
Inventor / ダイナミックシミュレーション / Box and Plate 7 / 荷重・トルク

実際の設計では、モデルを動かすためには、シリンダやモータといったアクチュエータを使用します。ダイナミックシミュレーションでは、それらは外部荷重として設定します。
外部荷重には、荷重とトルクがあります。また、重力も外部荷重のひとつです。
Box and Plate
荷重
準備
荷重の機能を確認するために、空間的ジョイントのプロパティ設定で、全ての自由度で、ジョイント荷重と強制モーションを無効(有効にするチェックを外します)にします。次に、一般タブの自由度のロックのチェックを外します。
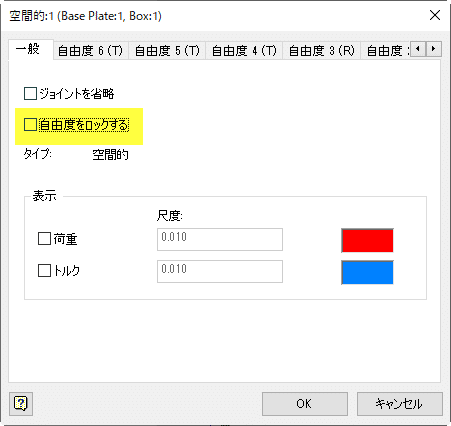
これで、ボックスは自由に移動回転できる状態です。無重力状態です。
荷重の設定

荷重の設定を行います。ダイアログボックスが表示されます。

位置(点)を選択します。モデル上の端点あるいは円を選択します。

次に方向を選択します。エッジまたは平面が選択できます。エッジの向き、あるいは面の法線方向が、設定されます。向きは変更できます。

最後に荷重の大きさを入力します。グラフで入力することもでき、条件に応じて荷重を変更する設定ができます。ここでは、定数値の 0.5N とします。

外部荷重がブラウザ上に追加されました。
シミュレーション実行
シミュレーションプレーヤーで、シミュレーションを実行します。思っていたのと違う動きをするのがわかります。これは、重心と異なる位置に荷重をかけたからです。

自由度を一つだけにする
空間的ジョイントのプロパティ設定で、荷重方向の自由度のみロックを外します。(一般タブで全体をロックしてから、自由度4のロックを外す)
再度シミュレーションを実行すると、まっすぐ移動することがわかります。
トルク
準備
トルクの機能を確認するために、空間的ジョイントのプロパティ設定で、全ての自由度で、ジョイント荷重と強制モーションを無効(有効にするチェックを外します)にします。次に、一般タブの自由度のロックのチェックを外します。
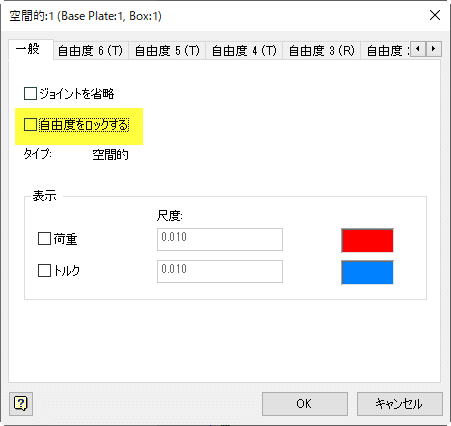
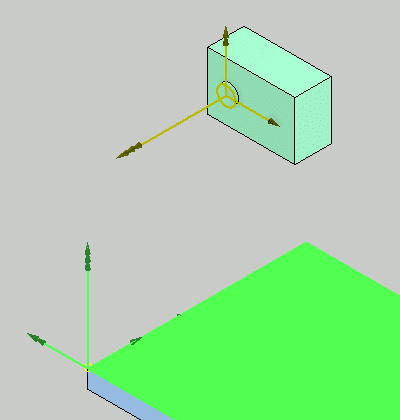
これで、ボックスは自由に移動回転できる状態です。無重力状態です。また、空間的ジョイントの座標系は以下のようになっています。
トルクの設定

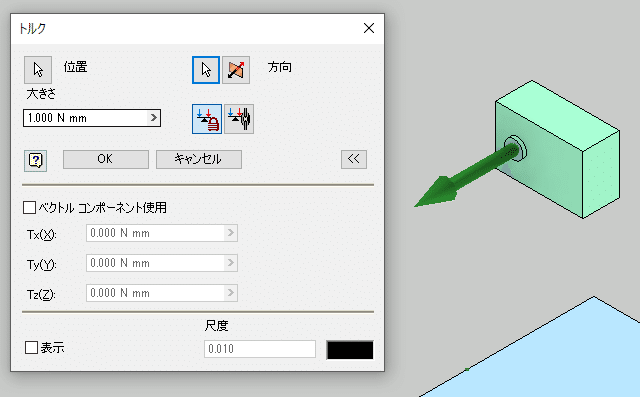
トルクの設定を行います。ダイアログボックスが表示されます。
シミュレーション実行
シミュレーションを実行すると、荷重の場合と同じように、グラグラとまわります。
荷重の場合と同じように、トルクの方向と同じ回転方向の自由度だけとすると、固定された軸周りに回転するようになります。
空間的ジョイントの設定からトルク設定までの一連の操作を動画にしました。
動画
データセット
役に立った!という記事にはチップをお願いします。チップは大変に励みになります。