきおすすめのリチウムイオン電池が紹介されていました。
このリストに掲載されているXTAR社製のリチウムイオン電池(3.7V系)と充電器を楽天で購入。
ちなみに僕はAmazonのヘビーユーザーです。Amazonでも探してみたのですが18650のリチウムイオン電池があまり存在せず。
1.2V~1.5V系のアルカリ電池やニッケル水素電池ばっかりだったので、今回は楽天で購入。GitHubではUSB-TypeC充電式のリチウムイオン電池も紹介されていましたが、ちょっと怪しかったので、こちらは購入を見送り。


組み立て
モーターとメカナムホイール
さて、まずは基板とモーターを組み立てていきます。
今回はモーターをすぐに動かしたかったので、カメラ類のセンサー組み立ては後回しにしています。
すごくシンプルな部品の構成になっているため、30分もかからず、基板、モーター、メカナムホイールが組み立てられちゃいます。
シンプルイズベストですね〜。
本当に組み立てやすくて便利。



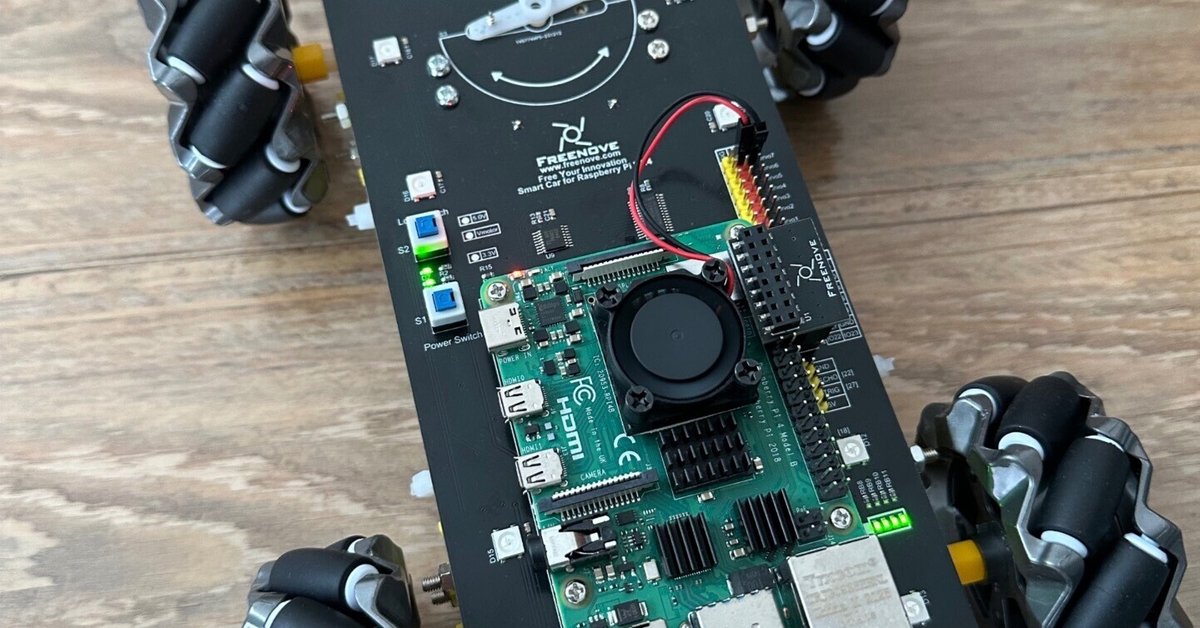
ラズパイと基板の接続も4本のボルトで簡単に締結できました。
基板側にラズパイ基板固定用のセルフクリンチングファスナーが実装されているのが面白かったです。
あんまり見たことなかったので、今後、僕も基板設計する時は積極的に使っていきたい。

完成動画(初期動作テスト)
モーターしか搭載していませんが、試しにサンプルファイルで動作させてみると、簡単に動いてくれました。
なんと18650電池からDC-DCコンバータでおそらくラズパイに直接5Vを給電してくれているようなので超助かる。
ACアダプターが不要なのが嬉しいですね!
今回はマニュアルのpdfファイルに全部初期設定が載っているので、コードは割愛させていただきます。
素晴らしいと思った点
組立動画が嬉しい
ちょっとした組み付け方も動画があるのでシンプルで分かりやすかったです。
残念だった点
ネジ穴が合わない(泣)
センサー組み付け用の土台を作ろうとしたら何回やってもネジ穴が合わず‥‥。
泣きたい気持ちになりました。

次回はPS4コントローラと連携して、リモート制御をやっていきたいと思います。
ここまで読んでいただきありがとうございました😆